Guia básico
O RoboDK é um software para simulação e programação off-line. A programação off-line significa que os programas do robô podem ser criados, simulados e gerados off-line para um modelo e um controlador de robô específicos. O RoboDK pode ajudá-lo nas operações de manufatura que envolvem robôs industriais.
Este documento é um guia básico para a documentação do RoboDK. A documentação do RoboDK é baseada na versão Windows do RoboDK.
Instalando o RoboDK
Você pode instalar o RoboDK fazendo o download em nosso site: https://robodk.com/download. Talvez seja necessário preencher um formulário com seu e-mail para acessar o download. Depois de preencher o formulário, você poderá acessar o download imediatamente.
O RoboDK está disponível para Windows, Mac e Ubuntu.
Há também uma versão mais leve e simplificada do RoboDK disponível em um navegador chamado RoboDK para Web. O uso do RoboDK para Web requer uma conexão estável com a Internet.
Iniciando o RoboDK
Clique duas vezes no atalho da área de trabalho para iniciar o RoboDK. Você deverá ver o atalho do RoboDK na área de trabalho depois de instalar o programa a partir do nosso site. Clique duas vezes no atalho para iniciar o RoboDK.

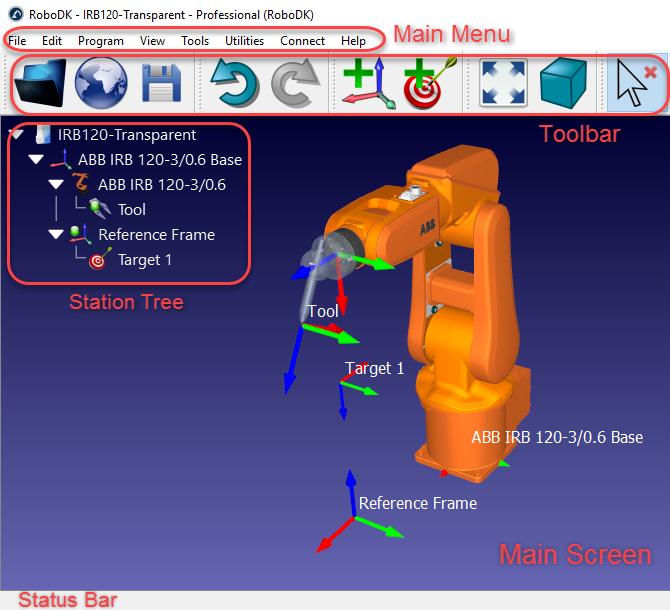
A janela do RoboDK contém um menu principal, uma barra de ferramentas, uma barra de status e a tela principal. A árvore da estação na tela principal contém todos os itens disponíveis na estação, como robôs, Frames de referência, ferramentas, programas, etc. Mais informações estão disponíveis na Seção Interface.
Selecione Arquivo ➔
Uma biblioteca de robôs está disponível on-line e você pode acessá-la diretamente do software RoboDK.
Em toda a documentação do RoboDK, os cliques na tela são representados pelos seguintes ícones:
|
|
|
Clique com o botão esquerdo do mouse | Clique com o botão direito do mouse | Clique duas vezes |



https://www.youtube.com/watch?v=xZ2_JEbS_E0&index=1&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl
Navegação 3D
Para manipular simulações em 3D, é necessário navegar pela visualização 3D de forma confortável. A cena e todo o conteúdo têm um frame de referência mundial fixo (referência de estação) e a câmera é movida para gerar o ponto de vista desejado.
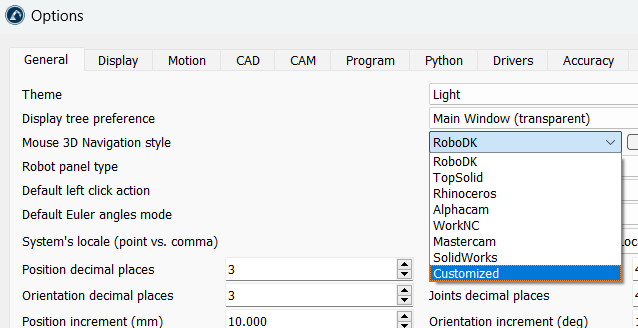
Recomenda-se o uso de um mouse de 3 botões para navegar em 3D. Como alternativa, é possível usar uma combinação das teclas Ctrl, Alt e Shift com um simples clique com o botão esquerdo do mouse para realizar movimentos de Pan, Rotate ou Zoom.
