Simulação de remoção de material
A Simulação de remoção de material é uma visualização dinâmica passo a passo do processo de remoção de material. Ela fornece uma simulação detalhada de como uma ferramenta realiza o corte de uma peça ou peça bruta, permitindo que você observe cada etapa do processo de usinagem.
Você deve seguir estas etapas para simular corretamente a remoção de material com o RoboDK CAM:
1.A fresa deve ser definida.
2.Conecte o robô ou CNC se houver mais de um braço robótico na estação.
3.Especifique o objeto de estoque.
4.Habilite a simulação de corte. Caso contrário, a simulação será executada sem remoção de material.
Conecte o robô
Utilize a seta para baixo no botão Vincular robô para abrir um menu de robôs disponíveis e vincule a simulação a um deles. Se o botão estiver no estado selecionado (o robô está vinculado), pressioná-lo fará com que o robô se desconecte da simulação.
A ligação entre o robô e a simulação também pode ser feita usando o menu de contexto na árvore da estação.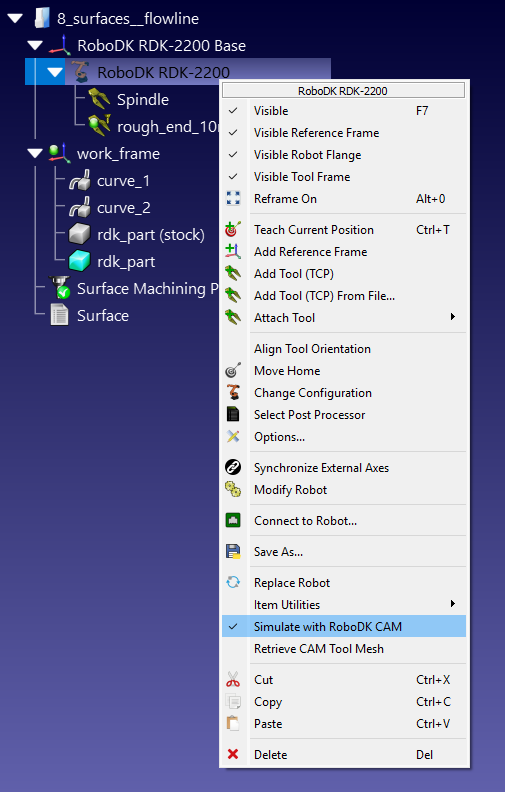
Depois que o robô estiver vinculado à simulação, quaisquer movimentos do robô na janela do RoboDK serão repetidos pelo simulador como movimentos da ferramenta. Independentemente da origem desse movimento: um programa RoboDK, um script Python ou movimento manual com o mouse.
Definição do objeto estoque
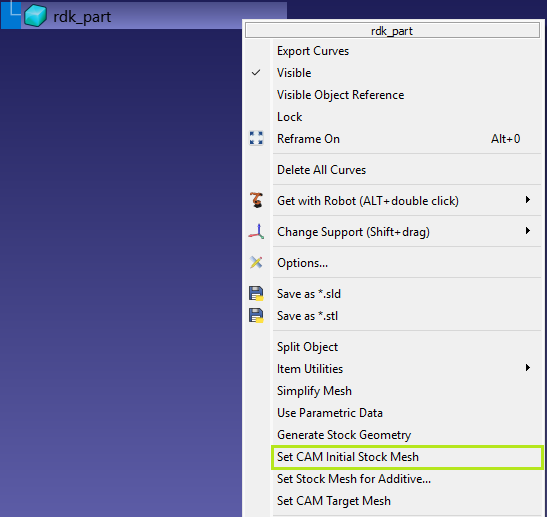
Clique com o botão direito do mouse no objeto de estoque na árvore da estação RoboDK e selecione Definir malha inicial de estoque CAM.
Geração do objeto estoque
Clique com o botão direito do mouse no objeto estoque na árvore da estação RoboDK e selecione Gerar geometria do estoque.
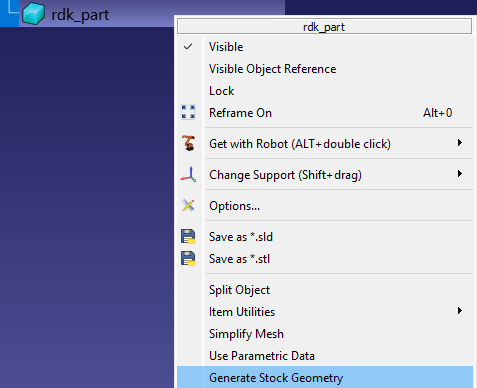
Este comando iniciará o utilitário de criação de estoque, que utiliza a forma original do modelo para o processo de geração.
