Projeto CAM
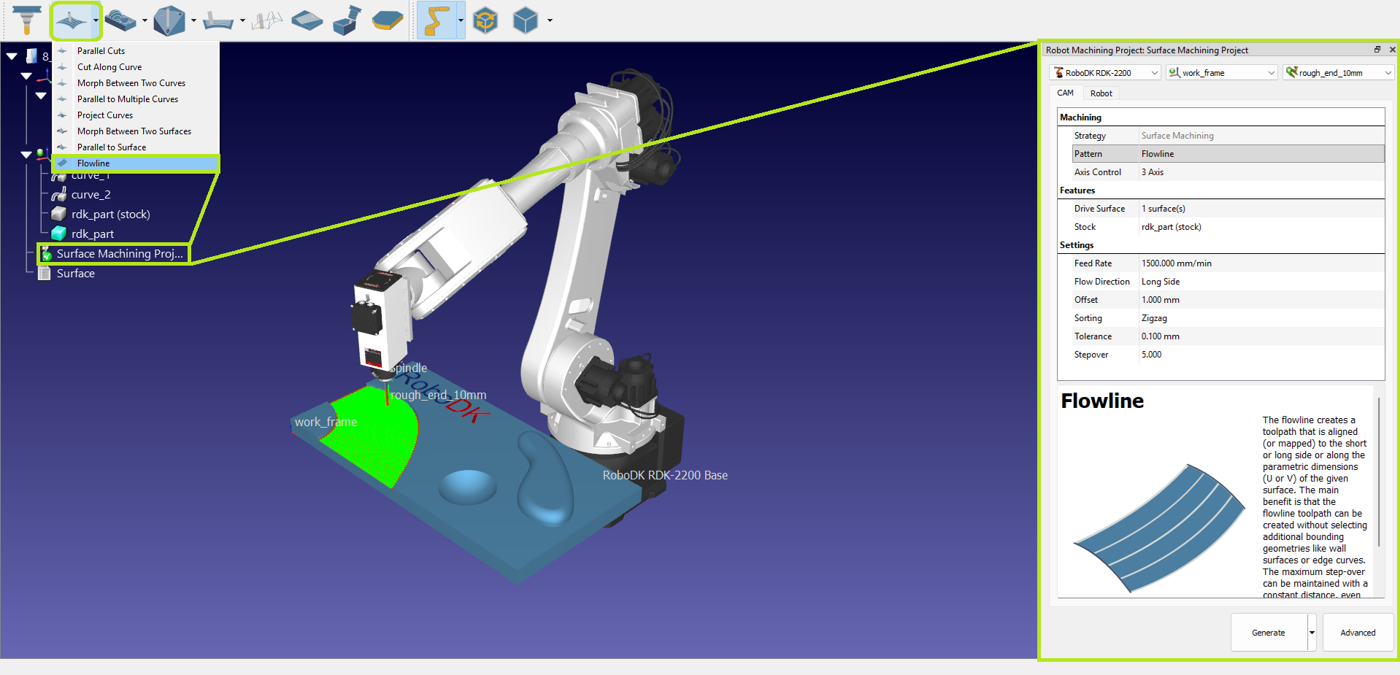
Na barra de ferramentas RoboDK CAM, é possível selecionar a estratégia de usinagem adequada para sua tarefa.

Após selecionar a estratégia necessária, o projeto CAM será criado automaticamente.
Configurações CAM
A janela de configurações do projeto CAM consiste em uma seção superior e nas guias CAM e Robô. O robô, o sistema de referência e o cortador são selecionados na seção superior da janela. Por padrão, os elementos ativos no momento da criação do projeto CAM são selecionados.

