Exportando sua simulação do RoboDK para o Blender
Esta seção mostra como você pode exportar sua simulação no RoboDK para o Blender.
Siga estas etapas para exportar sua simulação do RoboDK:
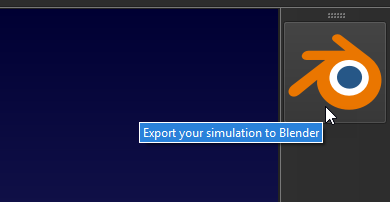
1.Clique no ícone de exportação do Blender no lado direito da tela
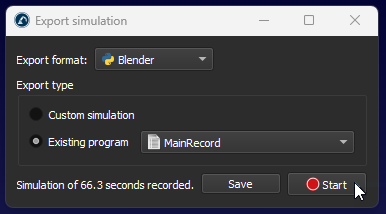
2.Selecione " Programa existente " e escolha seu programa de sequência principal
3.Clique em "Iniciar" para começar a gravar
4.Quando o programa terminar, aparecerá uma janela, escolha a pasta que Você criou anteriormente e clique em "Salvar"
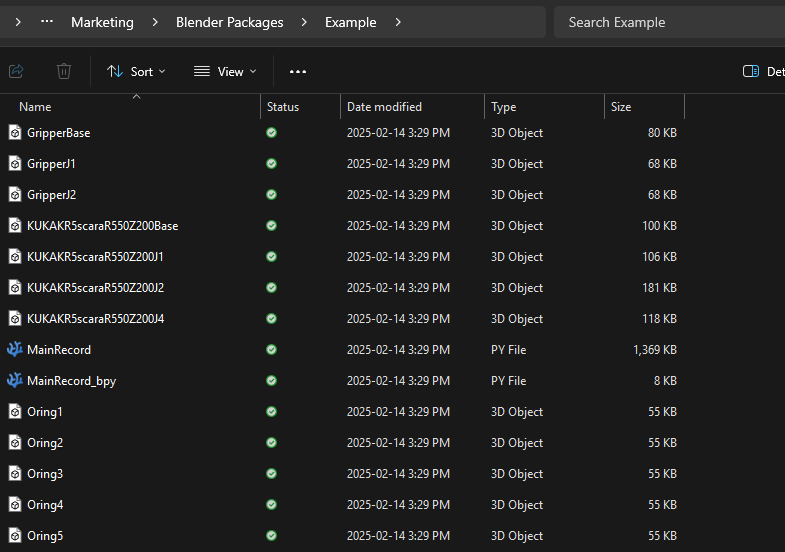
Para importar a simulação exportada do RoboDK para o Blender, siga estas etapas:
1.Abrir o Blender.
2.Use o modelo padrão "Geral" e exclua os objetos incluídos (o cubo).
3.Opcionalmente, abra o console do sistema Janela ➔ Ativar Console do Sistema