Existem três métodos para gerar estoques:
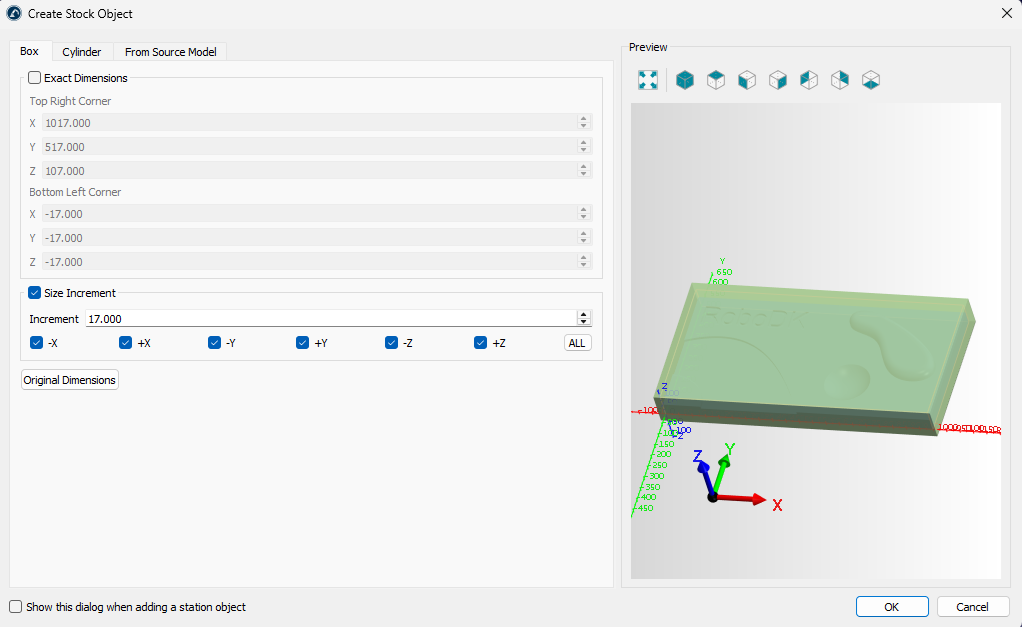
1.Caixa delimitadora – guia Caixa
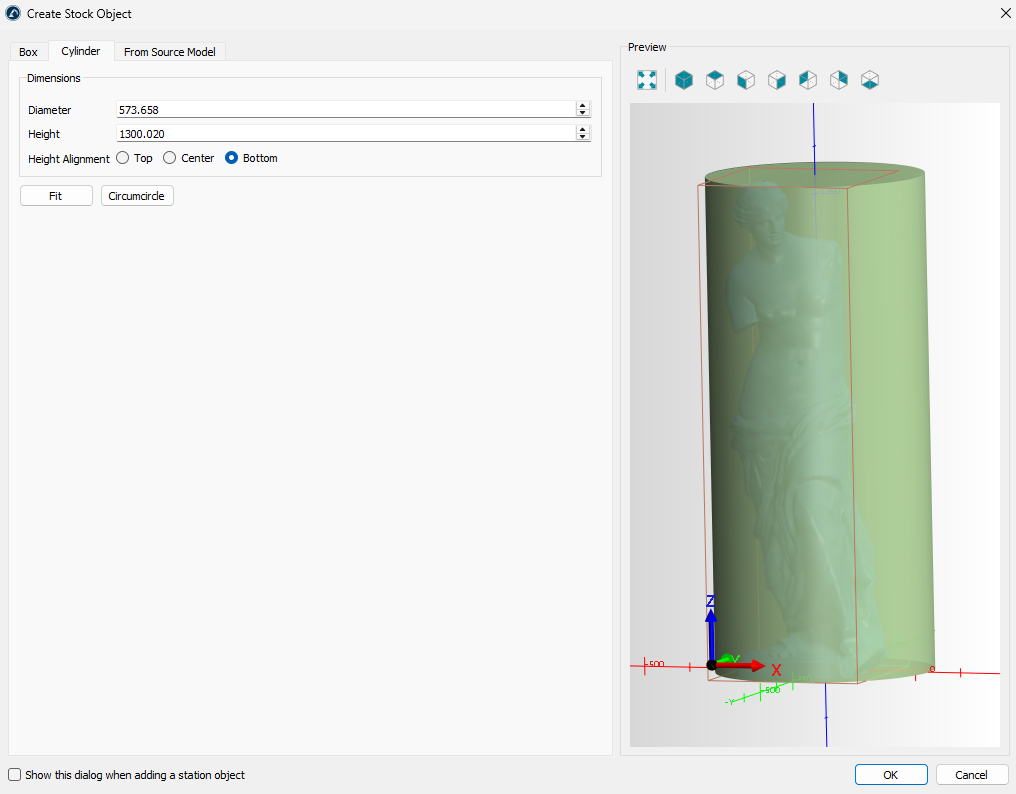
2.Cilindro delimitador – guia Cilindro
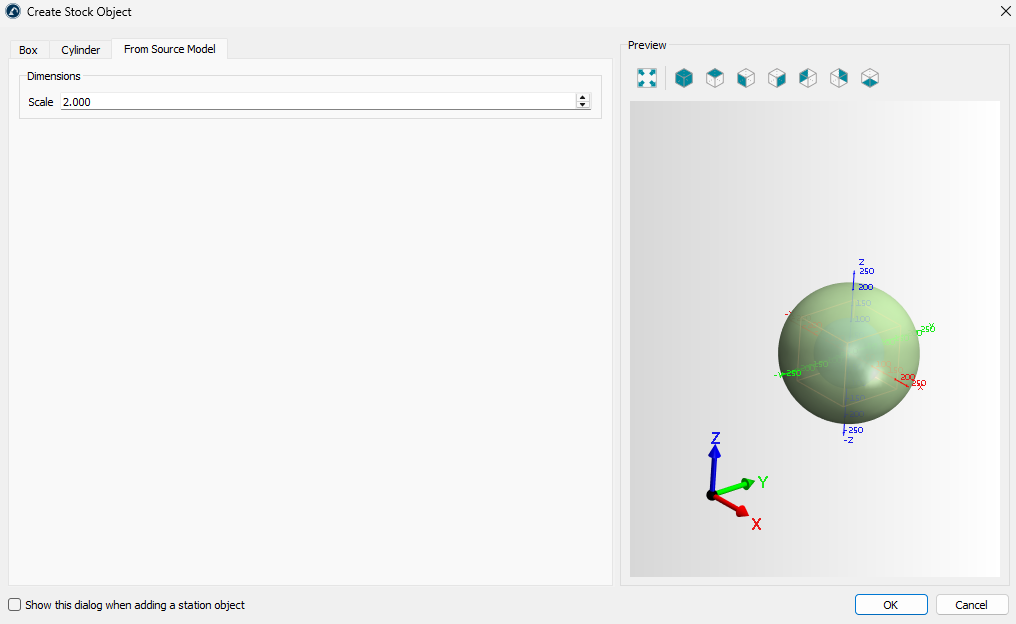
3.Escalonamento – guia Do modelo de origem
Na guia Caixa, é possível especificar as dimensões exatas da caixa delimitadora ou gerá-la extraindo (usando o botão Dimensões originais) e ampliando dimensões específicas.
A guia Cilindro permite criar um estoque na forma de um cilindro contendo o modelo original.
A guia Do modelo de origem permite criar um estoque na forma de um modelo original dimensionado.
Visualização do estoque
Quando a definição do estoque estiver concluída, o modelo de estoque de simulação será exibido acima dos outros modelos na cena do RoboDK. É possível controlar a visualização da simulação do estoque usando o submenu Visualização do estoque na barra de ferramentas:
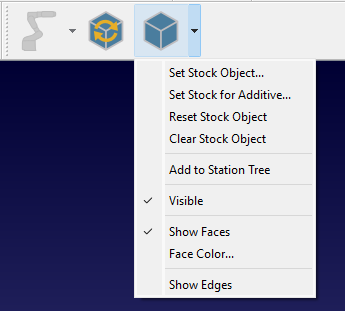
Definir objeto de estoque – defina/redefina um objeto de estoque.
Definir estoque para objeto aditivo – defina/redefina um objeto de estoque aditivo.
Redefinir objeto de estoque – reverta o estoque ao seu estado inicial.
Limpar objeto de estoque – excluir um objeto de estoque.
Adicionar à árvore da estação – copie o estoque em seu estado atual como modelo na árvore da estação do RoboDK.