Guia CAM
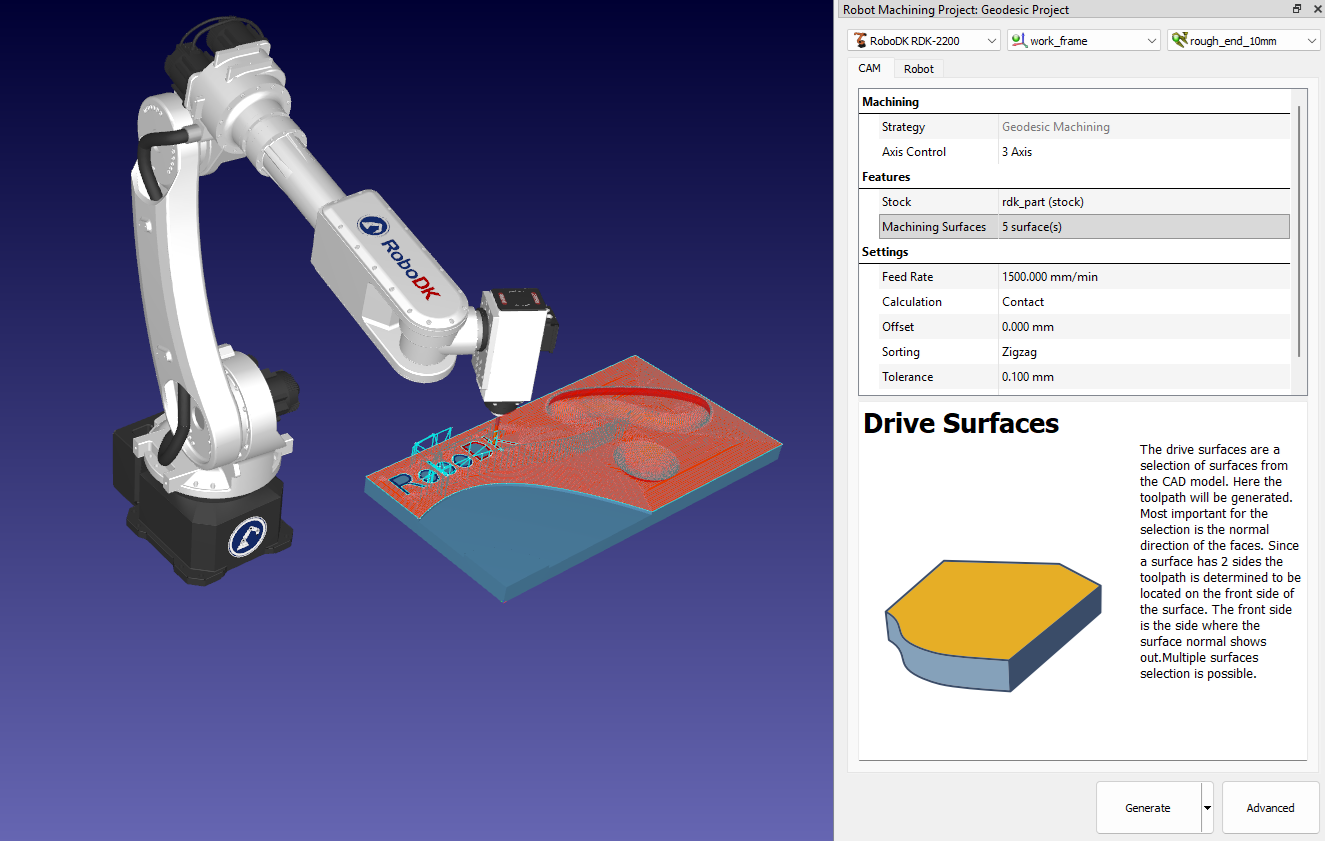
A guia CAM do menu do projeto CAM contém as configurações de usinagem e outras configurações de estratégia descritas nesta seção.
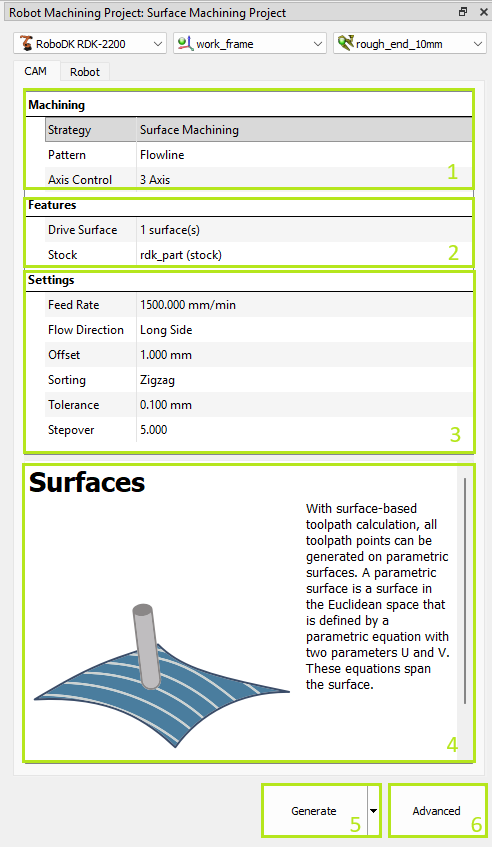
1.Configurações de usinagem – indica o grupo de estratégias selecionado e permite alternar entre padrões. Além disso, é possível selecionar o modo de controle dos eixos.
