Conecte o robô
Utilize a seta para baixo no botão Vincular robô para abrir um menu de robôs disponíveis e vincule a simulação a um deles. Se o botão estiver no estado selecionado (o robô está vinculado), pressioná-lo fará com que o robô se desconecte da simulação.
A ligação entre o robô e a simulação também pode ser feita usando o menu de contexto na árvore da estação.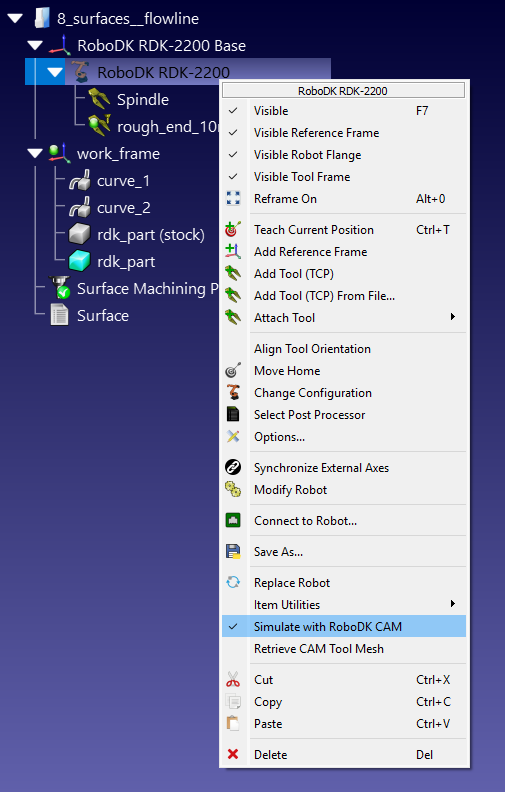
Depois que o robô estiver vinculado à simulação, quaisquer movimentos do robô na janela do RoboDK serão repetidos pelo simulador como movimentos da ferramenta. Independentemente da origem desse movimento: um programa RoboDK, um script Python ou movimento manual com o mouse.
Observação: o comando de ligação do robô também está disponível no menu CAM-Link Robot.