Visível – alternar a visibilidade do estoque.
Mostrar faces – mostrar as faces do estoque bruto.
Cor da face... – defina a cor padrão para as faces.
Mostrar arestas – exibe as arestas do material bruto.
Ativar simulação de remoção de material
A simulação de remoção de material é ativada automaticamente. No entanto, é possível controlá-la manualmente usando o comando CAM-Ativar cortador/extrusora.
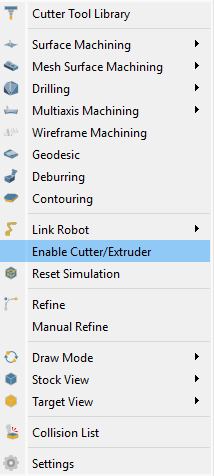
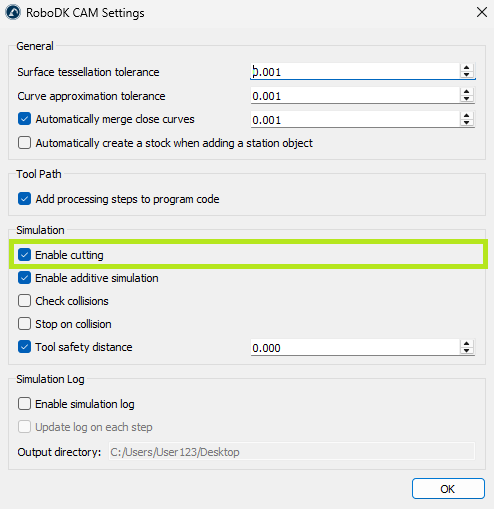
Além disso, é necessário verificar se a configuração CAM-Configurações-Simulação-Ativar corte está ativa.
Redefinir simulação
O comando de reinicialização da simulação reverte o bruto ao seu estado inicial.

Visualização do alvo
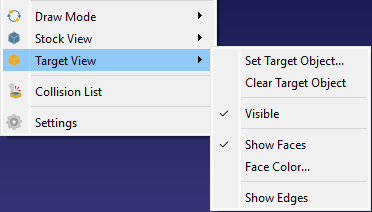
É possível comparar o estado atual do estoque com o modelo de alvo. Para isso, primeiro é necessário definir o modelo de alvo usando CAM-Visualização de destino-Definir objeto de destino e, em seguida, aplicar CAM-Modo de desenho-Mapa de desvio.
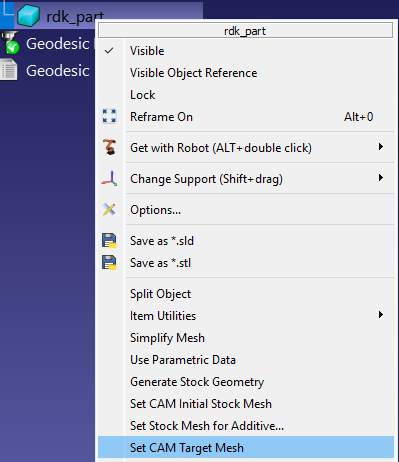
Para definir o objeto alvo, você também pode clicar com o botão direito do mouse no modelo na árvore da estação e selecionar o comando Definir Malha Alvo CAM.
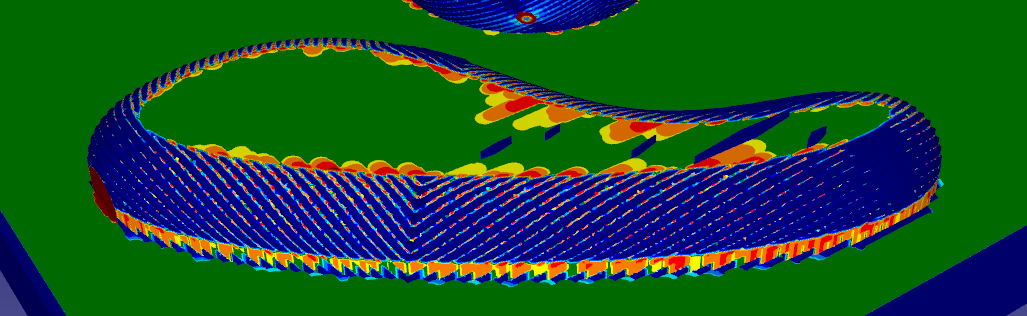
Mapa de desvio
O mapa de desvio mostra a diferença relativa usando uma escala de cores que varia do verde, indicando nenhuma diferença, ao vermelho, indicando a maior diferença.