Selecione | Panorâmica | Girar | Zoom |
|
|
|
|
|
|
|
|
Clique com o botão esquerdo do mouse | Mantenha o botão central pressionado | Mantenha pressionado o botão direito do mouse | Mover a roda do mouse |
Mantenha a tecla Ctrl pressionada para selecionar mais de | Mantenha pressionado Ctrl + Alt | Mantenha pressionada a tecla Ctrl+ Shift | Mantenha pressionada a tecla Shift |




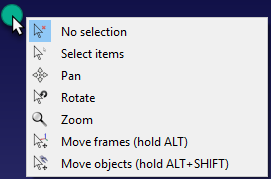
Clique com o botão direito do mouse na tela principal para ver os mesmos comandos de navegação 3D. Isso é útil se você estiver usando um laptop e não tiver acesso a um mouse.

Começando
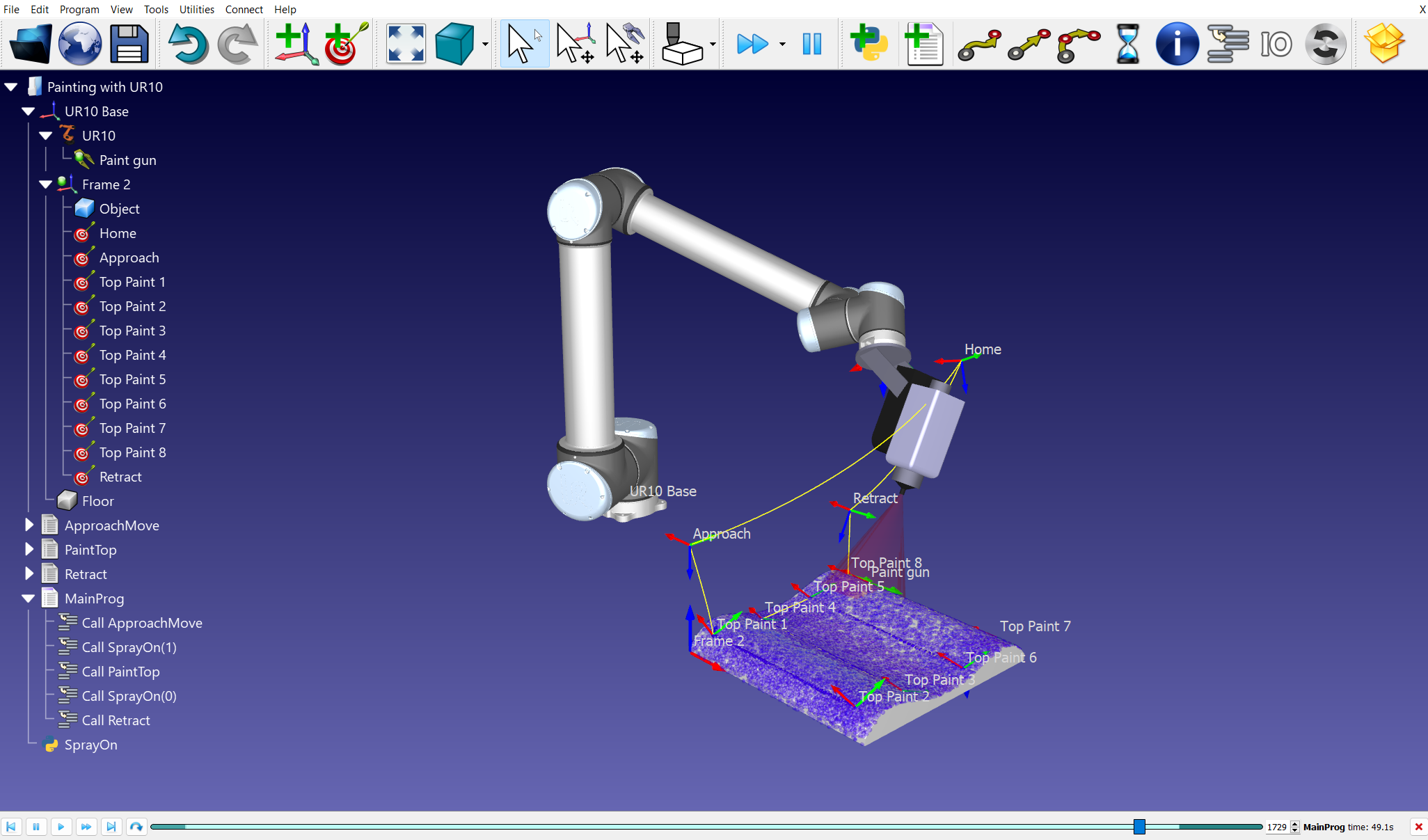
A seção Primeiros Passos mostra como construir um projeto simples off-line para uma aplicação de pintura com robô no RoboDK usando um robô UR10. O exemplo fornece uma visão geral de alguns dos principais recursos do RoboDK para Simulação e Programação Off-line.
