Biblioteca RoboDK
A Biblioteca RoboDK é uma biblioteca que oferece uma coleção de robôs, exemplos, ferramentas, eixos externos, Add-ins e pós-processadores. A Biblioteca RoboDK pode ajudá-lo a encontrar e baixar facilmente seus robôs, procurar exemplos, instalar add-ins ou saber mais sobre como configurar seu pós-processador para gerar programas para seus controladores.
Você pode acessar a Biblioteca do RoboDK navegando até https://robodk.com/library. Você também pode selecionar Ferramentas ➔ Abrir Biblioteca de Robôs na barra de ferramentas principal do RoboDK.
Pesquisando itens da biblioteca
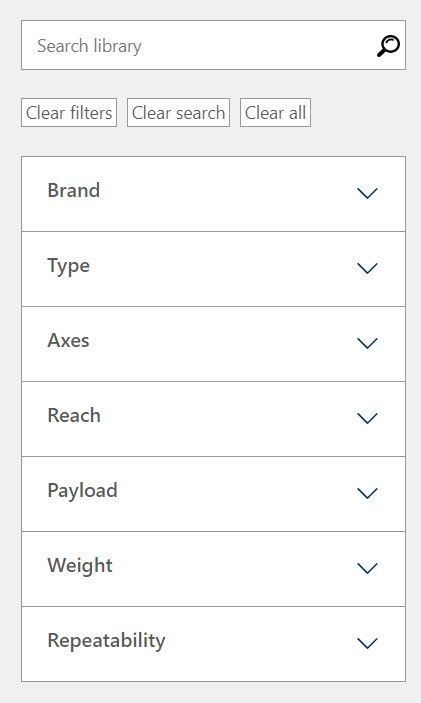
Use a barra de pesquisa na parte superior da Biblioteca RoboDK para procurar robôs específicos, exemplos, ferramentas add-ins ou pós-processadores.
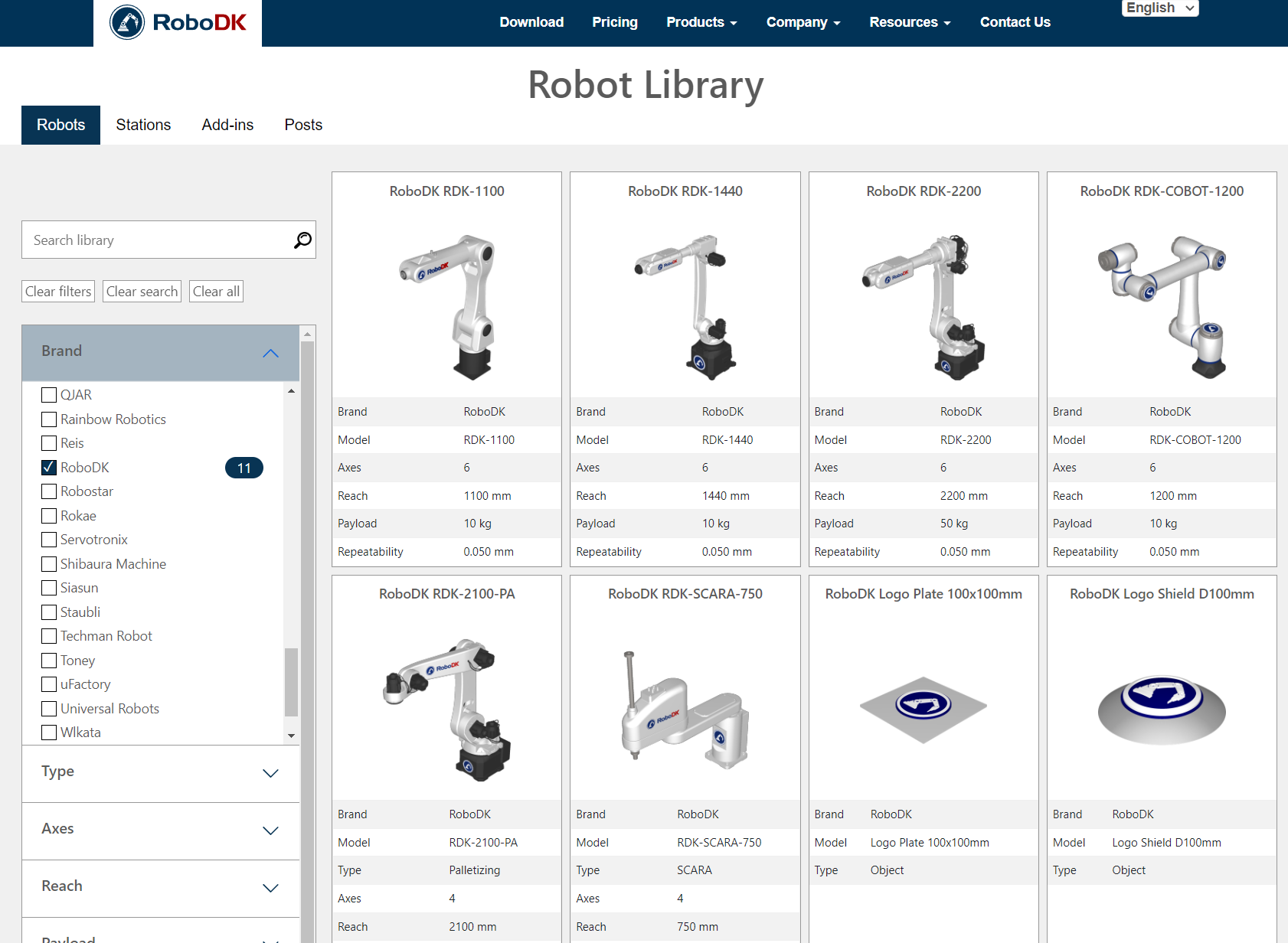
Por exemplo, quando você estiver procurando um robô, poderá filtrar os resultados por marca, tipo ou outros critérios, dependendo da biblioteca ativa. Os itens exibidos serão atualizados automaticamente para levar em conta seus filtros.