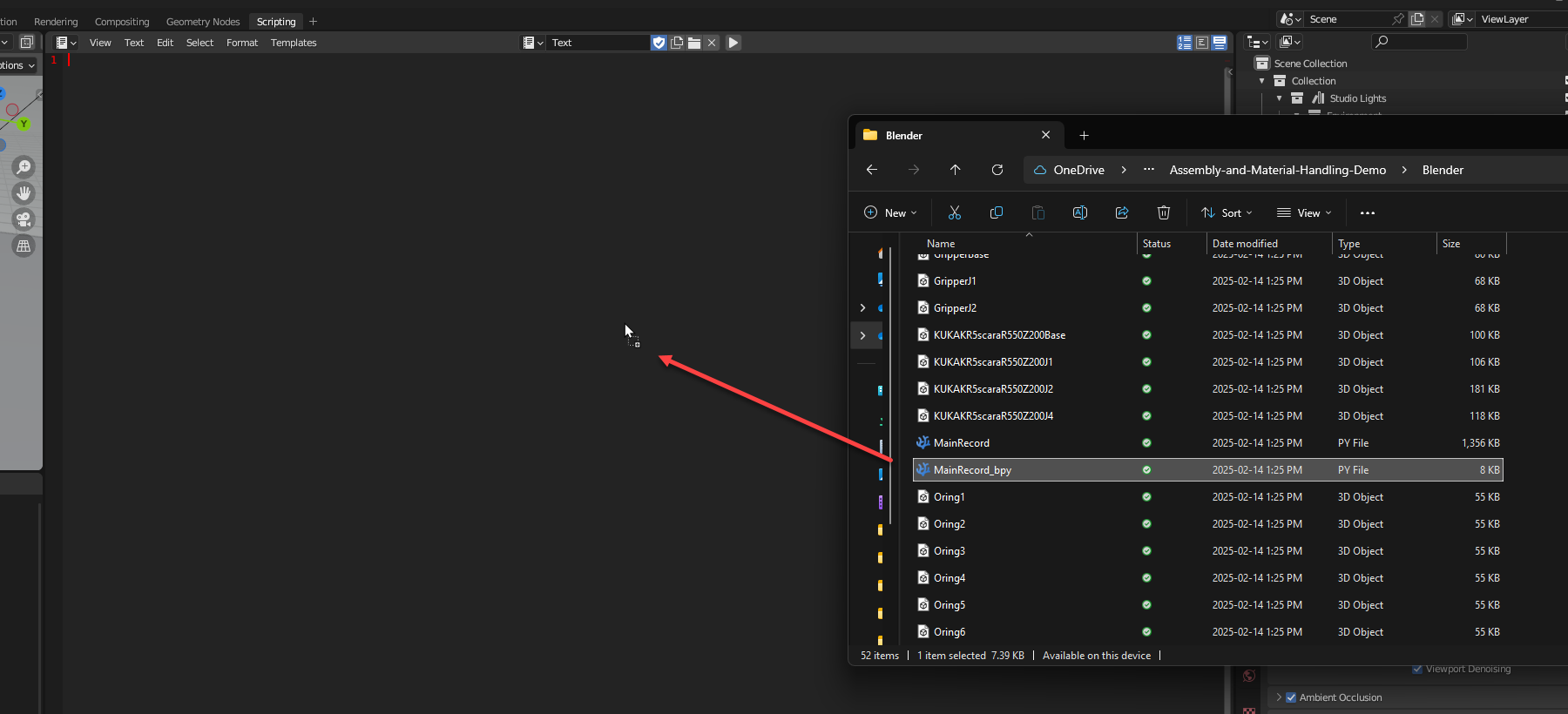
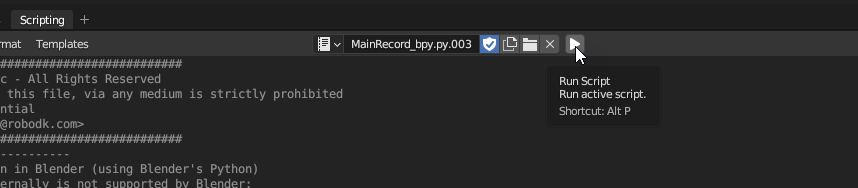
4.Navegue até a exibição de scripts e abra o arquivo Python que termina com "_bpy.py",+➔ Geral ➔ Scripts ➔ Abrir.
5.Execute o script com Scripts➔ Executar Script ou Alt+P.
6.Aguarde a conclusão do script (verifique se há atividade no console do sistema). Dependendo do tamanho da simulação, esse processo pode levar alguns minutos.
Verificar se a exportação/importação do Blender funcionou como planejado:
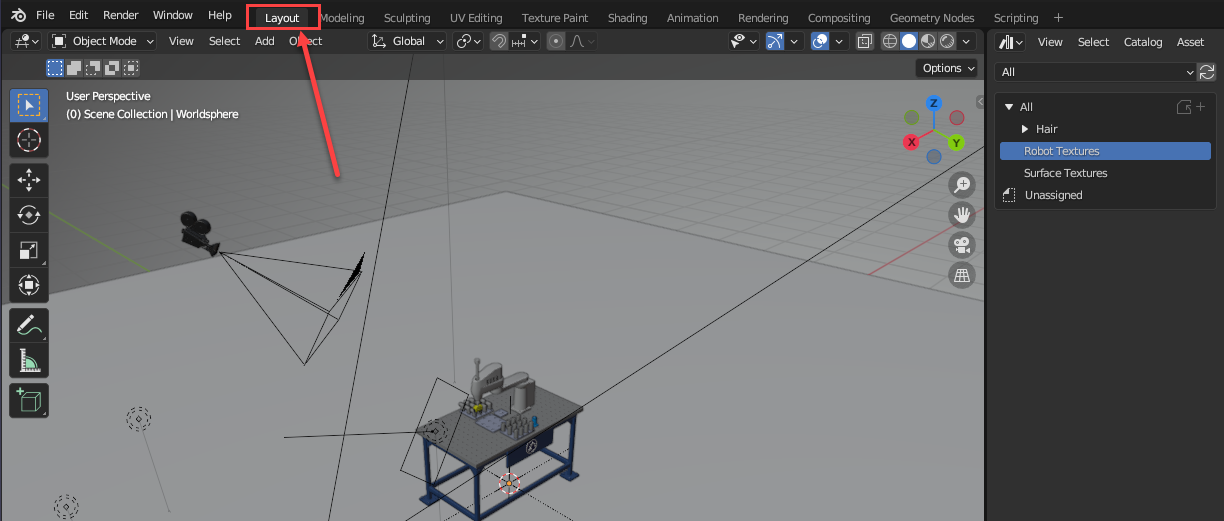
1.Vá para a guia "Layout" e você verá a estação do robô no centro
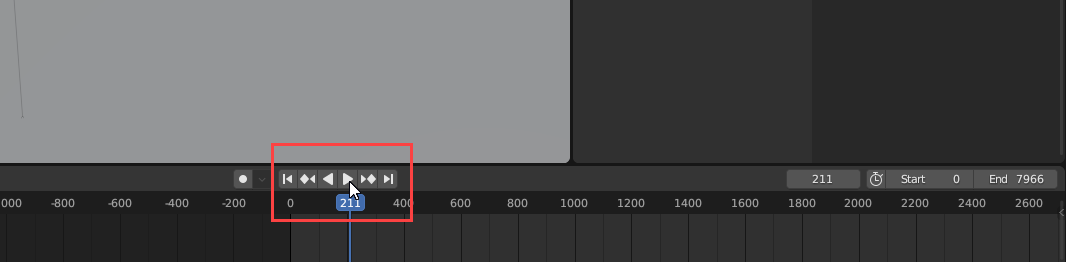
2.Procure o botão "Executar" na parte inferior da tela e clique nele
3.O robô deve começar a se mover. Se não for o caso, volte às etapas de exportação e importação para se certificar de que você não perdeu nenhuma etapa.