Frames de referência
Um frame de referência define a localização de um item em relação a outro item com uma determinada posição e orientação. Um item pode ser um objeto, um robô ou outro frame de referência. Todos os programas de programação off-line exigem a definição de um frame de referência para localizar o objeto em relação a um robô para atualizar a simulação de acordo com isso.
Arraste e solte qualquer frame de referência ou objeto na Árvore de estações para definir um relacionamento específico, como o frame de referência aninhado mostrado na imagem a seguir.
É comum definir a localização de um ou mais frames de referência com relação ao robô tocando em 3 pontos. Isso permite colocar objetos no espaço virtual. O procedimento pode ser realizado usando o terminal de programação do robô ou o RoboDK (mais informações disponíveis na seção Calibrar Frame de referência).
Com o RoboDK, é possível inserir manualmente os valores de translação e rotação, incluindo diferentes ordens de rotação dos ângulos de Euler.
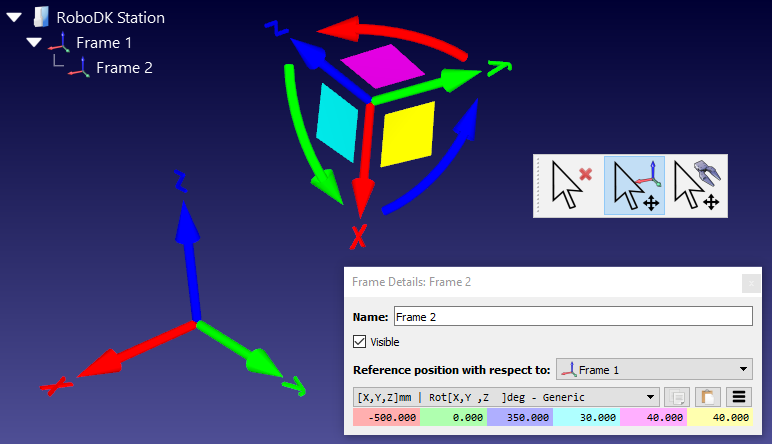
Por padrão, o RoboDK exibe a relação como a posição XYZ e os ângulos de Euler no formato X ➔ Y ➔ Z. Isso significa que a rotação é feita na seguinte ordem:
1.Primeiro: é feita uma rotação em torno do eixo X (caixa azul claro).
2.Segundo: é feita uma rotação em torno do eixo Y estático (caixa rosa).
3.Terceiro: é feita uma rotação em torno do eixo Z estático (caixa amarela).
Por exemplo, os controladores Fanuc e Motoman usam o formato descrito anteriormente; no entanto, outros fabricantes de robôs tratam a ordem de rotação de maneira diferente.
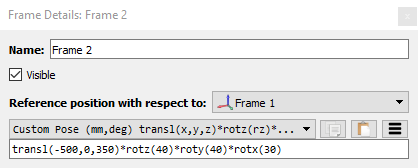
É possível selecionar entre diferentes formatos de orientação na lista suspensa da janela de detalhes do frame de referência (clique duas vezes em um frame de referência).
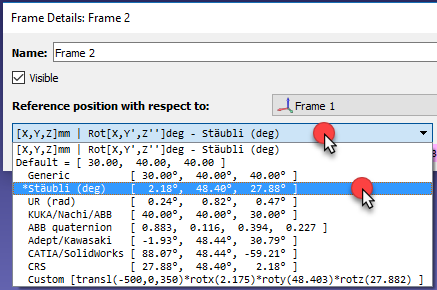
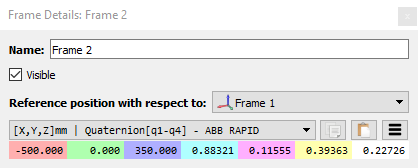
Por exemplo, os robôs Stäubli usam a ordem X➔ Y'➔ Z'', ou os robôs KUKA e Nachi usam Z➔ Y'➔ X''. Por outro lado, os controladores ABB usam valores Quatérnio, que exigem 4 valores para definir a rotação:
Também é possível inserir manualmente um formato personalizado. Por exemplo, o comando a seguir é exibido quando a opção Script (Custom Pose) é selecionada: