RoboDK CAM
Introdução
O RoboDK CAM adiciona recursos de software CAM ao software RoboDK. O RoboDK CAM suporta diferentes processos de fabricação para robôs, CNCs e mecanismos personalizados no RoboDK. Esses processos de fabricação incluem fresagem, torneamento, corte, fabricação aditiva e muito mais. O RoboDK CAM também permite simular a remoção de material.
Os principais controles do RoboDK CAM estão localizados na barra de ferramentas que aparece após a instalação do Add-in:
Tutorial de início rápido
Este guia de início rápido fornece uma visão geral dos recursos do RoboDK CAM e o ajudará a se familiarizar com o RoboDK CAM para usinagem.
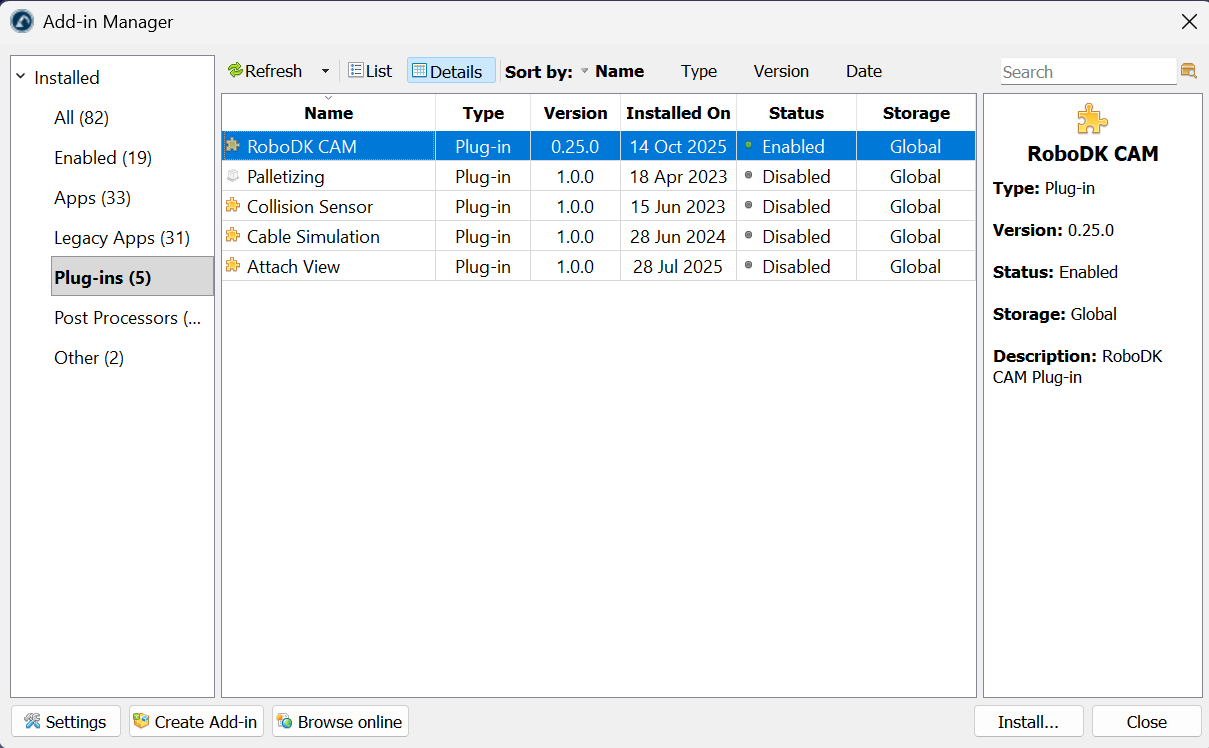
Instalar RoboDK CAM
Você pode instalar o RoboDK CAM como um Add-in abrindo o arquivo do pacote RoboDK CAM RDKP usando o RoboDK. Certifique-se de usar a versão mais recente do RoboDK.
O RoboDK CAM é compatível apenas com Windows.
Biblioteca de ferramentas de corte
A biblioteca de ferramentas de corte é uma coleção de ferramentas de corte para máquinas, ou fresas. Essas ferramentas ou cortadores são os que são acoplados à ferramenta principal do robô (por exemplo, o eixo).
Selecione CAM - Biblioteca de ferramentas de corte ou o ícone correspondente na barra de ferramentas CAM para exibir a biblioteca de cortadores.

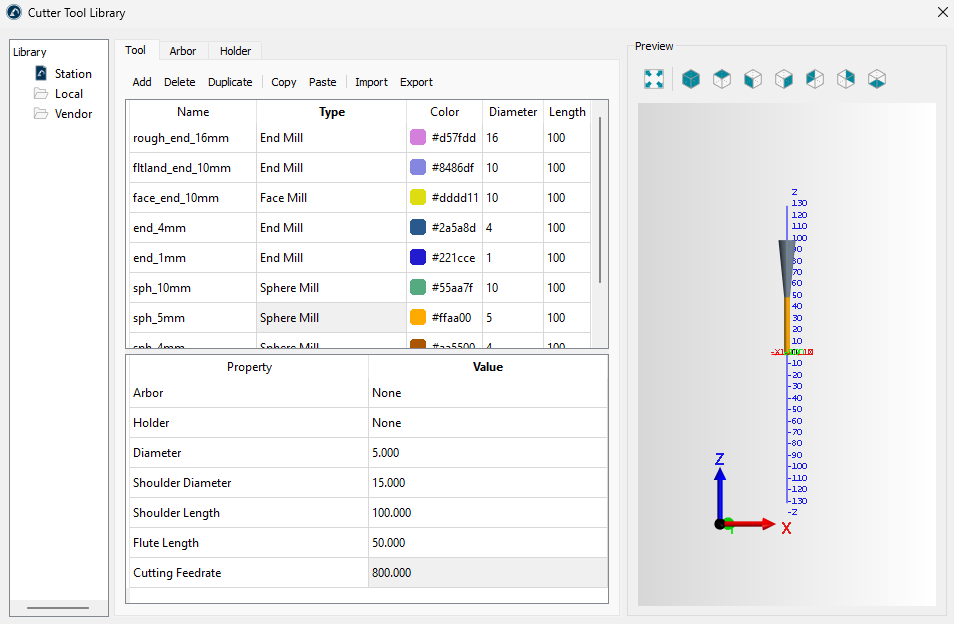
A janela da biblioteca contém três guias para especificar ferramentas, eixos e suportes em forma de tabela.
Se a sua estação RoboDK já contiver ferramentas robóticas (cortadores), elas serão exibidas na janela Biblioteca de ferramentas de corte. Se não houver cortadores na estação, é possível criá-los diretamente na janela Biblioteca de ferramentas de corte usando o botão Adicionar na guia Ferramenta.
Na parte superior da guia Ferramenta, é necessário definir o tipo de ferramenta. Aqui, você também pode renomear a ferramenta ou definir a cor da aresta de corte. Para alterar os campos correspondentes, clique duas vezes.
Na parte inferior da guia Ferramenta, os parâmetros da ferramenta atual são editados. Diferentes conjuntos de parâmetros estão disponíveis para diferentes tipos de ferramentas. Por exemplo, uma fresa de topo possui apenas três parâmetros principais: diâmetro, comprimento do ombro, comprimento da ranhura e velocidade de corte.
Os eixos e porta-ferramentas são definidos nas guias correspondentes da janela Biblioteca de ferramentas de corte.
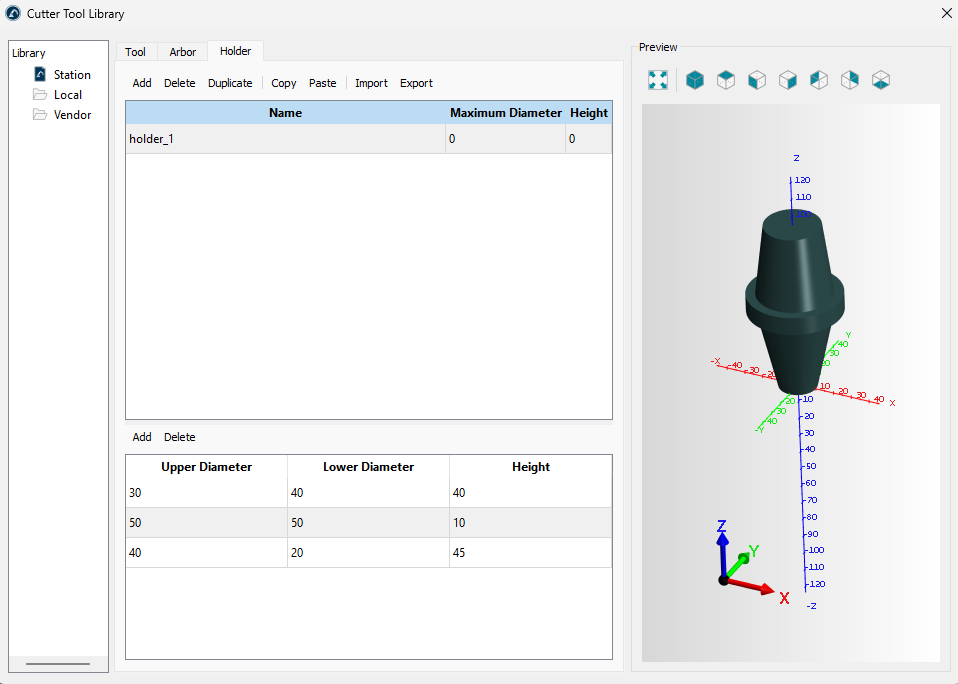
Um eixo ou porta-ferramenta é convencionalmente representado por um conjunto de cones unidos. A parte inferior da guia Eixo ou Porta-ferramenta permite especificar os parâmetros geométricos dos cones que compõem um eixo ou um porta-ferramenta, respectivamente. Várias ferramentas podem usar o mesmo porta-ferramenta ou eixo ao mesmo tempo.
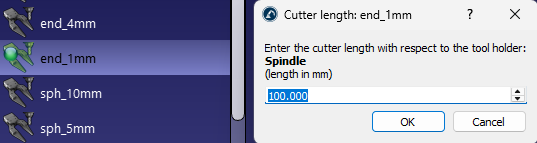
Uma ferramenta robótica com capacidade de corte também é uma fresa no RoboDK. Quando você tem uma fresa, pode ajustar o TCP ao longo do eixo Z do suporte:
Projeto CAM
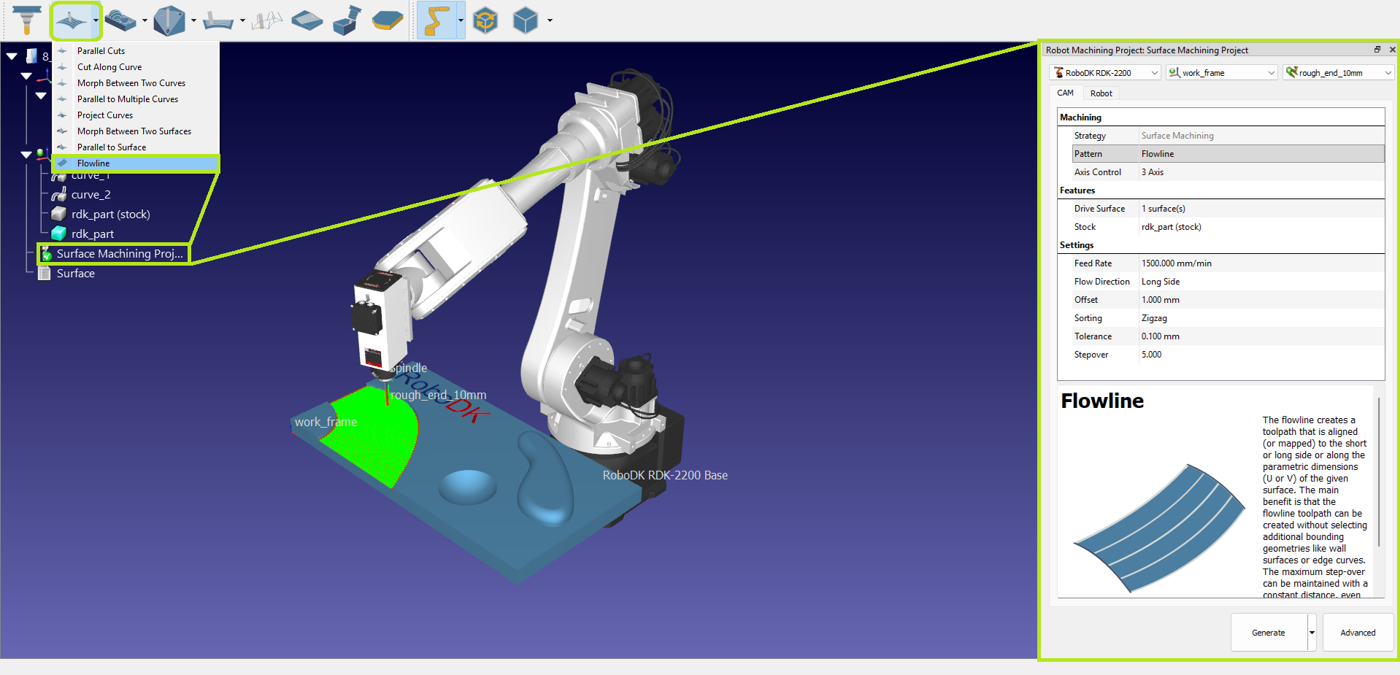
Na barra de ferramentas RoboDK CAM, é possível selecionar a estratégia de usinagem adequada para sua tarefa.

Após selecionar a estratégia necessária, o projeto CAM será criado automaticamente.
Configurações CAM
A janela de configurações do projeto CAM consiste em uma seção superior e nas guias CAM e Robô. O robô, o sistema de referência e o cortador são selecionados na seção superior da janela. Por padrão, os elementos ativos no momento da criação do projeto CAM são selecionados.

Guia CAM
A guia CAM do menu do projeto CAM contém as configurações de usinagem e outras configurações de estratégia descritas nesta seção.
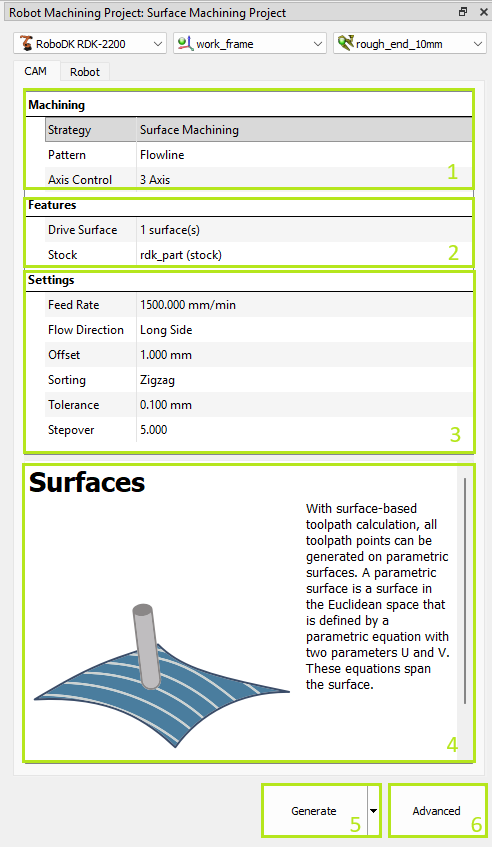
1.Configurações de usinagem – indica o grupo de estratégias selecionado e permite alternar entre padrões. Além disso, é possível selecionar o modo de controle dos eixos.
2.Configurações de recursos – indica os recursos selecionados da peça e do estoque. Essa seleção é obrigatória para o cálculo das trajetórias da ferramenta.
3.Configurações específicas da estratégia.
4.Dica – aparece ao clicar nos parâmetros.
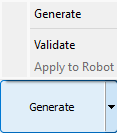
5.Botão de geração das trajetórias da ferramenta – calcula as trajetórias da ferramenta e as aplica ao robô selecionado. As subopções Validar e Aplicar ao robô permitem separar as ações de cálculo e aplicação para trajetórias da ferramenta complexas.
