Navigation offcanvas
- Guia básico
- Primeiros passos
- Interface
- Menu Opções
- Programas de robôs
- Fabricação de robôs
- RoboDK CAM
- Introdução
- Tutorial de início rápido
- Instalar RoboDK CAM
- Biblioteca de ferramentas de corte
- Projeto CAM
- Estratégias de trajetória da ferramenta
- Superfícies – Cortes paralelos
- Superfícies – Cortes ao longo da curva
- Superfícies – Linha de fluxo
- Superfícies – Morph entre duas curvas
- Superfícies – Morph entre duas superfícies
- Superfícies – Paralelo a múltiplas curvas
- Superfícies – Paralelo à superfície
- Superfícies – Curva projetada
- Trimesh–Desbaste
- Trimesh – Cortes paralelos
- Trimesh–Curva de projeto
- Trimesh – Z constante
- Trimesh–Cúspide constante
- Trimesh–Flatlands
- Trimesh–Pencil
- Trimesh–Trochoidal
- Wireframe–Perfilagem de 5 eixos
- Contorno
- Rebarbação
- Furação
- Geodésico
- Multieixos
- Simulação de remoção de material
- Configurações
- Dicas e truques
- Dicas gerais
- Add-ins
- Plugins for CAD/CAM
- Add-Ins do RoboDK para Software CAD/CAM
- RoboDK Plugin for BobCAD-CAM
- RoboDK Plugin for FeatureCAM
- RoboDK Plugin for FreeCAD
- Add-In do RoboDK para Fusion 360
- RoboDK Plugin for hyperMILL
- Add-in do RoboDK para o Inventor
- RoboDK Plugin for Mastercam
- RoboDK Plugin for MecSoft
- Add-in do RoboDK para Onshape
- Add-in do RoboDK para Rhino
- RoboDK Add-in for Siemens Solid Edge
- Add-in do RoboDK para SolidWorks
- Detecção de colisão
- Examples
- Robot Tips
- Pós-processadores
- Realidade virtual
- API do RoboDK
- Motoristas de robôs
- Accuracy
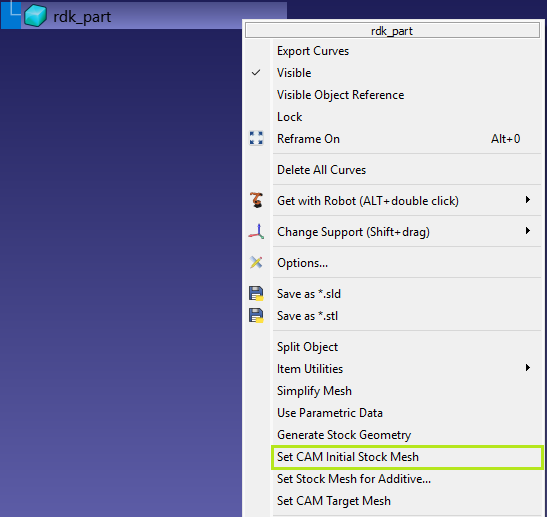
Clique com o botão direito do mouse no objeto de estoque na árvore da estação RoboDK e selecione Definir malha inicial de estoque CAM.
Observação: o processo de especificação do objeto de estoque pode levar um tempo considerável e não pode ser interrompido. Certifique-se de que seu projeto esteja salvo antes de iniciar a conversão.