A seção de introdução inclui:
1.Como carregar um robô na biblioteca on-line
2.Como
3.Como
4.Como acessar
5.Como acessar
6.Como
7.Como 
8.Como
Esse exemplo está disponível na biblioteca do RoboDK chamada Painting with UR10. Você pode fazer o download e abrir o arquivo Painting-with-UR10.rdk com o RoboDK.
Biblioteca RoboDK
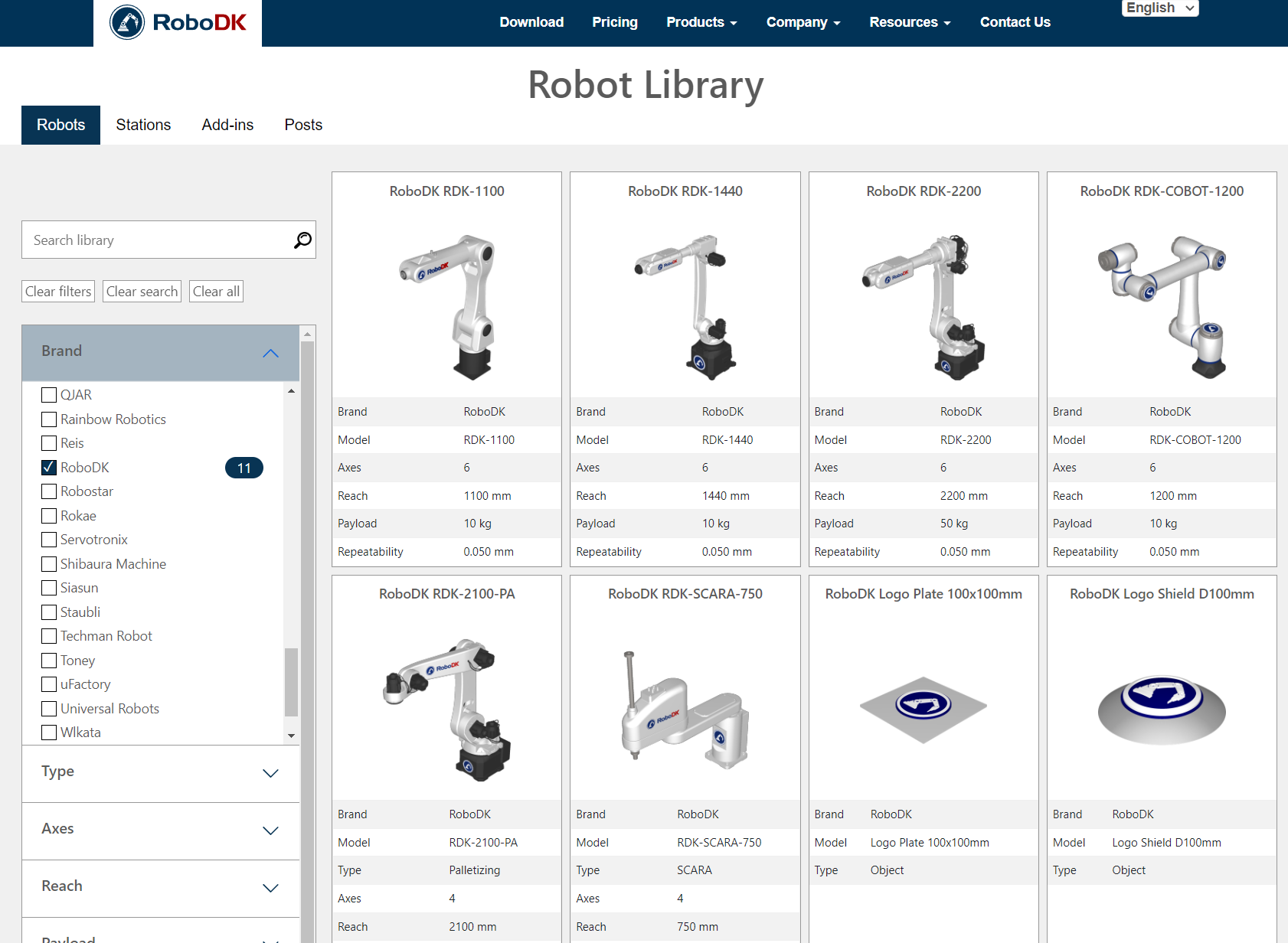
A Biblioteca RoboDK é uma biblioteca que oferece uma coleção de robôs, exemplos, ferramentas, eixos externos, Add-ins e pós-processadores. A Biblioteca RoboDK pode ajudá-lo a encontrar e baixar facilmente seus robôs, procurar exemplos, instalar add-ins ou saber mais sobre como configurar seu pós-processador para gerar programas para seus controladores.