2.Configurações de recursos – indica os recursos selecionados da peça e do estoque. Essa seleção é obrigatória para o cálculo das trajetórias da ferramenta.
3.Configurações específicas da estratégia.
4.Dica – aparece ao clicar nos parâmetros.
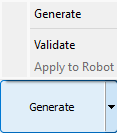
5.Botão de geração das trajetórias da ferramenta – calcula as trajetórias da ferramenta e as aplica ao robô selecionado. As subopções Validar e Aplicar ao robô permitem separar as ações de cálculo e aplicação para trajetórias da ferramenta complexas.
6.Configurações avançadas da estratégia.
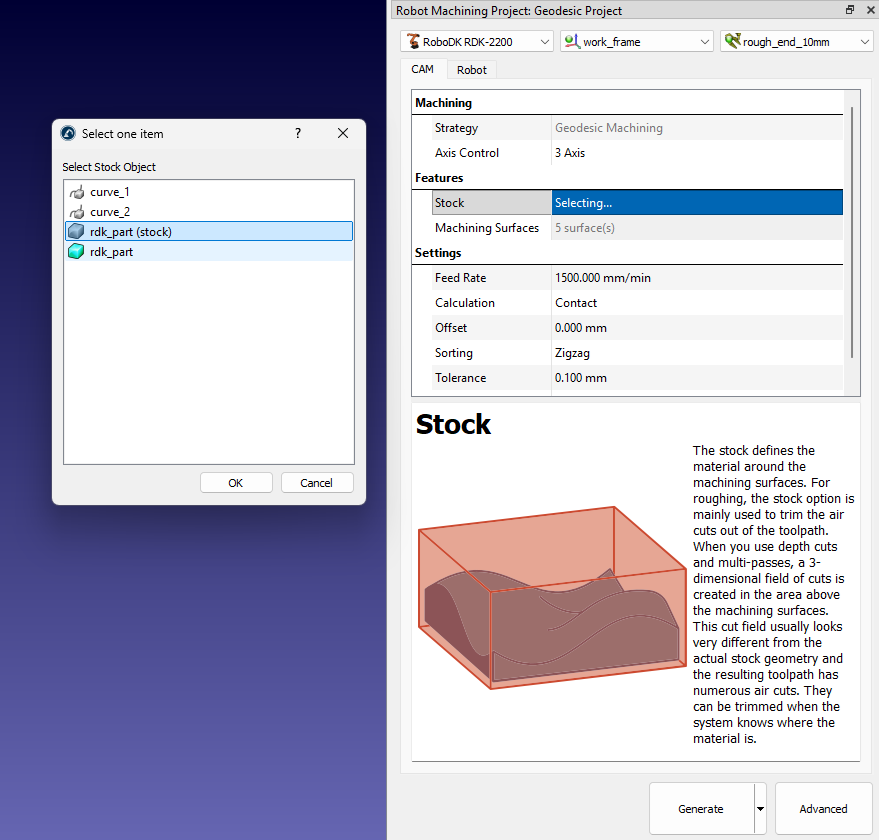
Seleção de recursos
Na seção Características, é possível selecionar as características geométricas necessárias para a estratégia. Dependendo da estratégia, é necessário selecionar superfícies, curvas ou pontos. A ferramenta seletora é iniciada clicando duas vezes na linha de configuração das características.
