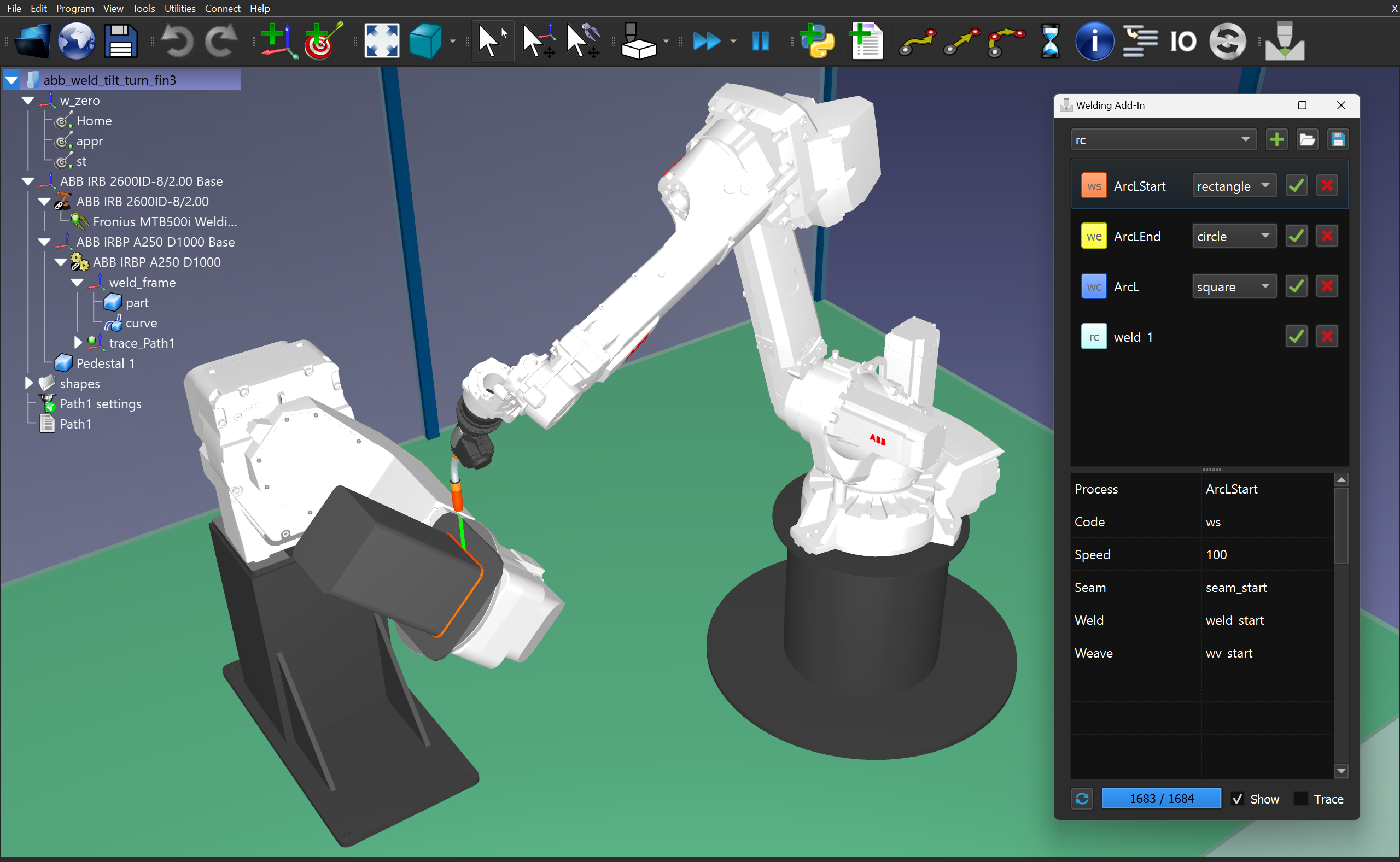
Add-in de soldagem
O Add-in de soldagem RoboDK permite que você aplique diferentes instruções e receitas de soldagem com os programas do RoboDK e as visualize adequadamente.
Com o Add-in de soldagem RoboDK, você pode fazer o seguinte:
1.Crie e adicione comandos facilmente, como comandos de início, continuação e fim de solda
2.Defina uma lista de parâmetros para os comandos criados (específicos para soldagem e visualização)
3.Visualize a trajetória como um modelo sólido
4.Visualize a criação de soldas (adição de material) usando uma forma/perfil de solda predefinido
5.Crie e adicione facilmente instruções de código customizadas