6.Configurações avançadas da estratégia.
Seleção de recursos
Na seção Características, é possível selecionar as características geométricas necessárias para a estratégia. Dependendo da estratégia, é necessário selecionar superfícies, curvas ou pontos. A ferramenta seletora é iniciada clicando duas vezes na linha de configuração das características.
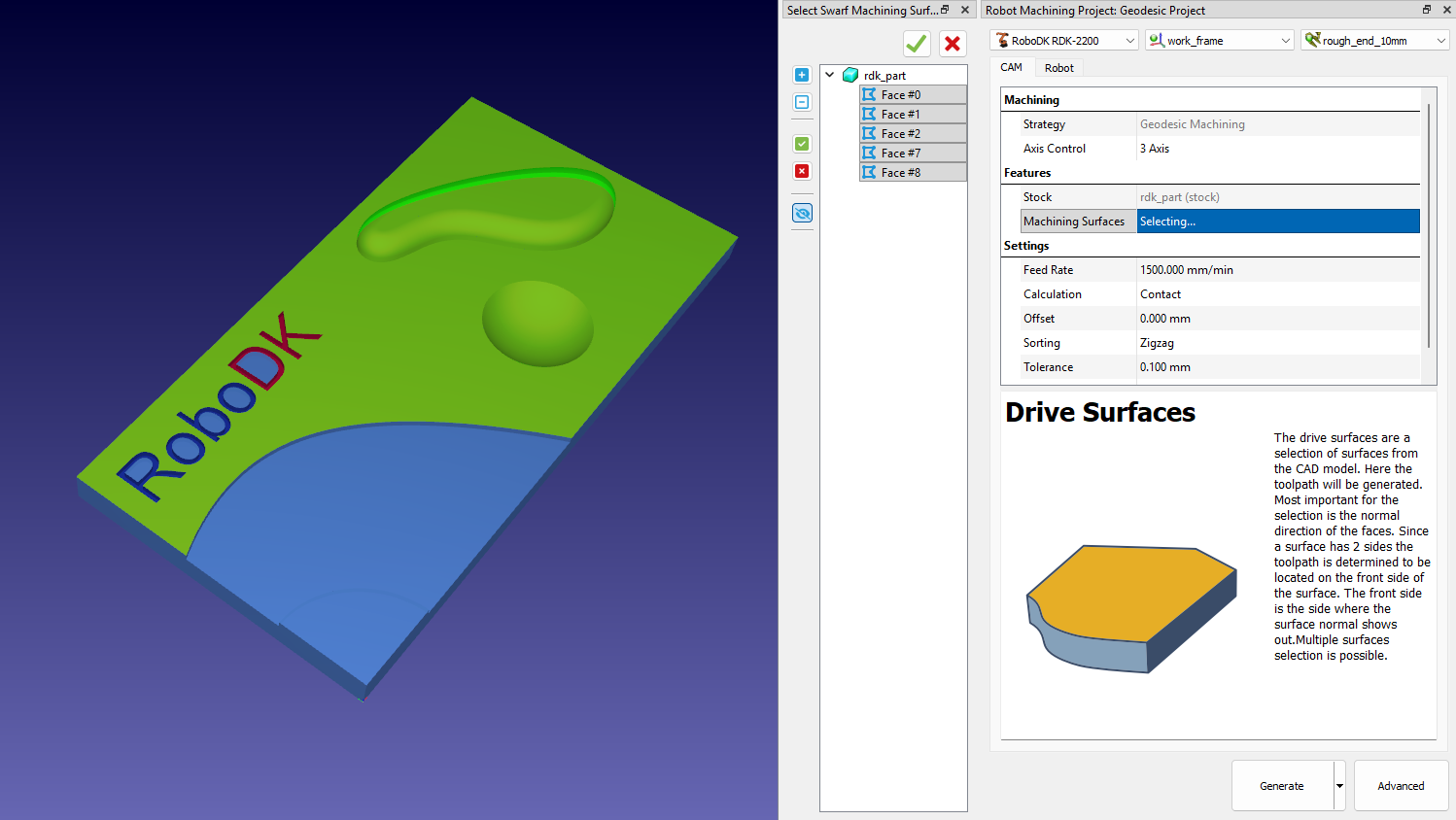

1.Aplicar seleção / Fechar seletor
2.Mostrar elementos da árvore
3.Selecionar tudo em árvores expandidas / Limpar seleção
4.Mostrar/ocultar todos os recursos
5.Visualização em árvore das características
É possível verificar os recursos geométricos selecionados clicando na linha do seletor.
Além disso, é possível especificar o modelo que será utilizado como bruto.
Guia Robô
A guia Robô no menu do projeto CAM contém as configurações relacionadas ao movimento do robô.
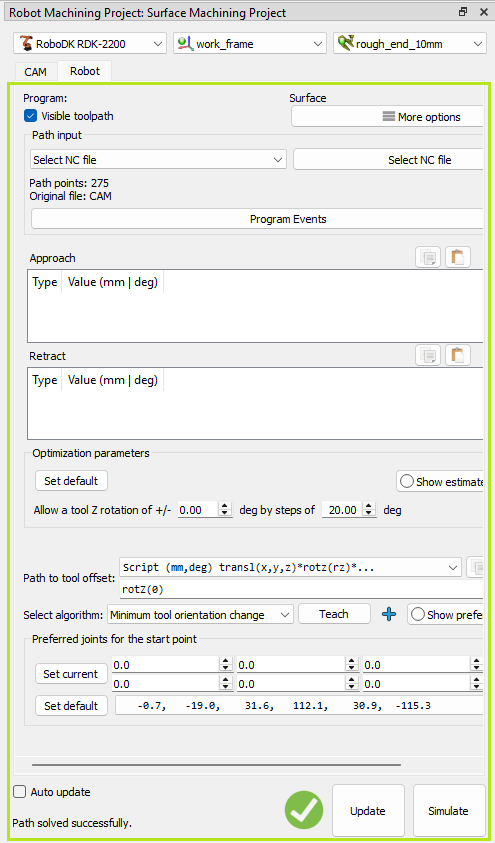
Essas configurações são as mesmas que você encontra nas configurações do Projeto de usinagem com robôs do RoboDK.
Estratégias de trajetória da ferramenta
O RoboDK CAM permite que você utilize estratégias de usinagem, como usinagem de superfície, furação, desbaste e outras. Além disso, é possível simular o processo de remoção de material.

Superfícies – Cortes paralelos
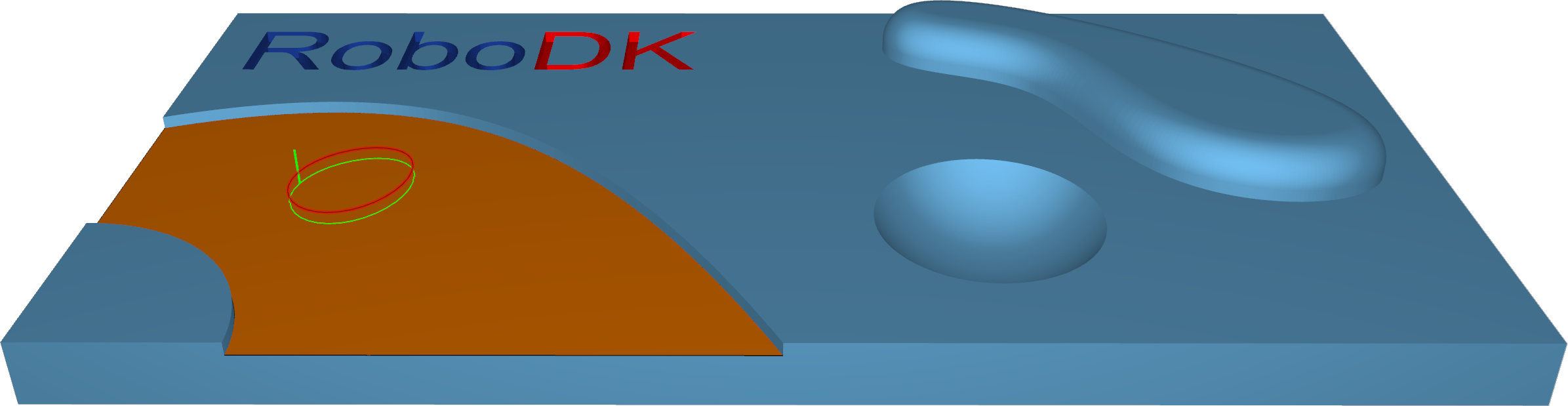
A opção Cortes paralelos cria um padrão de trajetória da ferramenta com cortes paralelos. A orientação dos cortes é definida por dois ângulos: X-Y (que realiza a rotação dos cortes em torno do eixo Z) e Z. Imagine cortar uma maçã: você pode cortá-la com uma faca paralelamente de cima para baixo ou da esquerda para a direita. As imagens na caixa de diálogo simbolizam como definir a direção de corte desejada usando os ângulos.