Categorias de bibliotecas
A biblioteca do RoboDK está dividida em diferentes seções para facilitar a busca. Essas seções incluem Robôs, Estações, Add-ins e Posts.
Você pode encontrar as seguintes seções ou guias na biblioteca:
1.A seção Robôs oferece uma ampla coleção de equipamentos e acessórios robóticos. Isso inclui modelos de robôs, como braços antropomórficos, robôs Delta, robôs de paletização e robôs SCARA de marcas líderes do setor. A categoria também destaca eixos externos, como mesas giratórias, posicionadores, trilhos lineares e pórticos. Para EOATs, você pode encontrar ferramentas que vão desde pinças e pistolas de solda até dispensadores, lixadeiras, esmerilhadeiras, fusos, trocadores de ferramentas e adaptadores de flange. Além disso, para complementar suas simulações, a categoria oferece objetos de uso geral, como formas, garrafas, caixas, paletes, pedestais, câmeras, mesas e peças de amostra, garantindo uma seleção abrangente para todos os seus requisitos de simulação robótica.
2.A seção Estações oferece exemplos pré-configurados que demonstram uma variedade de aplicações, ferramentas e técnicas robotizadas. Essas estações de exemplo podem ser usadas como modelos básicos ou como referências para projetos individuais. As aplicações apresentadas abrangem um amplo espectro, incluindo manufatura aditiva, manipulação de materiais, adesivagem, corte, fresagem, perfuração, retificação, usinagem, pintura, paletização, soldagem e muitas outras, garantindo uma visão diversificada e abrangente das aplicações robóticas.
3.A seção Add-ins permite que você explore os add-ins disponíveis, projetados para estender e personalizar as funcionalidades do RoboDK. Os Add-ins incluem Apps (baseados em Python) e Plug-ins (interface C++), tanto do RoboDK quanto de terceiros. Alguns Add-ins são opções pagas separadas que devem ser adicionadas ao software RoboDK.
4.A seção Posts permite que você navegue pela lista de pós-processadores disponíveis por padrão no RoboDK. Esses pós-processadores tornam os programas gerados pelo RoboDK compatíveis com diferentes robôs, controladores e máquinas CNC. Esses pós-processadores permitem que o RoboDK gere programas de robôs para controladores de robôs específicos. As opções populares incluem ABB, Fanuc, KUKA, Yaskawa Motoman, Staubli, Universal Robots e várias outras, garantindo a compatibilidade em um amplo espectro de plataformas robóticas.
Ações da biblioteca
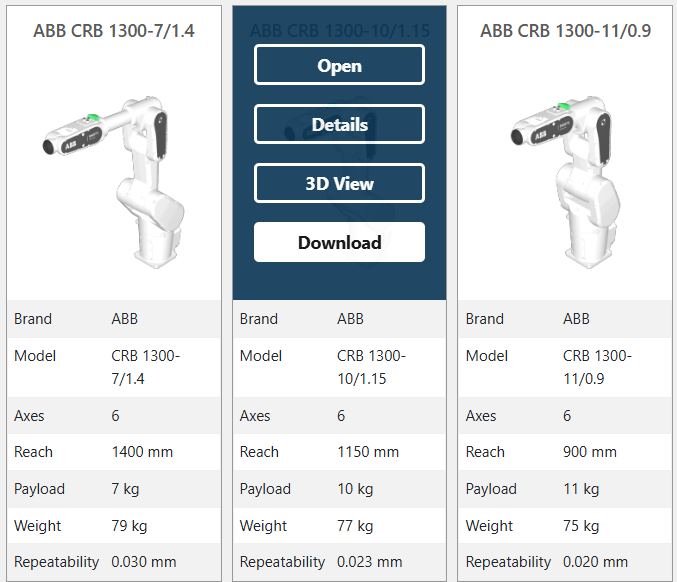
Um menu com algumas opções é exibido sobre os itens da biblioteca quando o mouse passa sobre a imagem.
Dependendo do conteúdo, as seguintes ações são possíveis:
1.Abrir: Abra diretamente o item em sua instância em execução do RoboDK Desktop.
2.Detalhes: Abrir uma nova guia com mais informações sobre o item.
3.Visualização 3D: Abra o item no RoboDK para Web, uma versão do RoboDK baseada na Web.
4.Download: Baixar uma cópia local do item.