6.Salve todos os dados criados no projeto da estação
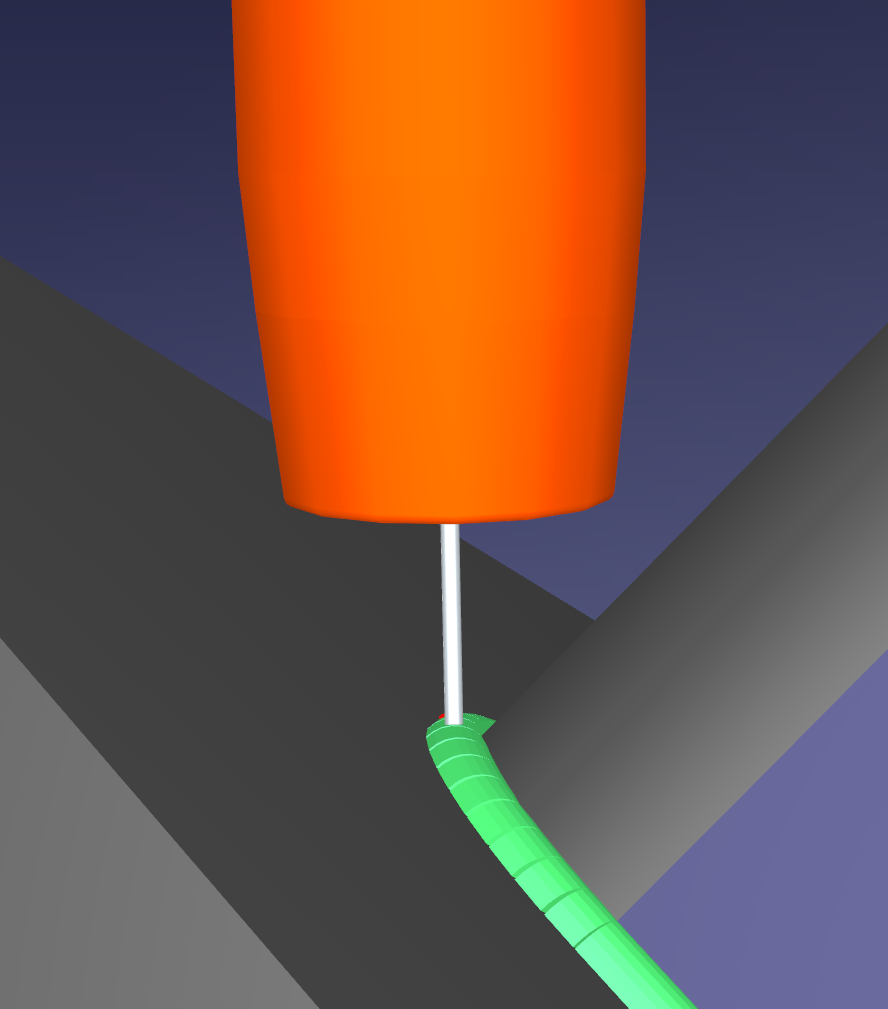
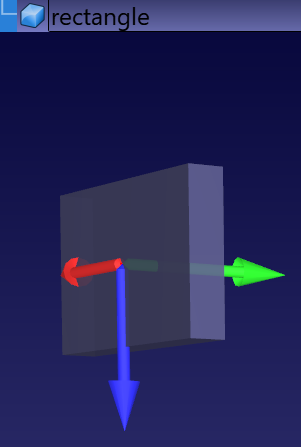
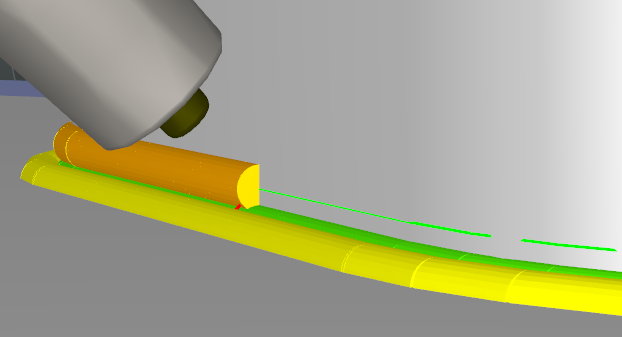
A imagem a seguir mostra uma visualização do cordão de solda.
Vídeo: Demonstração do Add-in de soldagem: https://www.youtube.com/watch?v=ahl2wAaP_cI.
Como instalar
Você pode fazer o download e instalar a versão mais recente do Add-in de soldagemna Biblioteca de Addins do RoboDK. A instalação é automática usando o Gerenciador de Add-ins.
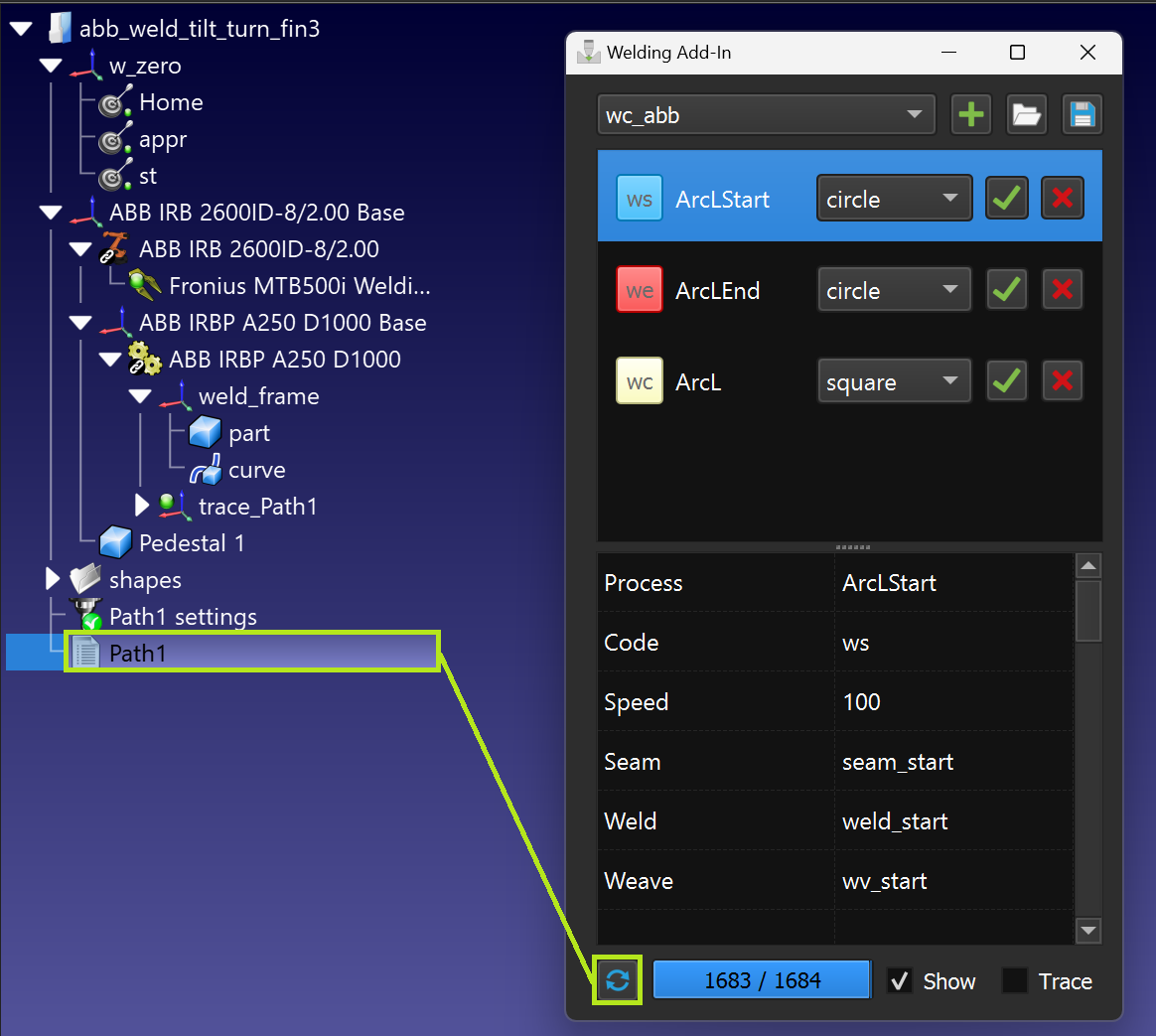
Interface de soldagem
Esta seção aborda as funcionalidades disponíveis da interface do usuário do Add-in de soldagem.