Você pode acessar a Biblioteca do RoboDK navegando até https://robodk.com/library. Você também pode selecionar Ferramentas ➔ Abrir Biblioteca de Robôs na barra de ferramentas principal do RoboDK.
Pesquisando itens da biblioteca
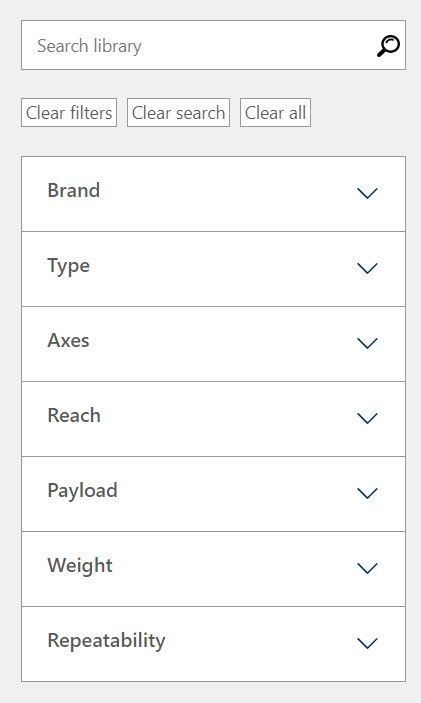
Use a barra de pesquisa na parte superior da Biblioteca RoboDK para procurar robôs específicos, exemplos, ferramentas add-ins ou pós-processadores.
Por exemplo, quando você estiver procurando um robô, poderá filtrar os resultados por marca, tipo ou outros critérios, dependendo da biblioteca ativa. Os itens exibidos serão atualizados automaticamente para levar em conta seus filtros.
Categorias de bibliotecas
A biblioteca do RoboDK está dividida em diferentes seções para facilitar a busca. Essas seções incluem Robôs, Estações, Add-ins e Posts.
Você pode encontrar as seguintes seções ou guias na biblioteca:
1.A seção Robôs oferece uma ampla coleção de equipamentos e acessórios robóticos. Isso inclui modelos de robôs, como braços antropomórficos, robôs Delta, robôs de paletização e robôs SCARA de marcas líderes do setor. A categoria também destaca eixos externos, como mesas giratórias, posicionadores, trilhos lineares e pórticos. Para EOATs, você pode encontrar ferramentas que vão desde pinças e pistolas de solda até dispensadores, lixadeiras, esmerilhadeiras, fusos, trocadores de ferramentas e adaptadores de flange. Além disso, para complementar suas simulações, a categoria oferece objetos de uso geral, como formas, garrafas, caixas, paletes, pedestais, câmeras, mesas e peças de amostra, garantindo uma seleção abrangente para todos os seus requisitos de simulação robótica.