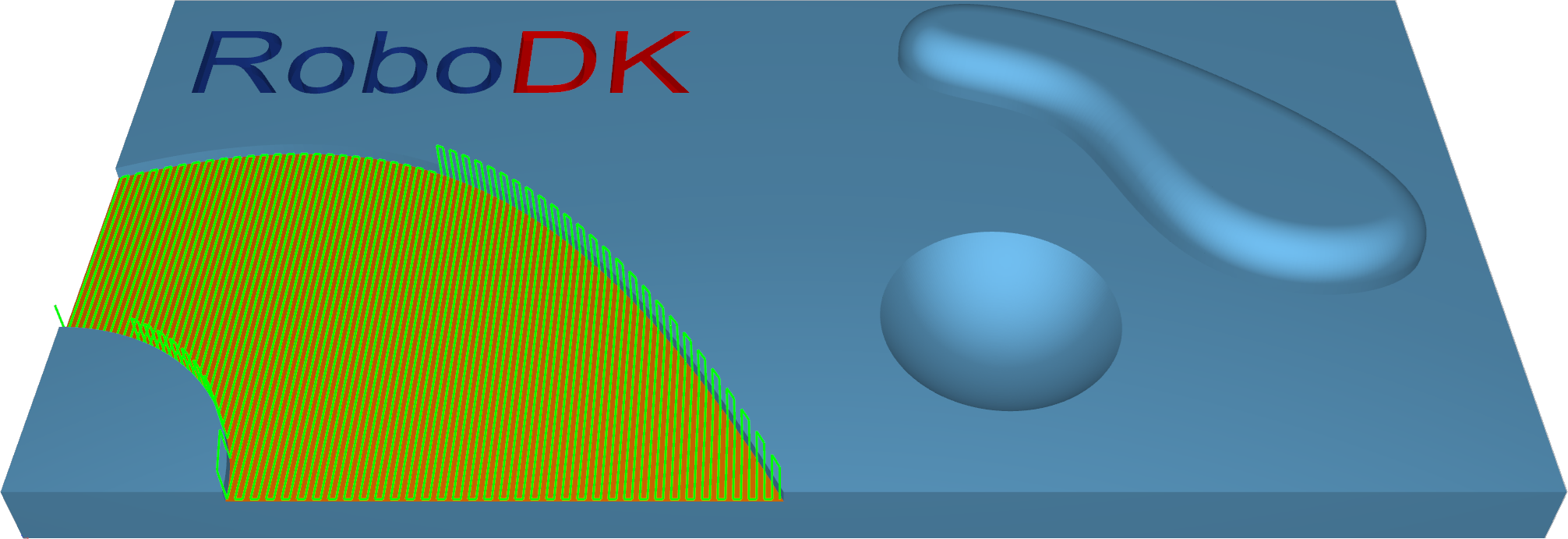
Estação: CAM-Superfícies-CortesParalelos.
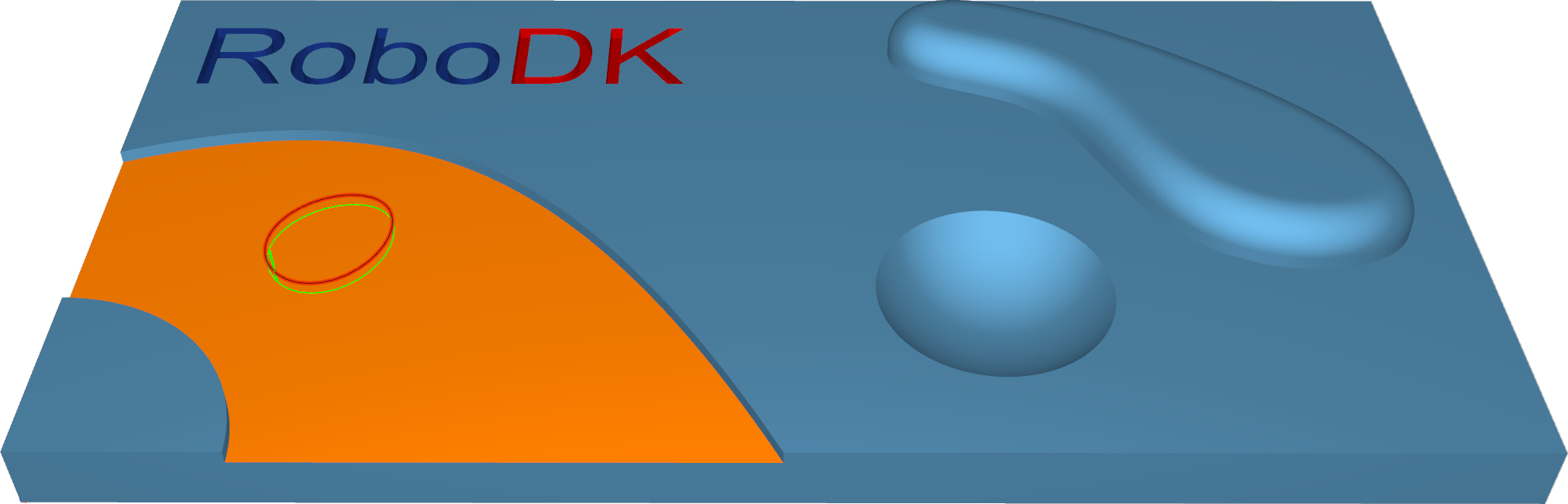
Superfícies – Cortes ao longo da curva
O padrão Cortes ao longo da curva permite ao usuário criar uma trajetória da ferramenta ortogonal a uma curva de acionamento. Isso significa que, se a curva selecionada como “Lead” não for uma linha reta, os cortes não serão paralelos entre si.