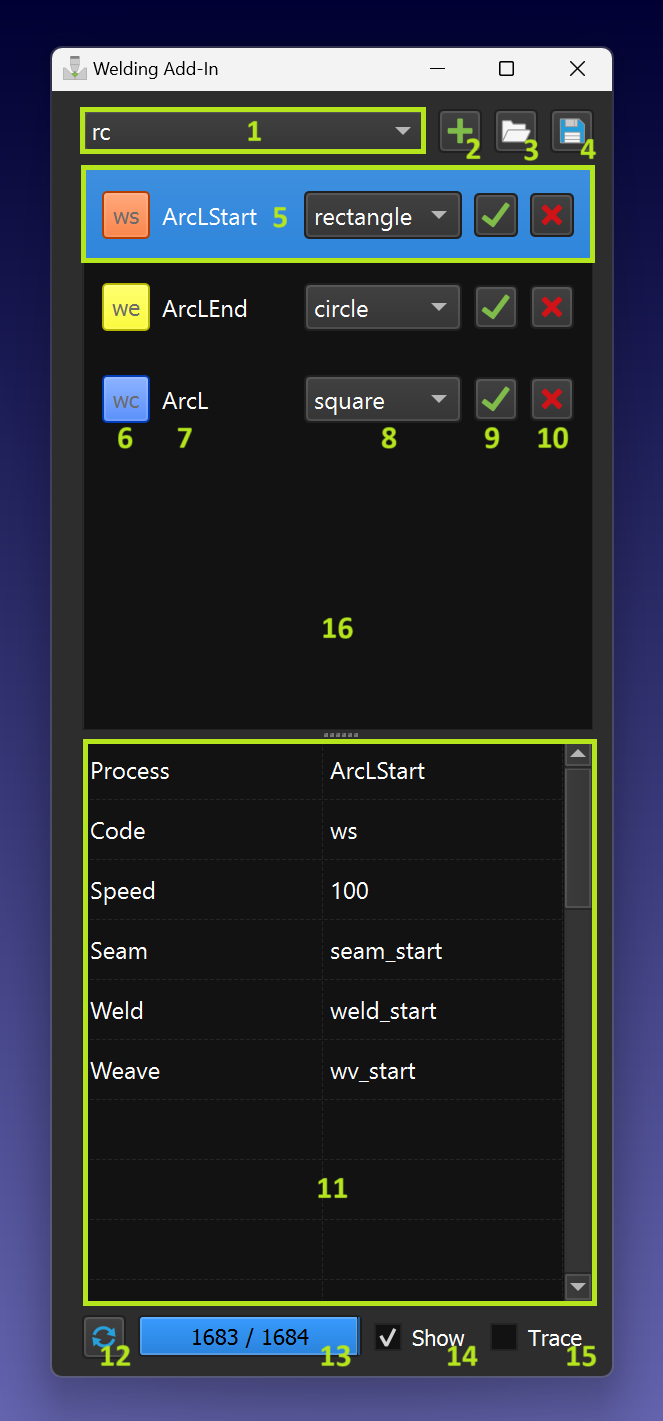
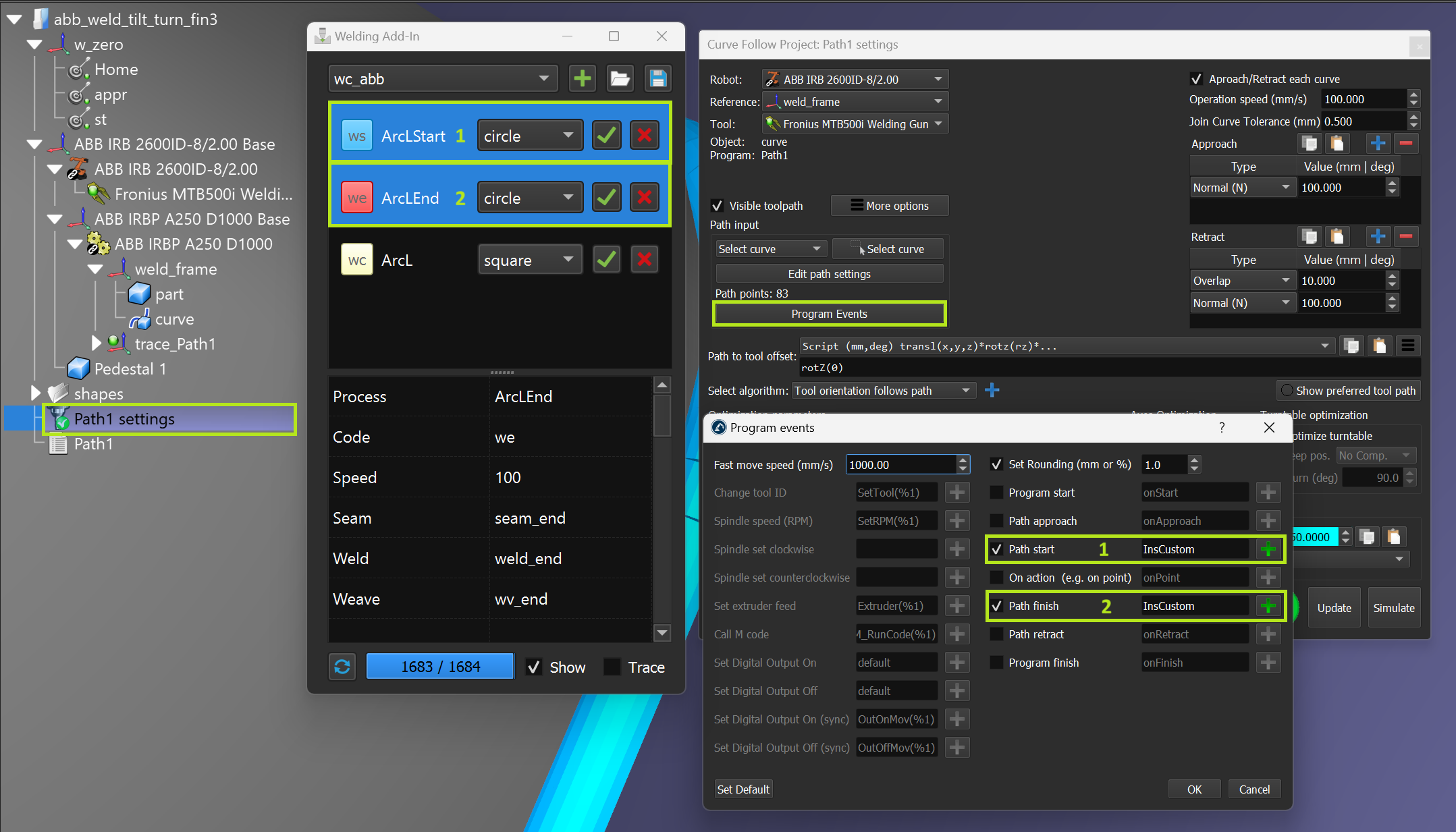
O Add-in de soldagem contém os seguintes elementos funcionais:
1.Menu suspenso de seleção de instruções.
2.Instrução adicionada à lista de instruções.
3.Importar lista de instruções.
4.Exportar lista de instruções.
5.Instrução atual (selecionada).
6.Código de instrução e cor do ícone (clique para alterar a cor).
7.Nome da instrução (exclusivo).
8.Forma apropriada da trajetória.
9.Add-in instruções à sequência do programa ou ao CFP.
10.Excluir instrução da lista.
11.Parâmetros vinculados à instrução selecionada.
12.Crie um modelo de caminho.