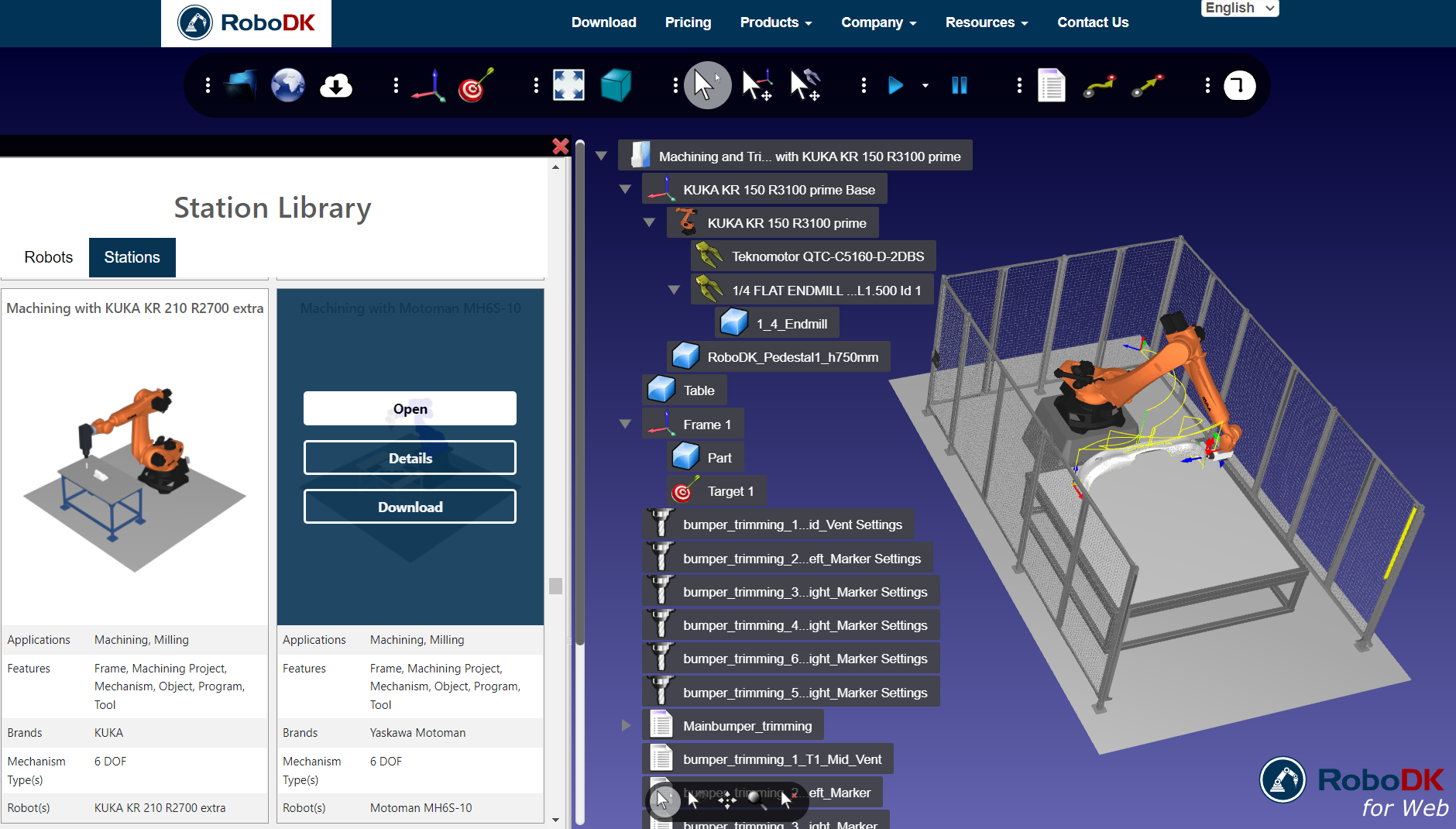
2.A seção Estações oferece exemplos pré-configurados que demonstram uma variedade de aplicações, ferramentas e técnicas robotizadas. Essas estações de exemplo podem ser usadas como modelos básicos ou como referências para projetos individuais. As aplicações apresentadas abrangem um amplo espectro, incluindo manufatura aditiva, manipulação de materiais, adesivagem, corte, fresagem, perfuração, retificação, usinagem, pintura, paletização, soldagem e muitas outras, garantindo uma visão diversificada e abrangente das aplicações robóticas.
3.A seção Add-ins permite que você explore os add-ins disponíveis, projetados para estender e personalizar as funcionalidades do RoboDK. Os Add-ins incluem Apps (baseados em Python) e Plug-ins (interface C++), tanto do RoboDK quanto de terceiros. Alguns Add-ins são opções pagas separadas que devem ser adicionadas ao software RoboDK.
4.A seção Posts permite que você navegue pela lista de pós-processadores disponíveis por padrão no RoboDK. Esses pós-processadores tornam os programas gerados pelo RoboDK compatíveis com diferentes robôs, controladores e máquinas CNC. Esses pós-processadores permitem que o RoboDK gere programas de robôs para controladores de robôs específicos. As opções populares incluem ABB, Fanuc, KUKA, Yaskawa Motoman, Staubli, Universal Robots e várias outras, garantindo a compatibilidade em um amplo espectro de plataformas robóticas.