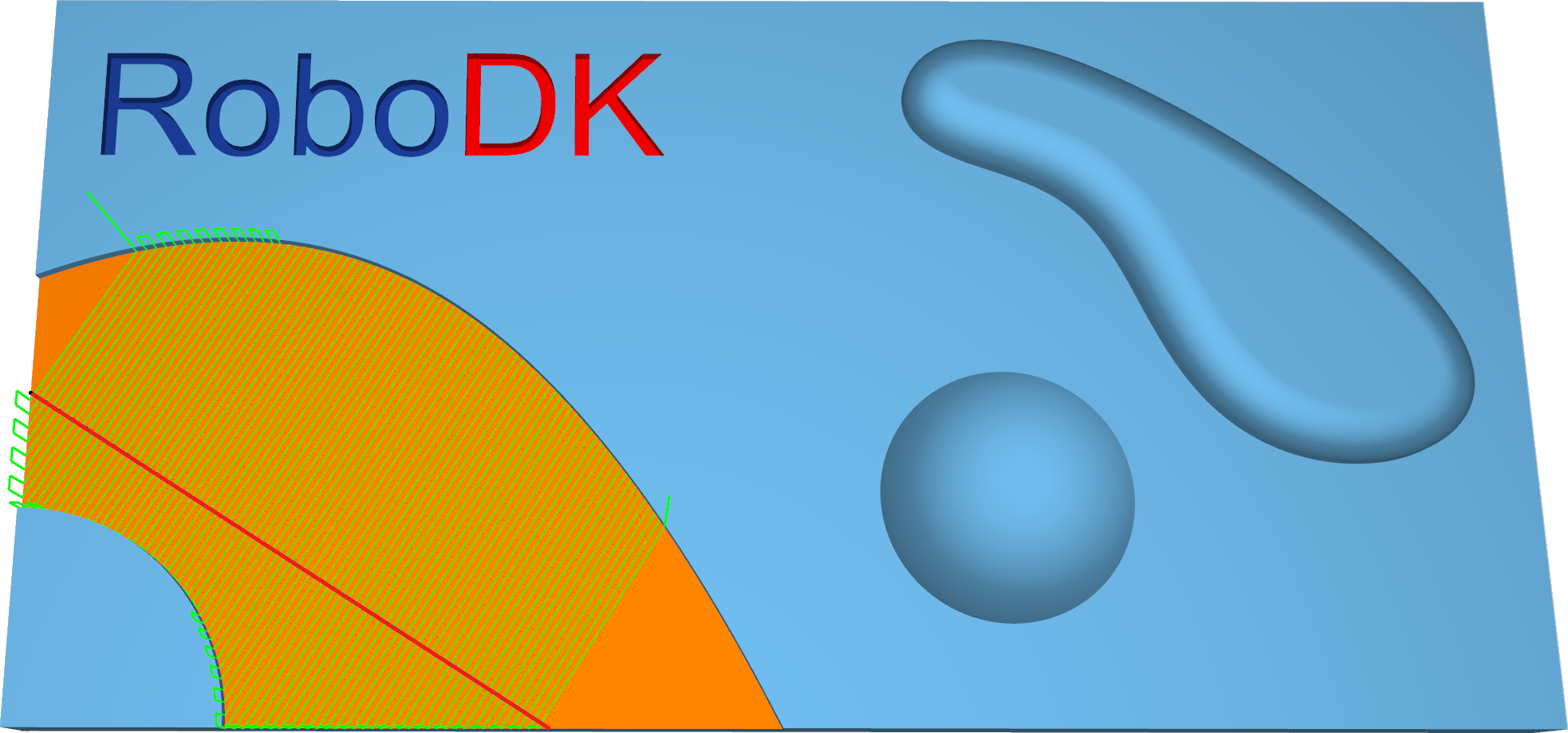
Estação: CAM-Superfícies-Corte ao longo da curva.
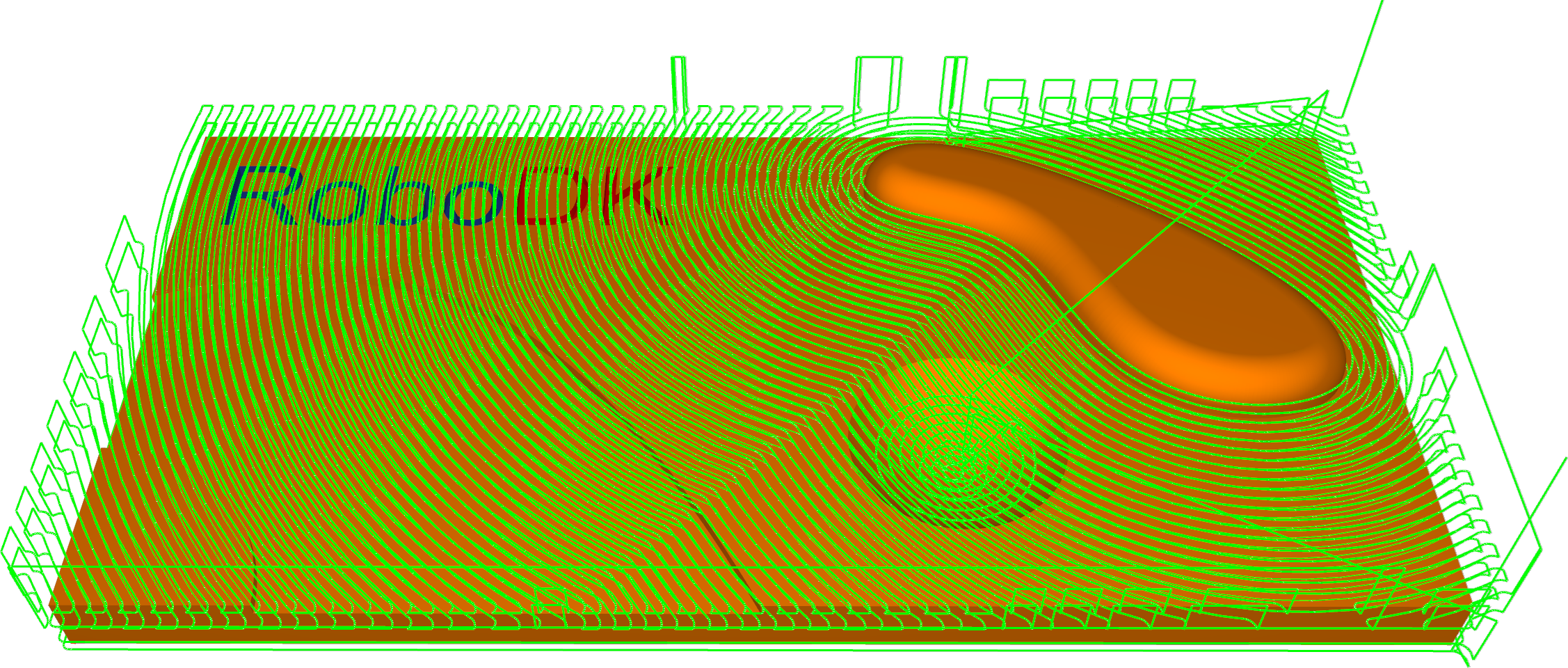
Superfícies – Linha de fluxo
A Linha de fluxo cria uma trajetória da ferramenta que é alinhada (ou mapeada) ao lado curto ou longo ou ao longo das dimensões paramétricas (U ou V) da superfície dada.
A principal vantagem é que a trajetória da ferramenta da linha de fluxo pode ser criada sem selecionar geometrias delimitadoras adicionais, como superfícies de parede ou curvas de borda. O passo máximo pode ser mantido com uma distância constante, mesmo que a topologia da superfície seja muito complexa. Além disso, o tempo de cálculo é muito rápido.
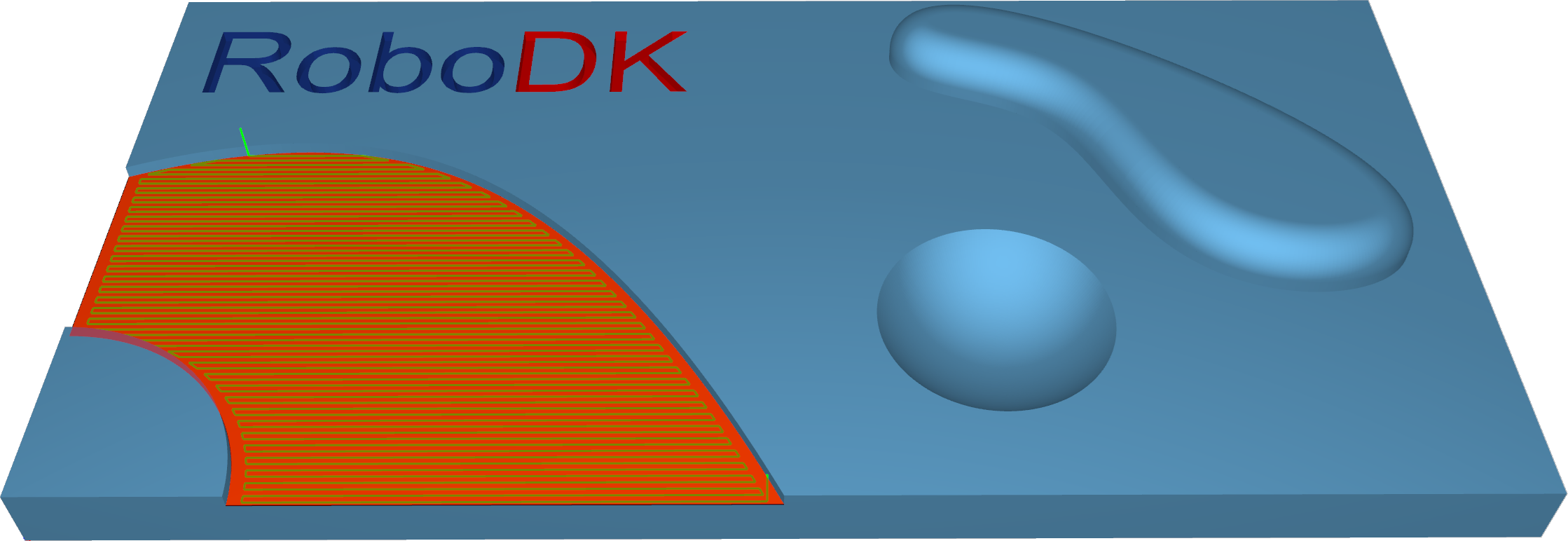
Estação: CAM-Superfícies-Linha de fluxo.