13.Progresso na construção do modelo de caminho.
14.Sinalizador de visibilidade do modelo de caminho.
15.Sinalizador de rastreamento de caminho (permite simular a adição do material).
16.Área da lista de instruções.
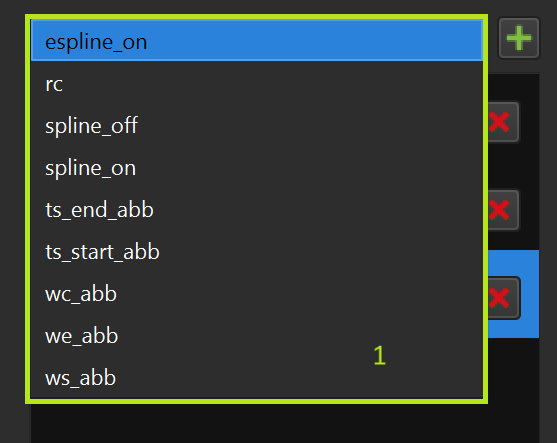
Menu suspenso de seleção de instruções
Você pode selecionar a instrução a ser adicionada no menu suspenso:
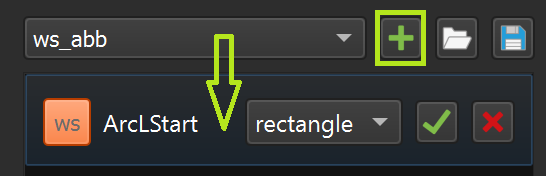
Adição de uma instrução à lista de instruções
Você pode adicionar a instrução selecionada no menu suspenso usando o botão “+”:
Os modelos de instrução estão na seguinte pasta (instalação padrão do RoboDK): C:\RoboDK\Addins\com.robodk.app.welding\WeldingAddIn\templates