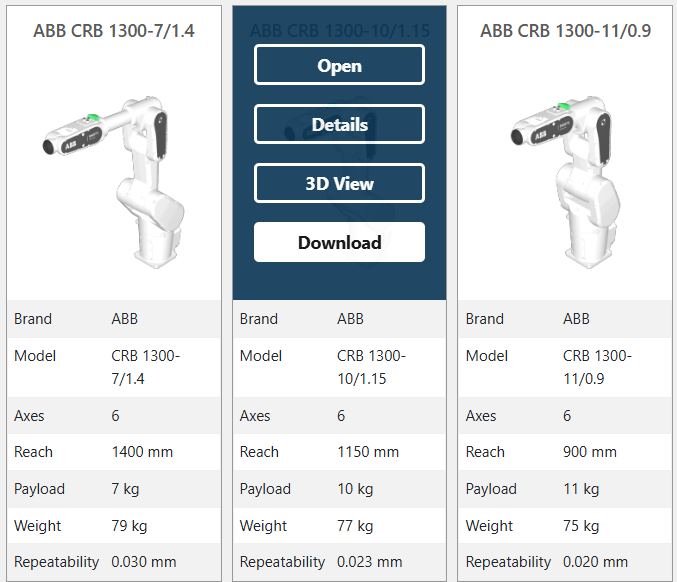
Ações da biblioteca
Um menu com algumas opções é exibido sobre os itens da biblioteca quando o mouse passa sobre a imagem.
Dependendo do conteúdo, as seguintes ações são possíveis:
1.Abrir: Abra diretamente o item em sua instância em execução do RoboDK Desktop.
2.Detalhes: Abrir uma nova guia com mais informações sobre o item.
3.Visualização 3D: Abra o item no RoboDK para Web, uma versão do RoboDK baseada na Web.
4.Download: Baixar uma cópia local do item.
Menu da barra de ferramentas
A barra de ferramentas do RoboDK contém ícones gráficos que permitem o acesso rápido às ações usadas com frequência no menu.
O RoboDK 5.7 e as versões mais recentes se beneficiam de ícones redesenhados, que podem ser ativados com Ferramentas ➔ Opções ➔ Geral➔ Usar ícones modernos. Mais informações na seção :Interface.
Os seguintes comandos estão disponíveis na barra de ferramentas por padrão.
Legado | Moderno |
|
|
| Abrir |
|
| Abrir a biblioteca on-line |
|
| Salvar estação |
|
| Desfazer |
|
| Refazer |
|
| Adicionar um frame de referência |
|
| Adicionar de um novo ponto |
|
| Ajustar tudo |
|
| Vista isométrica Exibir a visualização isométrica 3D padrão |
|
| Mover frames de referência |
|
| Mover TCP (ferramenta de robô) |
|
| Verificar colisões |
|
| Simulação rápida |
|
| Pausar a simulação |
|
| Adicionar Programas |
|
| Adicionar programas Python |
|
| Instrução de movimento joint |
|
| Instrução de movimento linear |
|
| Exportar Simulação |













Atalhos
Esta seção fornece atalhos úteis e seus botões equivalentes na barra de ferramentas.
Alt |
| Mover um frame de referência |
Alt+Shift |
| Mover um TCP (ferramenta) |
F1 |
| Mostrar este guia de ajuda |
F2 | Renomear item | |
F6 |
| Gerar o(s) programa(s) selecionado(s) |
F7 | Mostrar/ocultar item(ns) selecionado(s) | |
Alt+0 |
| Ajuste ao(s) item(ns) selecionado(s) |
Ctrl+1 | Carregar o último arquivo ou estação RoboDK | |
/ | Mostrar/ocultar texto na tela | |
+ | Aumentar os frames de referência | |
− | Tornar os frames de referência menores | |
* | Mostrar/ocultar o espaço de trabalho do robô |


Frames de referência
Um frame de referência define a localização de um item em relação a outro item com uma determinada posição e orientação. Um item pode ser um objeto, um robô ou outro frame de referência. Todos os programas de programação off-line exigem a definição de um frame de referência para localizar o objeto em relação a um robô para atualizar a simulação de acordo com isso.
Arraste e solte qualquer frame de referência ou objeto na Árvore de estações para definir um relacionamento específico, como o frame de referência aninhado mostrado na imagem a seguir.
É comum definir a localização de um ou mais frames de referência com relação ao robô tocando em 3 pontos. Isso permite colocar objetos no espaço virtual. O procedimento pode ser realizado usando o terminal de programação do robô ou o RoboDK (mais informações disponíveis na seção Calibrar Frame de referência).
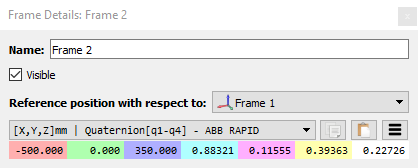
Com o RoboDK, é possível inserir manualmente os valores de translação e rotação, incluindo diferentes ordens de rotação dos ângulos de Euler.
