Configure a câmera simulada
Para sobrepor com precisão os recursos da estação sobre o feed de vídeo, é necessário criar uma câmera simulada. Essa câmera simulada usa a pose e a trajetória da câmera calculadas usando os marcadores fiduciais para gravar a estação do RoboDK a partir do mesmo ângulo, distância e trajetória que o feed de vídeo de entrada.
A resolução dessa câmera simulada precisa corresponder ao vídeo de entrada para que o dimensionamento do marcador seja preciso. As etapas para adicionar uma câmera virtual à estação estão descritas abaixo:
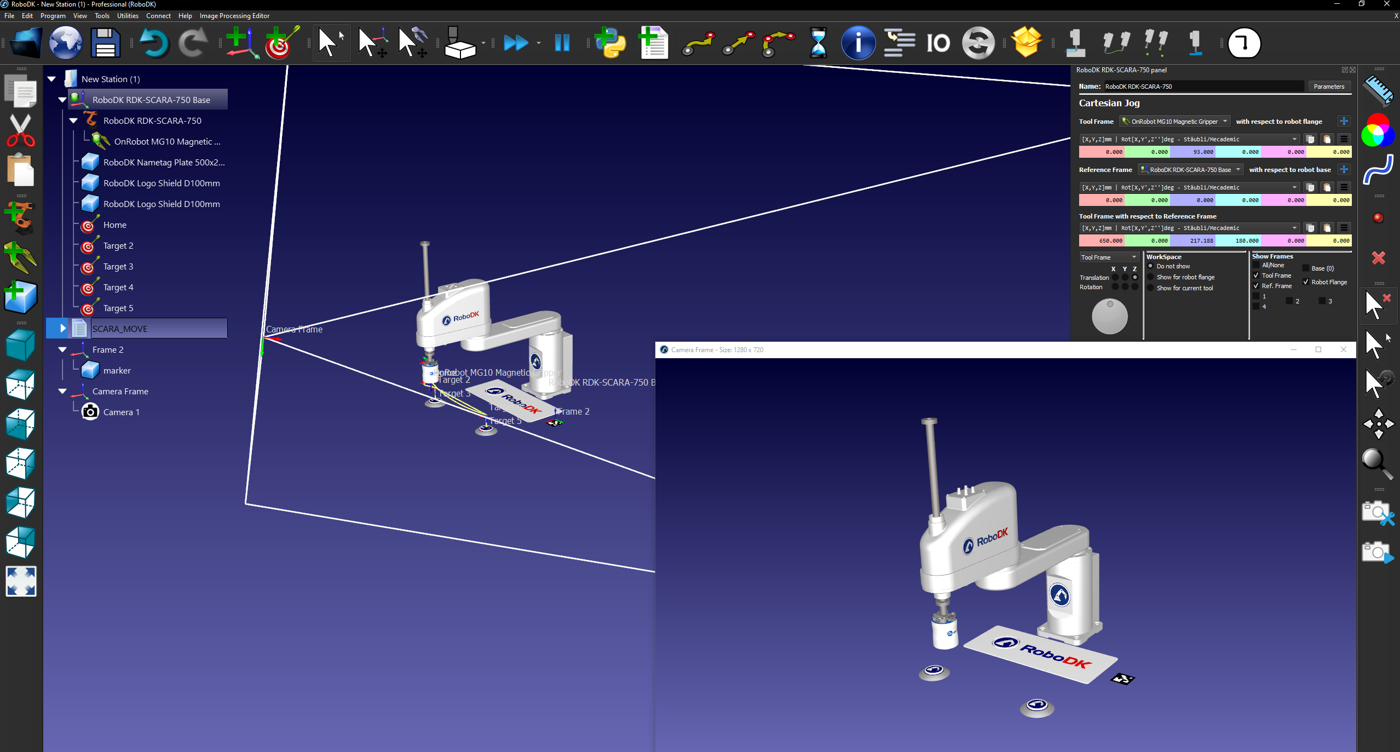
1.Adicione uma câmera à sua estação selecionando Editor de Processamento de Imagens à Adicionar uma câmera RoboDK na barra de ferramentas.
2.Clique com o botão direito do mouse na câmera ou no feed da câmera e selecione " Configurações da câmera ".
3.Ajuste as configurações da câmera virtual para corresponder à resolução do feed de vídeo de entrada.
4.Alinhe o quadro de referência para que a câmera simulada possa ver o marcador Aruco virtual.
Para obter os melhores resultados, o vídeo de entrada física deve ser gravado com as seguintes considerações:
1.Coloque o marcador em uma superfície plana em um ambiente bem iluminado. Para obter os melhores resultados, considere o tamanho e a distância dos objetos na estação virtual em relação ao marcador e ao ambiente de gravação.
2.Configurações consistentes da câmera (as câmeras reais e simuladas devem ter configurações de resolução correspondentes).
3.Identificações legíveis da Aruco (a câmera deve manter as identificações legíveis). Coisas a evitar: Filmagem rápida/desfocada, baixa resolução da câmera, alta distância do marcador em relação à câmera).
4.Certifique-se de que o vídeo esteja no formato .mp4 ou .avi