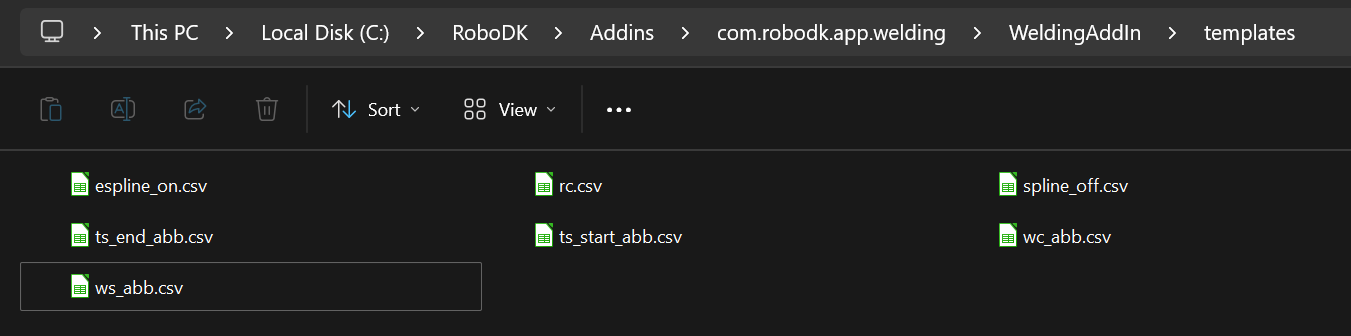
Os modelos são apresentados como arquivos “.csv” regulares com o formato de cadeia “parâmetro->valor”:
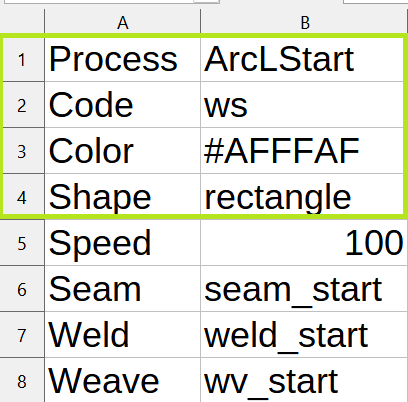
1.‘Processo’➔ ‘Nome do Processo’ (algum nome deve ser especificado)
2.‘Código’➔ ‘Código de instrução’ (um dos códigos de instrução suportados)
3.‘Cor’➔qualquer código de cor no formato hexadecimal
4.‘Forma’➔nome do arquivo com o modelo de forma para as instruções de soldagem
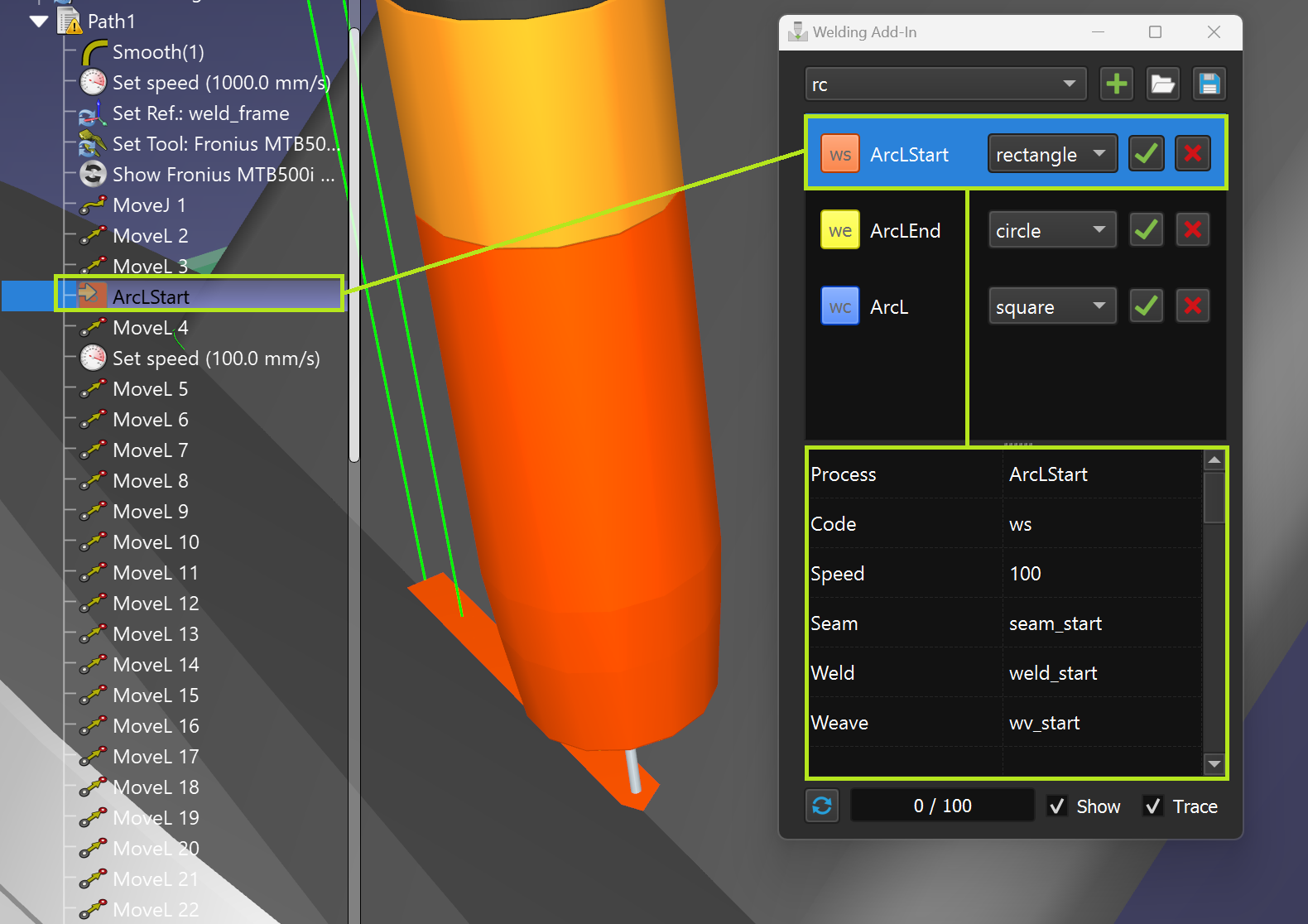
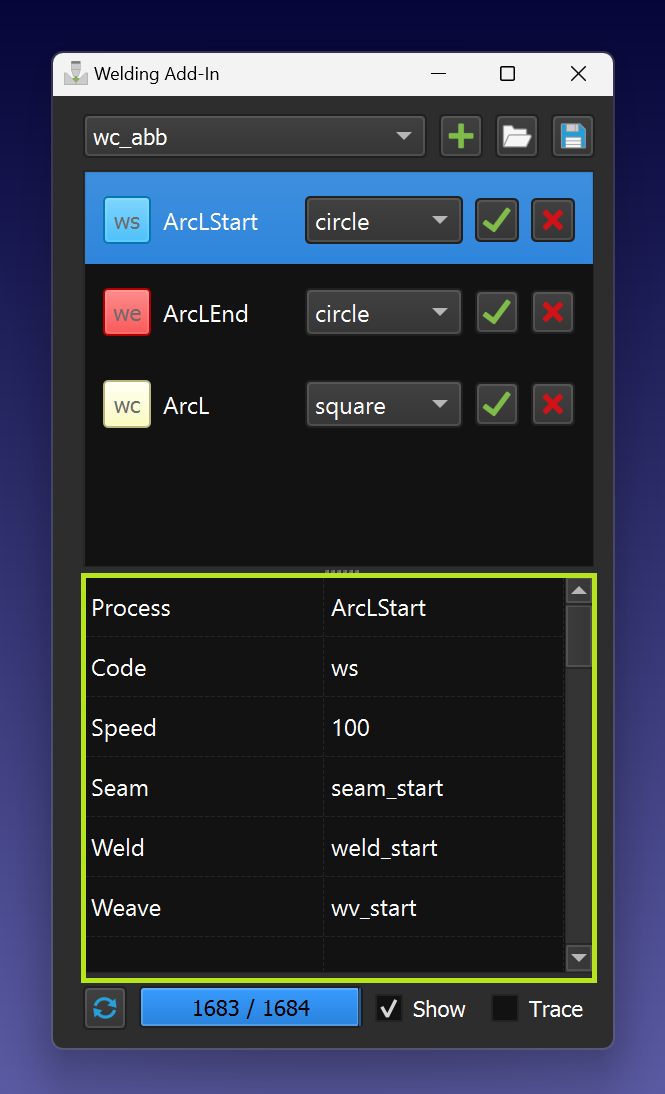
Instrução atual (selecionada)