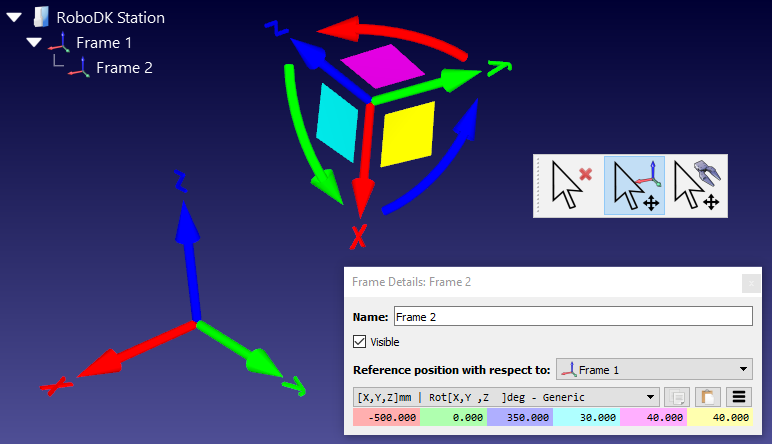
Por padrão, o RoboDK exibe a relação como a posição XYZ e os ângulos de Euler no formato X ➔ Y ➔ Z. Isso significa que a rotação é feita na seguinte ordem:
1.Primeiro: é feita uma rotação em torno do eixo X (caixa azul claro).
2.Segundo: é feita uma rotação em torno do eixo Y estático (caixa rosa).
3.Terceiro: é feita uma rotação em torno do eixo Z estático (caixa amarela).
Por exemplo, os controladores Fanuc e Motoman usam o formato descrito anteriormente; no entanto, outros fabricantes de robôs tratam a ordem de rotação de maneira diferente.
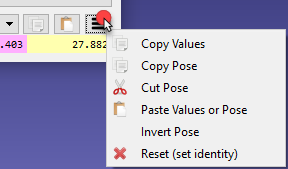
É possível selecionar entre diferentes formatos de orientação na lista suspensa da janela de detalhes do frame de referência (clique duas vezes em um frame de referência).
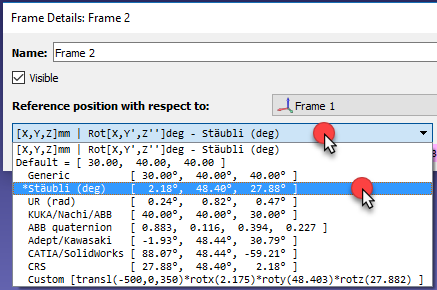
Por exemplo, os robôs Stäubli usam a ordem X➔ Y'➔ Z'', ou os robôs KUKA e Nachi usam Z➔ Y'➔ X''. Por outro lado, os controladores ABB usam valores Quatérnio, que exigem 4 valores para definir a rotação:
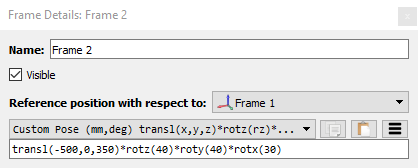
Também é possível inserir manualmente um formato personalizado. Por exemplo, o comando a seguir é exibido quando a opção Script (Custom Pose) é selecionada:
RoboDK para Web
O RoboDK para Web é uma versão do software RoboDK baseada na nuvem. Ele oferece a flexibilidade e a acessibilidade de uma plataforma baseada na Web, permitindo que os usuários simulem robôs de forma rápida e fácil sem a necessidade de instalar o RoboDK para Desktop.
O RoboDK para Web é uma versão leve do software RoboDK, adequada para simulações rápidas, para compartilhar seu projeto exportando suas simulações ou para aqueles que são novos no RoboDK e desejam experimentar seus recursos. Para projetos em escala industrial, simulações aprofundadas e funcionalidades avançadas, recomendamos o uso do aplicativo RoboDK para desktop.
Para acessar o RoboDK para Web:
1.Abra o navegador da Web de sua preferência.
2.Navegue até o URL do RoboDK para Web: https://robodk.com/web.
O RoboDK para Web compartilha quase os mesmos ícones que o RoboDK para desktop. Consulte a seção barra de ferramentas da documentação para obter mais informações.
Você também pode consultar o guia Iniciando para saber mais sobre as funcionalidades básicas do RoboDK.
Navegando na biblioteca
A Biblioteca Online do RoboDK pode ser acessada diretamente do RoboDK para Web ao clicar no ícone Abrir biblioteca online. Você verá uma janela com os robôs, as ferramentas e os exemplos disponíveis na biblioteca.