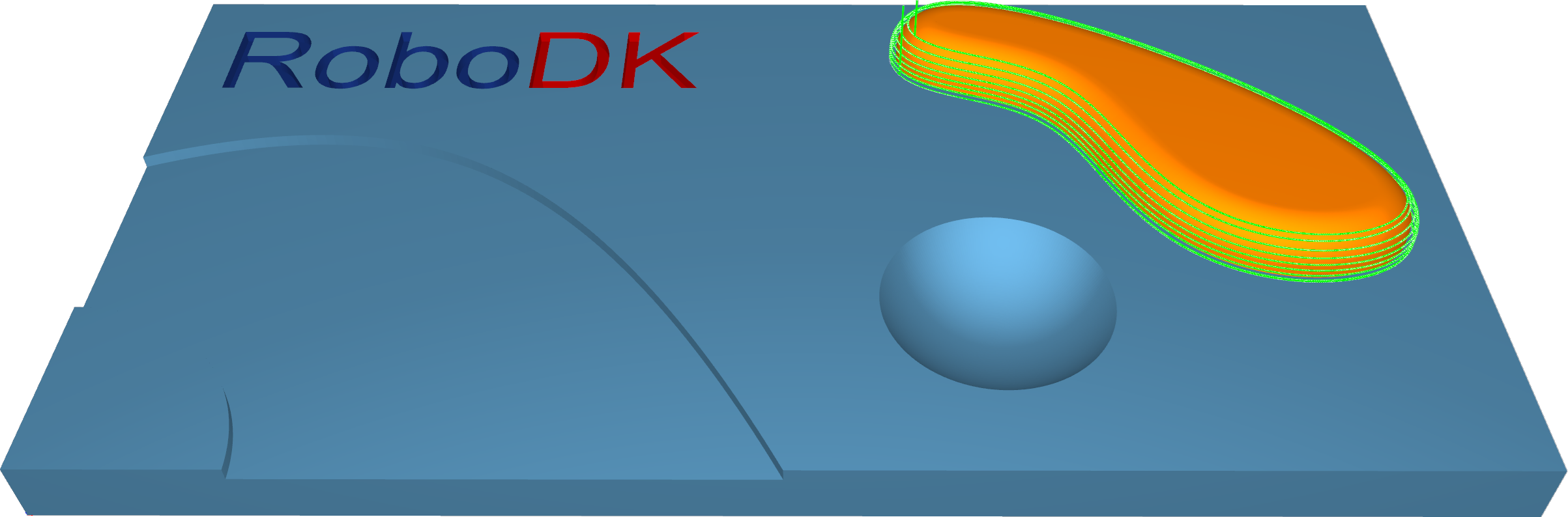
Superfícies – Morph entre duas curvas
Esta opção cria uma trajetória da ferramenta de transformação entre duas curvas principais, inseridas como “Primeira” e “Segunda”. Transformação significa que a trajetória da ferramenta gerada interpola gradualmente entre as duas curvas e se espalha uniformemente sobre a superfície.
Esta opção é adequada para usinagem de áreas íngremes na fabricação de moldes.
Estação: CAM-Superfícies-MorphBetween2Curves.
Superfícies – Morph entre duas superfícies
Esta opção criará uma trajetória da ferramenta morph na superfície de acionamento. A superfície de acionamento é delimitada por duas superfícies de verificação. Morph significa que a trajetória da ferramenta gerada é aproximada entre as superfícies de verificação e espalhada uniformemente sobre a superfície de acionamento. Especialmente a usinagem do impulsor com suas pás de turbina torcidas pode ser usinada usando esta opção.