Você pode acessar os parâmetros selecionando uma linha na lista de instruções (9). Além disso, a linha de instrução é destacada automaticamente durante a execução do programa ou quando você clica duas vezes na instrução de programa correspondente:
Código de instrução e cor do ícone
Você pode definir a cor da instrução e a trajetória correspondente clicando no botão de código de instrução (certifique-se de que a linha de instrução esteja selecionada primeiro):
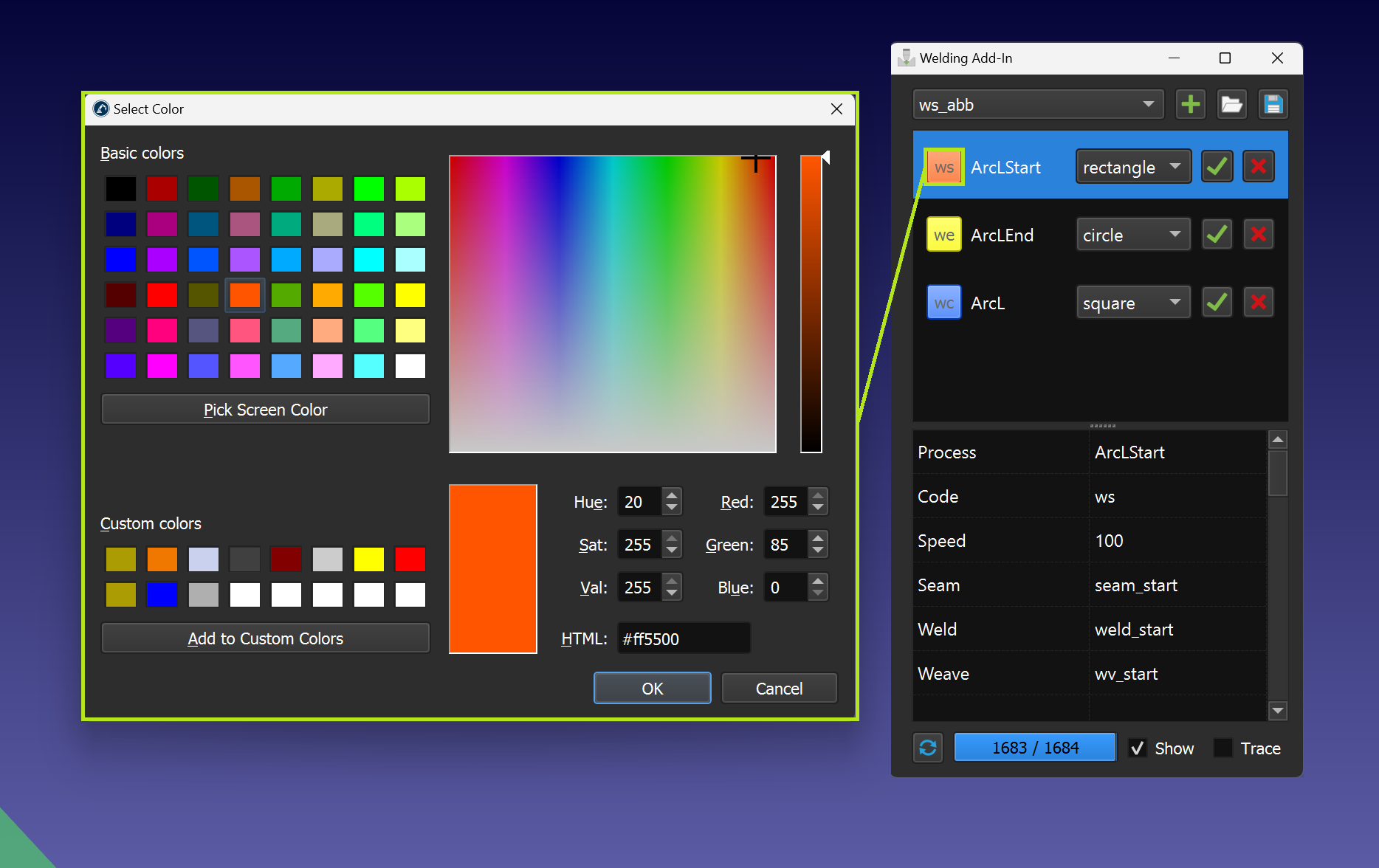
1.ws - instrução de início de soldagem
2.wc - instrução contínua de soldagem
3.we - instrução final de soldagem
4.rc - instrução personalizada Insert Code