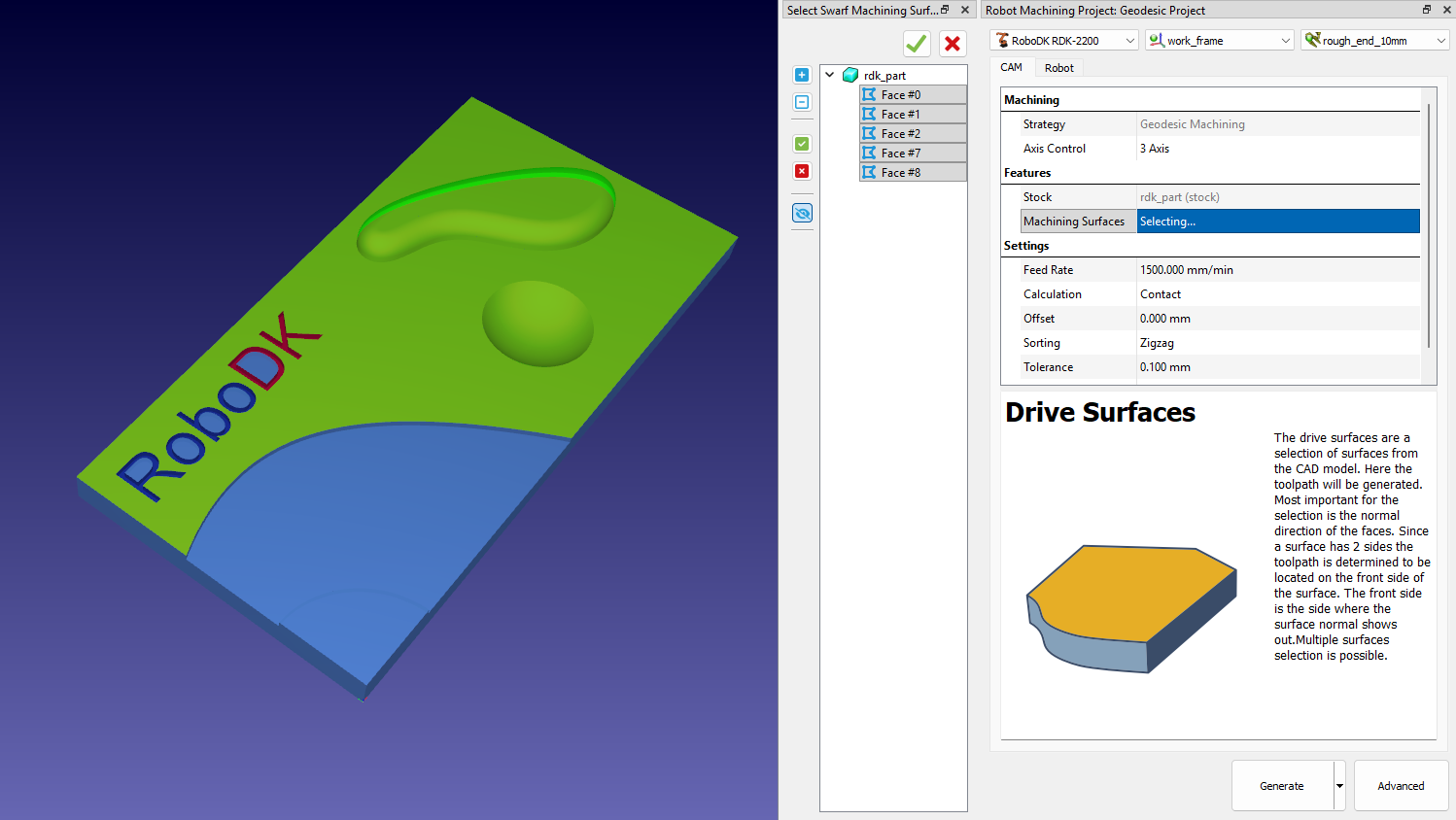

1.Aplicar seleção / Fechar seletor
2.Mostrar elementos da árvore
3.Selecionar tudo em árvores expandidas / Limpar seleção
4.Mostrar/ocultar todos os recursos
5.Visualização em árvore das características
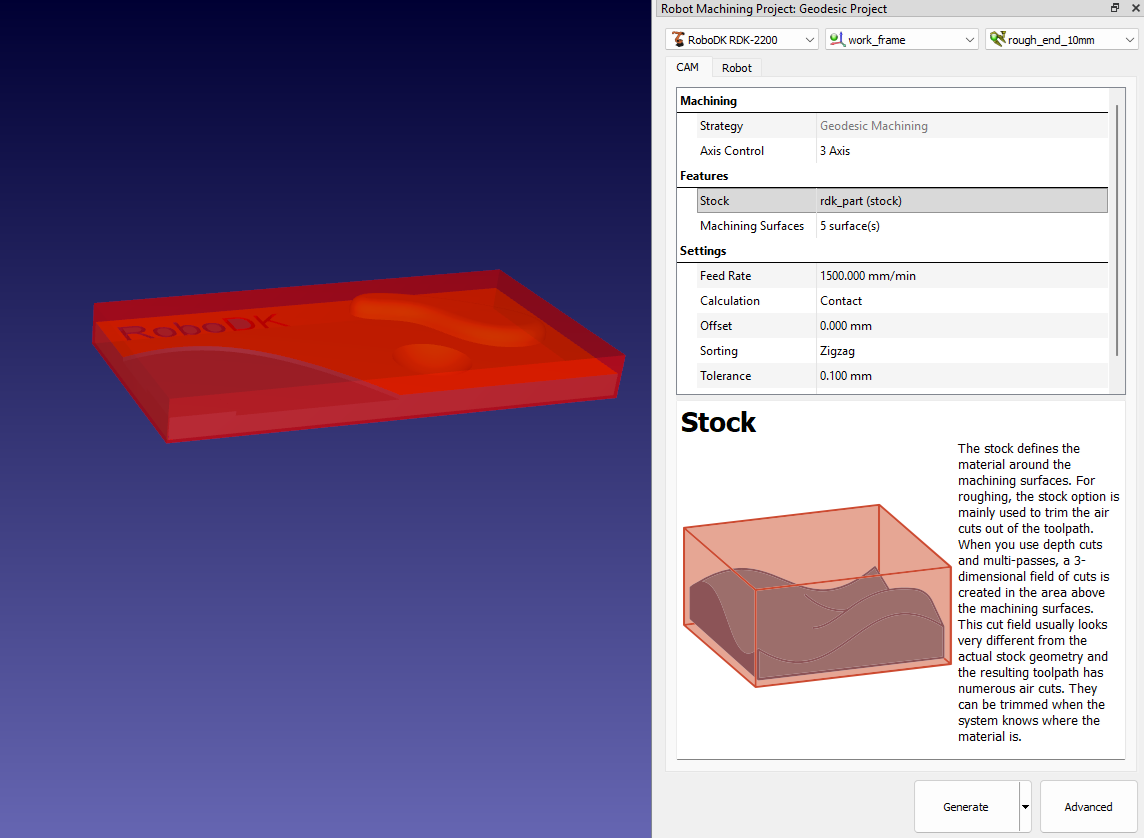
É possível verificar os recursos geométricos selecionados clicando na linha do seletor.