Selecione CAM-Desenho Mode-Deviation Map para exibir o mapa de desvio.
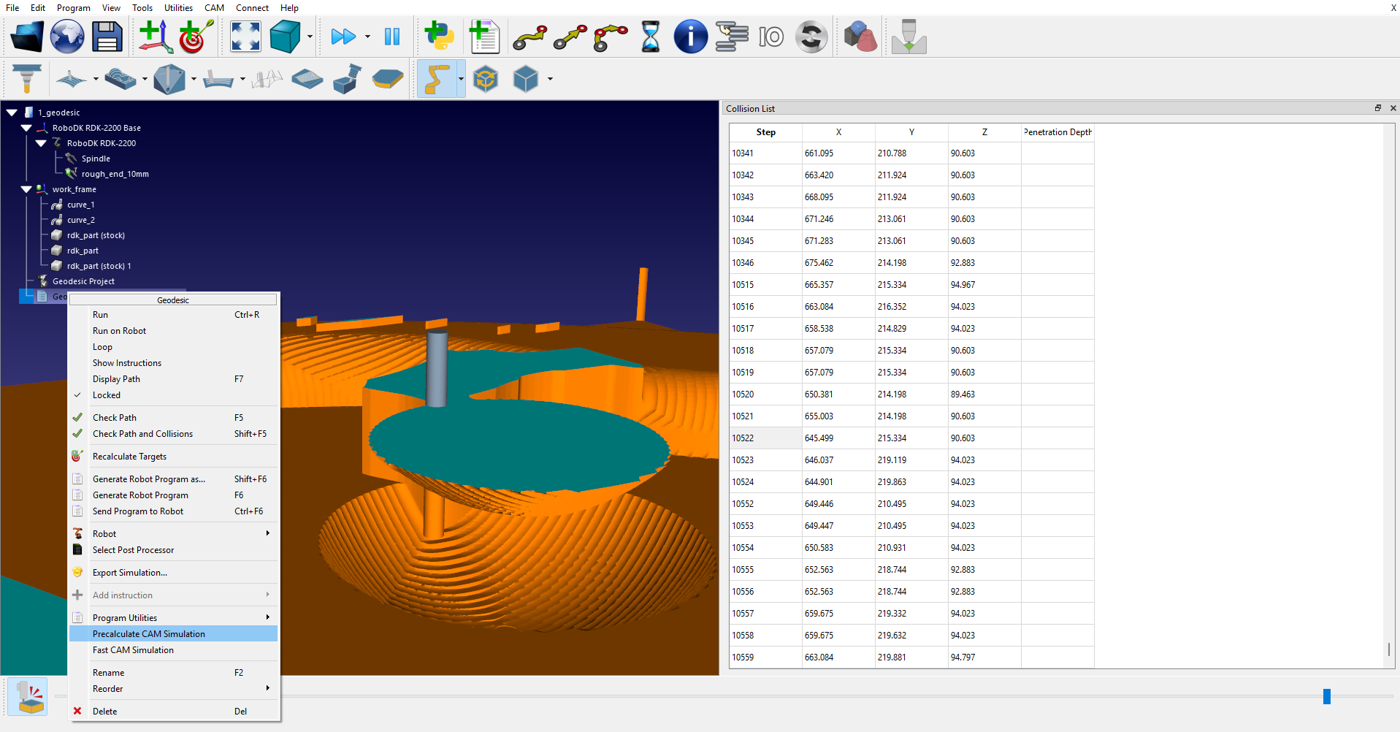
Lista de colisões
A lista de colisões mostra a sequência de colisões entre as partes não cortantes da ferramenta de corte (por exemplo, suporte) e a peça de trabalho durante a usinagem.
Selecione CAM-Lista de colisões para exibir a lista de colisões.
Refinar/Refinar manualmente
Com a opção Refinar ativada, é possível obter uma visualização da superfície de maior qualidade durante a simulação (isso pode afetar o desempenho da renderização).
Usando o comando Refinar manualmente, você pode melhorar a visualização das superfícies uma vez após pressioná-lo.

Selecione CAM-Refinar / CAM-Refinar manualmente para realizar a operação de refinamento.
Simulação CAM rápida
É possível executar uma simulação rápida da remoção de material. Para isso, clique com o botão direito do mouse no programa de alvo e selecione o comando Simulação CAM rápida.