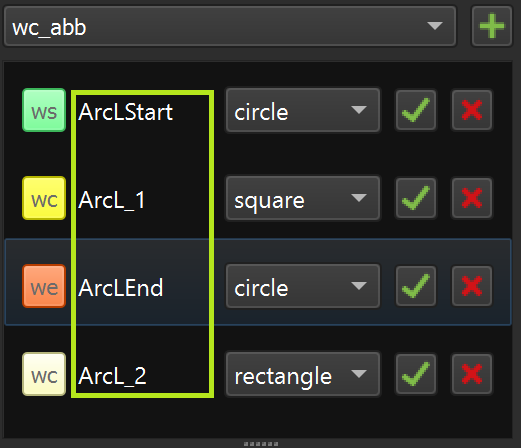
Nome da instrução
Cada instrução na lista de instruções deve ter um nome exclusivo (valor do parâmetro “Processo”):
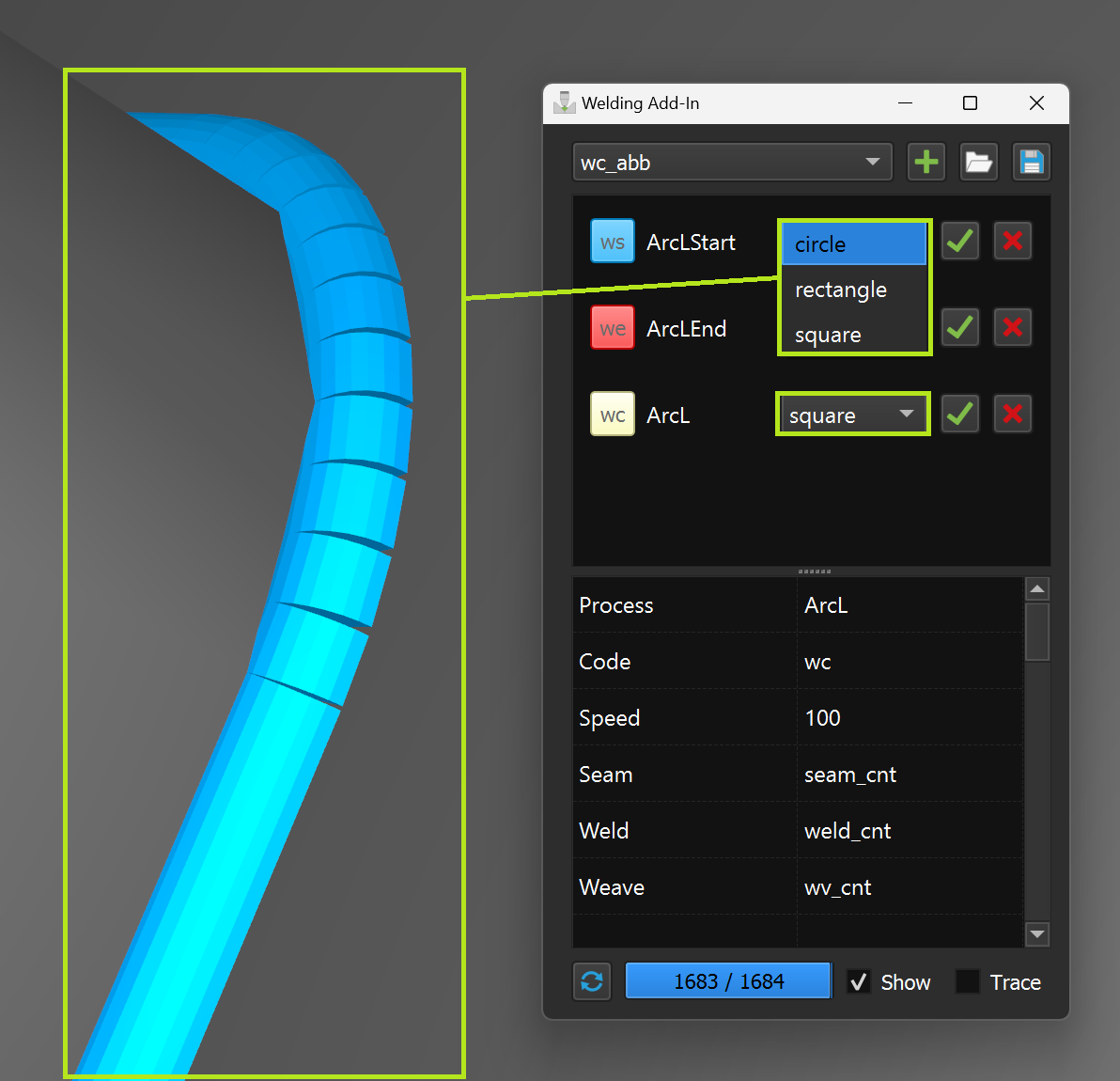
Forma de trajetória
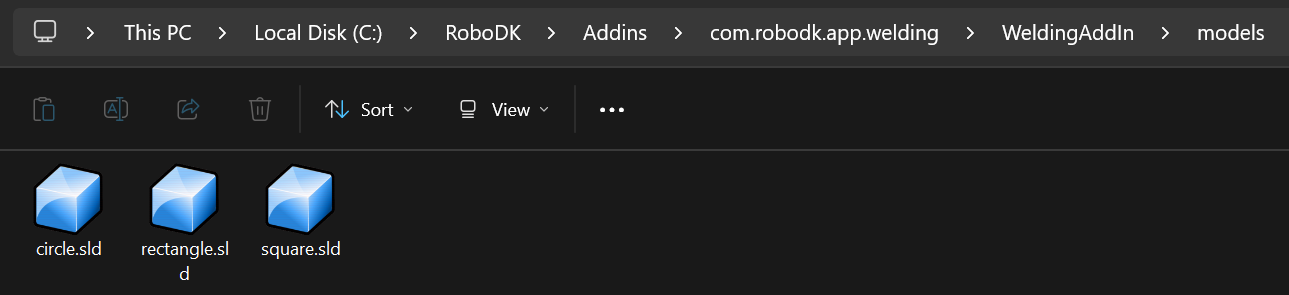
Se o modelo de instrução tiver uma definição de forma de trajetória, ela poderá ser selecionada no menu suspenso:
C:\RoboDK\Addins\com.robodk.app.welding\WeldingAddIn\models
Adicionar instruções à sequência de programas
Uma única instrução ou um par de instruções selecionadas sequencialmente pode ser adicionado a uma sequência de programas do RoboDK.