Além disso, é possível especificar o modelo que será utilizado como bruto.
Guia Robô
A guia Robô no menu do projeto CAM contém as configurações relacionadas ao movimento do robô.
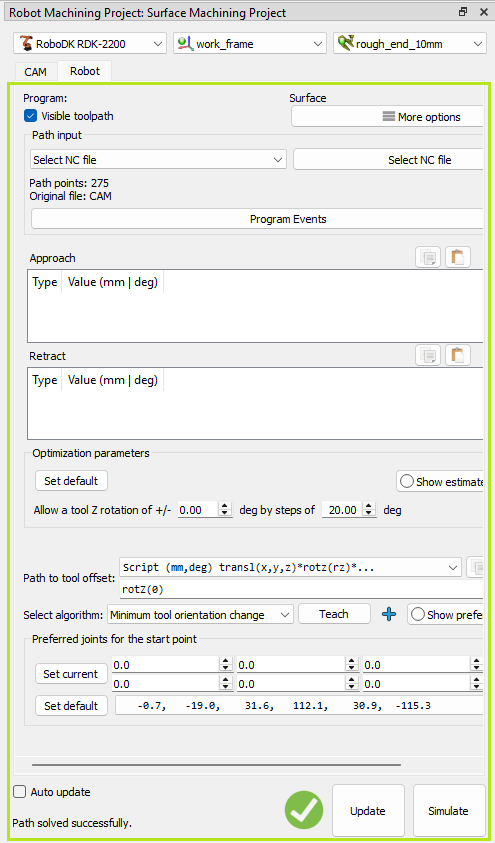
Essas configurações são as mesmas que você encontra nas configurações do Projeto de usinagem com robôs do RoboDK.