Bi-Tangência – a principal vantagem é a possibilidade de compensar a ferramenta para a superfície de acionamento e verificar a superfície nos cantos esquerdo e direito da peça de trabalho. Tudo o que você precisa fazer é habilitar o raio da ferramenta nas opções (margem), que é a distância entre o centro da ferramenta e as superfícies.
Estação: CAM-Superfícies-MorphBetween2Surfaces.
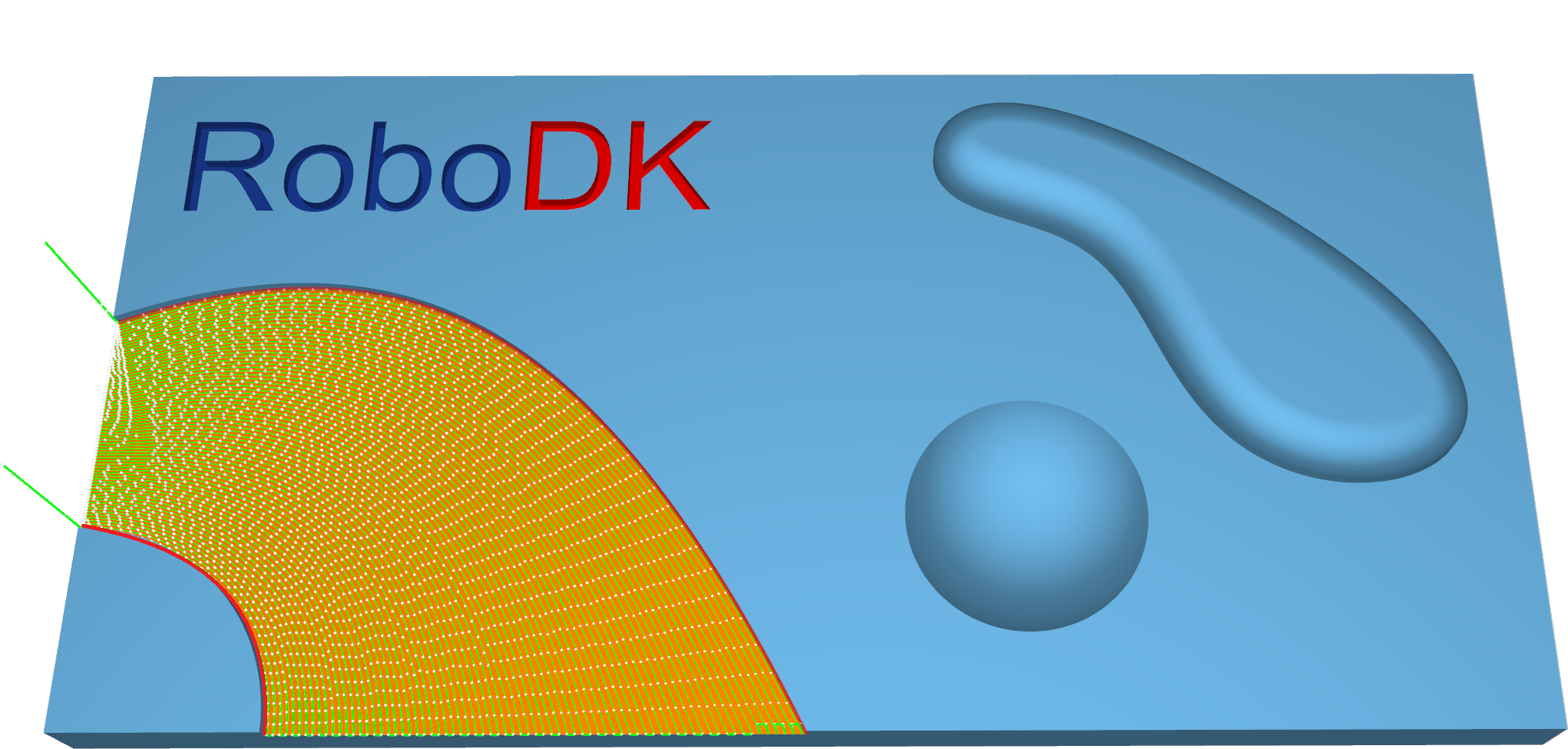
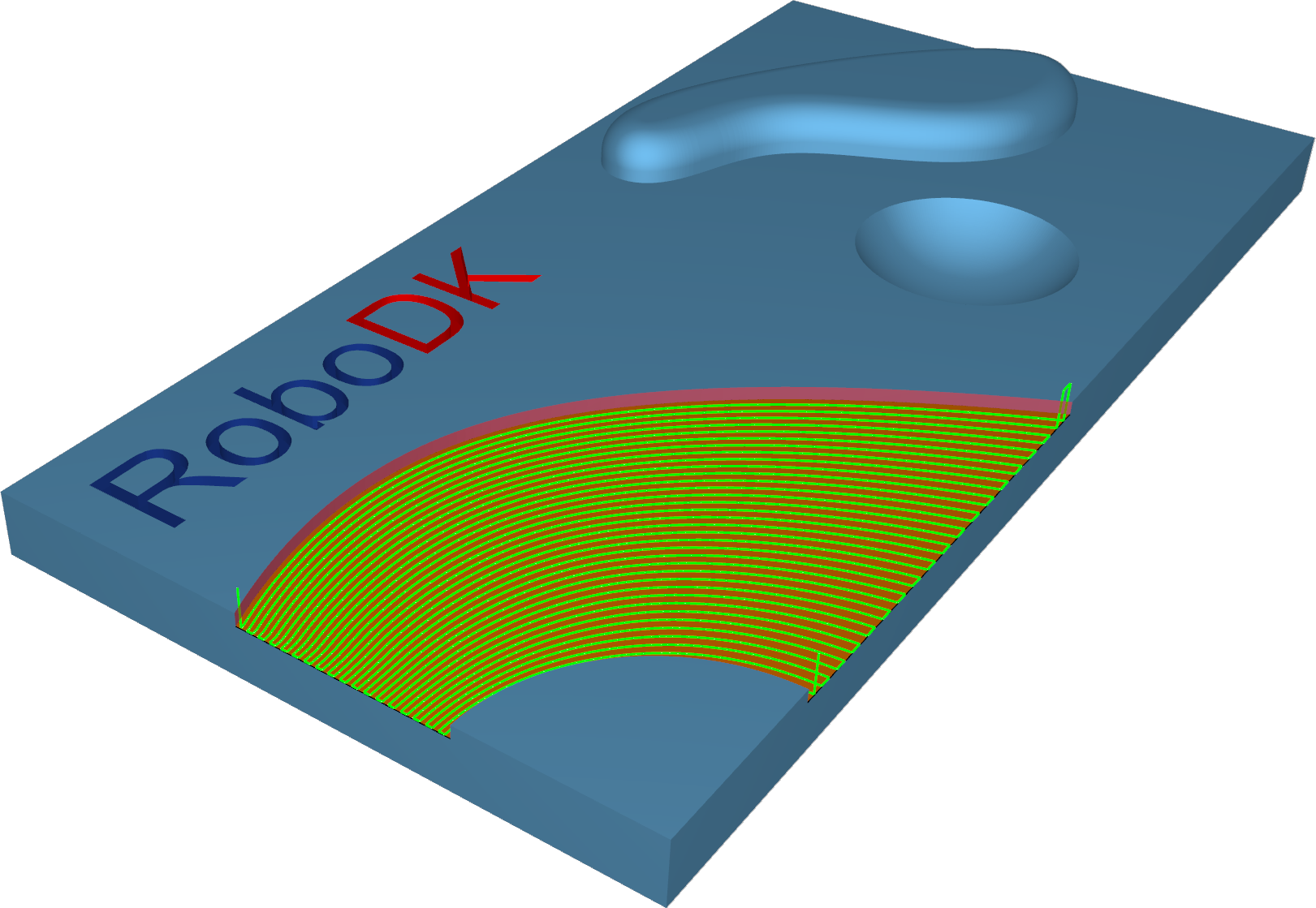
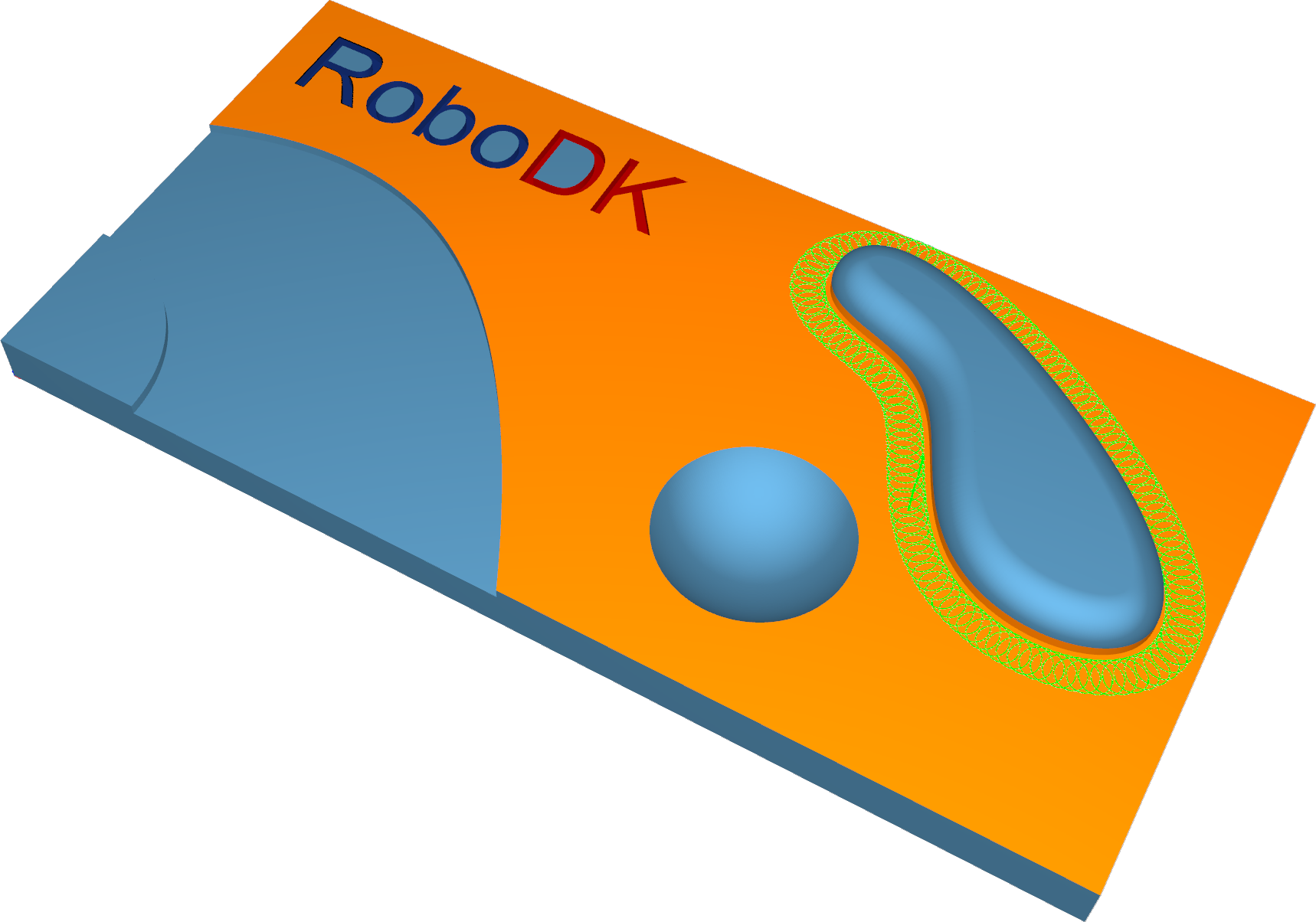
Superfícies – Paralelo a múltiplas curvas
A opção Paralelo à curva criará segmentos de trajetória da ferramenta paralelos à curva principal. Os segmentos de trajetória da ferramenta vizinhos são paralelos entre si. O ponto importante aqui é que os cortes não serão simplesmente copiados um ao lado do outro. Cada novo corte será um deslocamento do corte anterior.