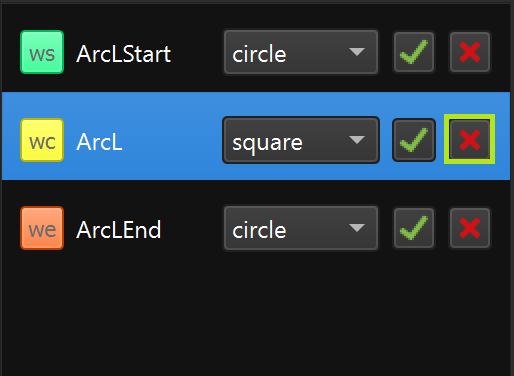
Excluir instrução da lista
Você pode excluir uma instrução da lista de instruções clicando no botão “X”.
Parâmetros
Você pode alterar os parâmetros diretamente na tabela de parâmetros. As alterações podem ser salvas automaticamente.
Importação/exportação de parâmetros
Você pode importar a lista completa de instruções com parâmetros ou exportar todos os dados usando as funções de importação/exportação.

Construção de trajetórias
Você pode criar a trajetória usando a função ‘Criar’ para o programa selecionado (ele precisa conter instruções de soldagem).
Rastreamento de trajetórias
Ao ativar a opção “Rastreamento”, é possível ver como o material de soldagem é aplicado à medida que o robô se move ao longo da trajetória de soldagem.

Pós-processadores com suporte
O Add-in de soldagem oferece recursos de simulação e programação off-line. As instruções são adicionadas ao programa do controlador específico do seu robô. Um número crescente de pós-processadores está oferecendo suporte às instruções do Add-in de soldagem, incluindo:
1.ABB RAPID IRC5
2.ABB RAPID S4C
3.Fanuc R30i
4.Kawasaki
5.KUKA KRC2 DAT
6.Motoman
Entre em contato conosco para adicionar suporte a um controlador específico.
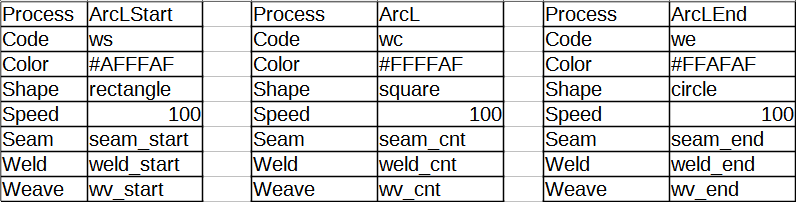
Modelos de soldagem ABB
Os modelos abb_ws.csv, abb_wc.csv e abb_we.csv são usados como modelos de soldagem ABB para os comandos de início de soldagem (ArcLStart), continuação de soldagem (ArcL) e fim de soldagem (ArcLEnd), respectivamente. Os parâmetros ‘Seem’, ‘Weld’ e ‘Weave’ nesses modelos devem ser iguais aos nomes das variáveis de soldagem correspondentes no controlador real.
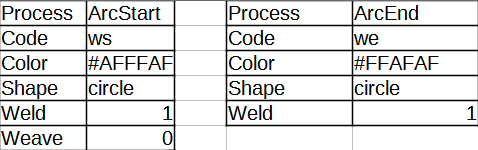
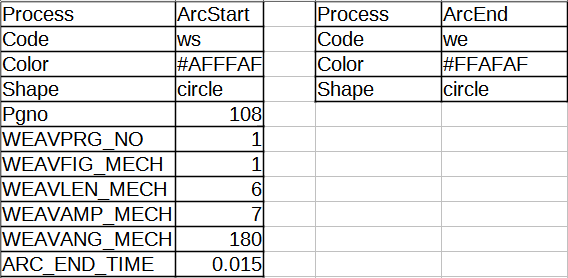
Modelos de soldagem Fanuc
Os modelos fanuc_ws.csv e fanuc_we.csv são usados como modelos de soldagem Fanuc para os comandos ArcStart e ArcEnd, respectivamente. O ArcStart pode ser usado novamente para alterar o modo de soldagem diretamente no processo. Os parâmetros “Weld” e “Weave” nesses modelos devem ser iguais aos valores das variáveis de soldagem correspondentes no controlador real.
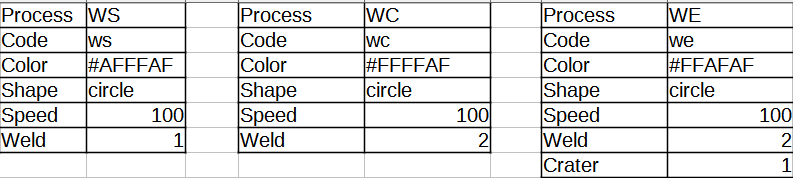
Modelos de solda da Kawasaki
Os modelos kawasaki_ws.csv, kawasaki_wc.csv e kawasaki_we.csv são usados como modelos de soldagem da Kawasaki para os comandos weld start (WS), weld continue (WC) e weld end (WE), respectivamente. Os parâmetros “Weld” (Solda) e “Crater” (Cratera) nesses modelos devem ser iguais às variáveis de solda correspondentes no controlador real (por exemplo, números W1SET e W2SET).
Modelos de solda da KUKA
Os modelos kuka_ws.csv e kuka_we.csv são usados como modelos de soldagem KUKA para os comandos ArcStart e ArcEnd, respectivamente. Os parâmetros no modelo ArcStart devem ser iguais aos valores das variáveis de soldagem correspondentes no controlador real.
Modelos de soldagem Motoman
Os modelos motoman_ws.csv, motoman_wc.csv e motoman_we.csv são usados como modelos de soldagem Motoman para os comandos de início de soldagem (ARCON), continuação de soldagem (ARCSET) e fim de soldagem (ARCOF), respectivamente. Os parâmetros “ASF”, “ACOND” e “AEF” nesses modelos devem ser iguais aos valores das variáveis de soldagem correspondentes no controlador real.