Para adicionar um item ao seu projeto, basta passar o mouse sobre o objeto e clicar em Open.
Clique duas vezes em um programa para iniciar a simulação. Você também pode carregar arquivos 3D do seu computador, criar novos pontos, simulações e gerar programas.
Definir configurações padrão
Selecione Definir configurações padrão no menu Ferramentas-Opções para definir as configurações padrão do RoboDK. Mais informações estão disponíveis na seção do menu Opções.
Selecione Ferramentas ➔ Idioma e selecione Português para alterar o idioma para Português.
Selecione Ferramentas ➔ Layout da Barra de Ferramentas ➔ Definir Barra de Ferramentas Padrão para configurar a barra de ferramentas padrão.
Selecione Ferramentas ➔ Opções ➔ Python➔ Definir configurações padrão do Python para definir as configurações padrão do Python. Para obter mais informações, consulte a seção API do RoboDK.
Solicitar suporte
Você pode solicitar suporte diretamente no software RoboDK, selecionando Ajuda ➔ Solicitar suporte.
Para obter mais informações sobre como configurar sua licença, consulte a seção de perguntas frequentes sobre licenças: https://robodk.com/lic-FAQ.
O fórum do RoboDK é uma comunidade ativa onde você pode fazer perguntas e obter respostas de um especialista do RoboDK.
A versão gratuita do RoboDK permite que você siga a maioria das etapas mencionadas na documentação. O uso de recursos avançados, como usinagem de robôs, projetos de soldagem de robôs, impressão 3D, recursos avançados de CAD para caminhos ou salvar simulações complexas requer a compra de uma licença. Você pode encontrar informações sobre os preços do RoboDK na seção de preços.
As licenças educacionais podem ser adquiridas somente por universidades ou escolas. Além disso, as licenças educacionais não devem ser usadas para fins de produção.
Requisitos do RoboDK
O RoboDK não tem requisitos especiais de hardware, pois pode ser executado na maioria dos computadores, incluindo sistemas baseados em Windows, Mac e Linux.
A lista a seguir mostra os requisitos de hardware recomendados:
1.Sistema operacional: Windows Vista, Windows 7, Windows 8, Windows 10 ou Windows 11 (versão de 32 bits ou 64 bits), Mac OS (64 bits), Ubuntu 16 ou Ubuntu 18 (64 bits).
2.Memória: mínimo de 2 GB. Recomendado 4 GB ou mais.
3.Configuração gráfica: Uma tela com resolução mínima de 1024x768 pixels. O driver gráfico deve ser compatível com OpenGL 3.0 ou posterior. Recomenda-se o uso de placas gráficas com OpenGL acelerado por hardware, incluindo memória interna. O suporte para gráficos não é necessário se você estiver executando o RoboDK como um processo.
4.Espaço na unidade de disco rígido: 15 GB, 1 GB livre.
5.Recomendação de mouse: 2 botões (mínimo), 3 botões ou 2 botões com a roda do meio do mouse é recomendado.
6.Internet: A conexão com a Internet é necessária para ativar as licenças de rede (licenças padrão). Os firewalls não devem bloquear as portas 80 e 443 (somente licenças de rede). Como alternativa, você pode solicitar uma licença por dongle USB.
7.Alguns recursos podem exigir a instalação de software adicional no mesmo computador. Por exemplo, alguns drivers exigem opções especiais pagas vendidas pelo fabricante do robô. Além disso, como outro exemplo, o software ROBOGUIDE da FANUC é necessário para converter os arquivos LS em arquivos TP caso o seu robô FANUC não tenha a opção "ASCII Upload".
A calibração do robô, o teste de desempenho e outras opções que exigem sistemas de medição externos não estão incluídos na licença padrão do RoboDK. Esses recursos são vendidos como opções separadas, incluindo atualizações e suporte. As licenças do RoboDK não incluem nenhum sistema de medição ou hardware de qualquer tipo.
Solucionar problemas
O RoboDK pode não iniciar ao usar uma conexão de Área de Trabalho Remota ou se você estiver executando o RoboDK em uma Máquina Virtual. Para resolver esse problema, você pode iniciar o RoboDK clicando duas vezes no arquivo RoboDK-Safe-Start.bat localizado na pasta C:/RoboDK/.
Iniciar o programa com esse comando resolve qualquer problema ao executar o RoboDK usando uma conexão de Área de Trabalho Remota ou uma Máquina Virtual.
Visite a seção de solução de problemas de conexão do robô para corrigir problemas relacionados à comunicação entre o PC e o robô.