Observações importantes:
1.A curva deve estar localizada exatamente na borda da superfície. Portanto, a melhor curva seria a própria borda. Isso é muito importante para a geração das trajetórias da ferramenta. Se você não tiver uma curva principal adequada alinhada à borda, uma trajetória da ferramenta incorreta poderá ser gerada.
2.Para curvas independentes na mesma superfície, apenas a primeira curva será usada. Para modelos mais complexos, isso significa que é difícil fornecer a curva inicial correta para a usinagem de todo o modelo.
3.Para curvas consecutivas na mesma superfície, todas as curvas devem ser unidas em uma única curva. Esta etapa pode ser realizada a partir de qualquer sistema CAD ou pode ser feita automaticamente pelo sistema.
4.Para curvas independentes na mesma superfície, apenas a primeira curva será utilizada. Para modelos mais complexos, isso significa que é difícil fornecer a curva inicial correta para a usinagem de todo o modelo.
5.Várias curvas selecionadas em superfícies independentes gerarão cortes diferentes em cada superfície.
6.A distância entre dois segmentos vizinhos das trajetórias da ferramenta é o passo máximo.
7.É possível definir uma margem para obter a posição exata onde a ferramenta está localizada na borda com uma determinada distância.
8.Com o padrão Paralelo a múltiplas curvas, é possível utilizar múltiplas curvas para múltiplas superfícies. Cada curva será agora utilizada apenas para a superfície mais próxima.
Estação: CAM-Superfícies-Paralelo2MúltiplasCurvas.
Superfícies – Paralelo à superfície
Paralelo à superfície criará cortes na superfície da unidade que são paralelos a uma superfície principal.
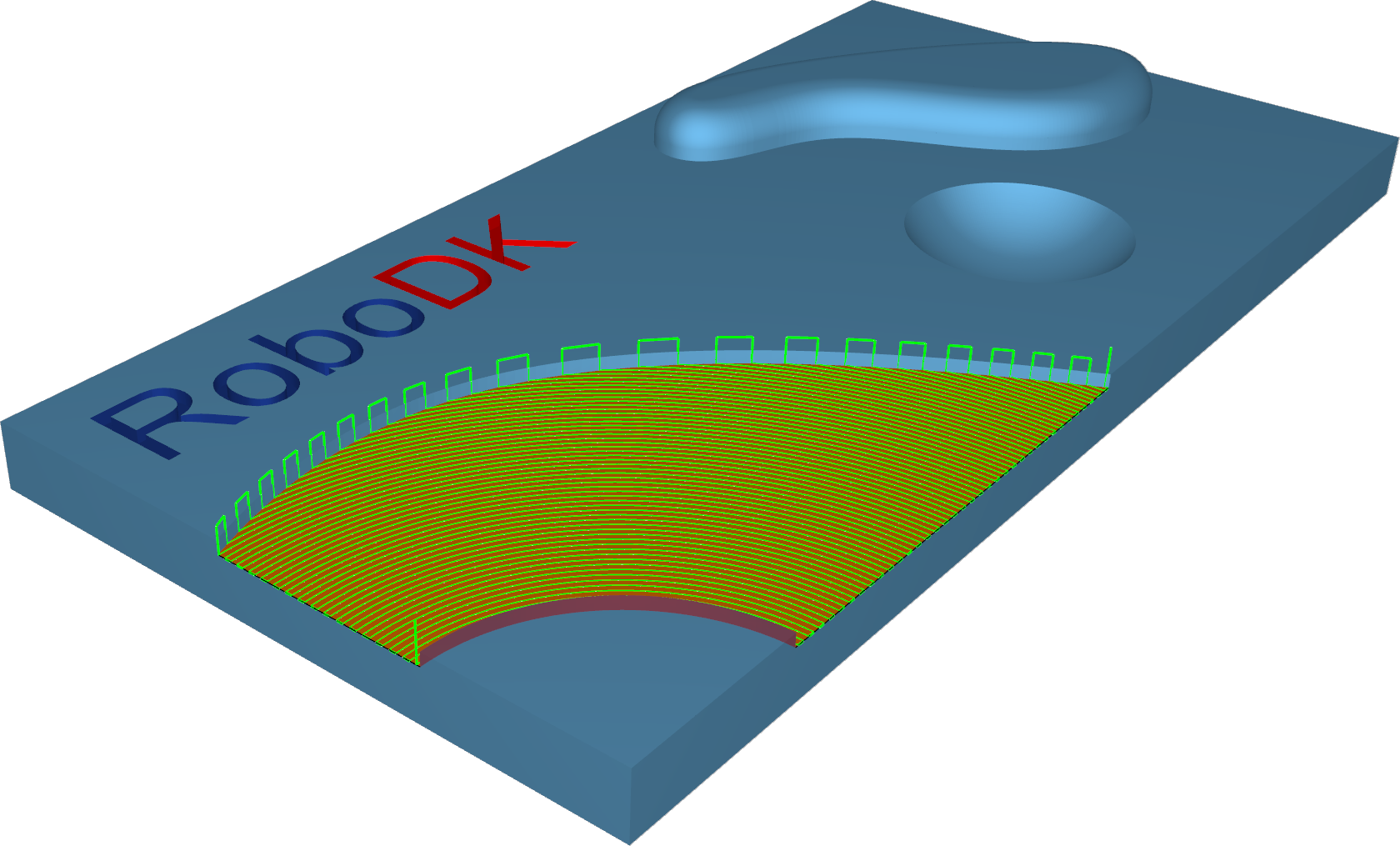
Estação: CAM-Superfícies-Paralelo2Superfície.
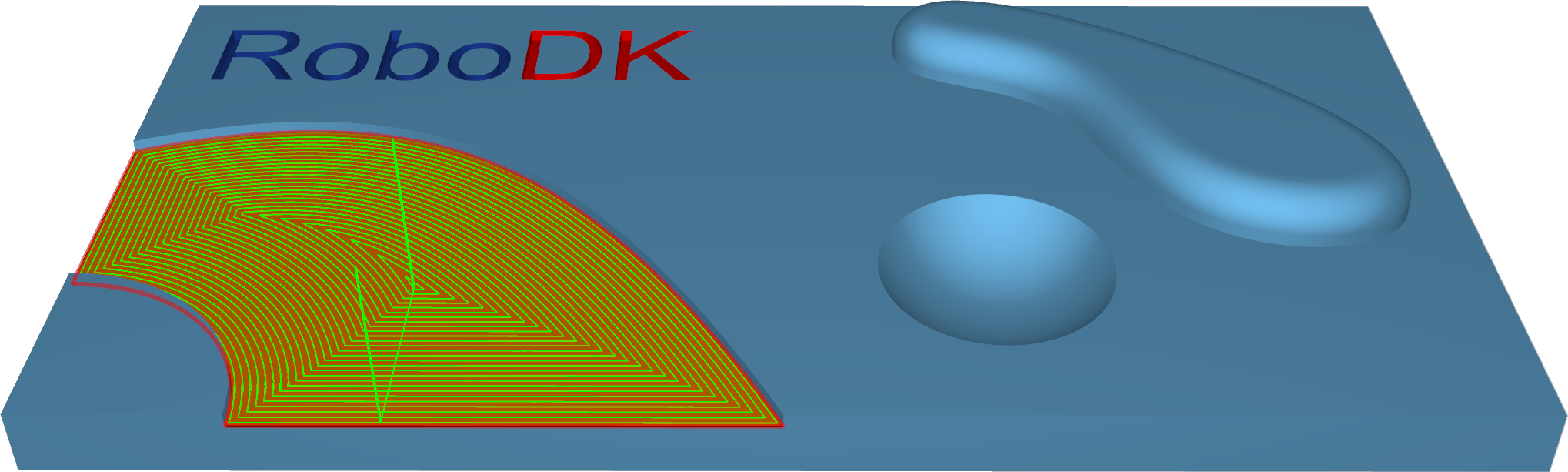
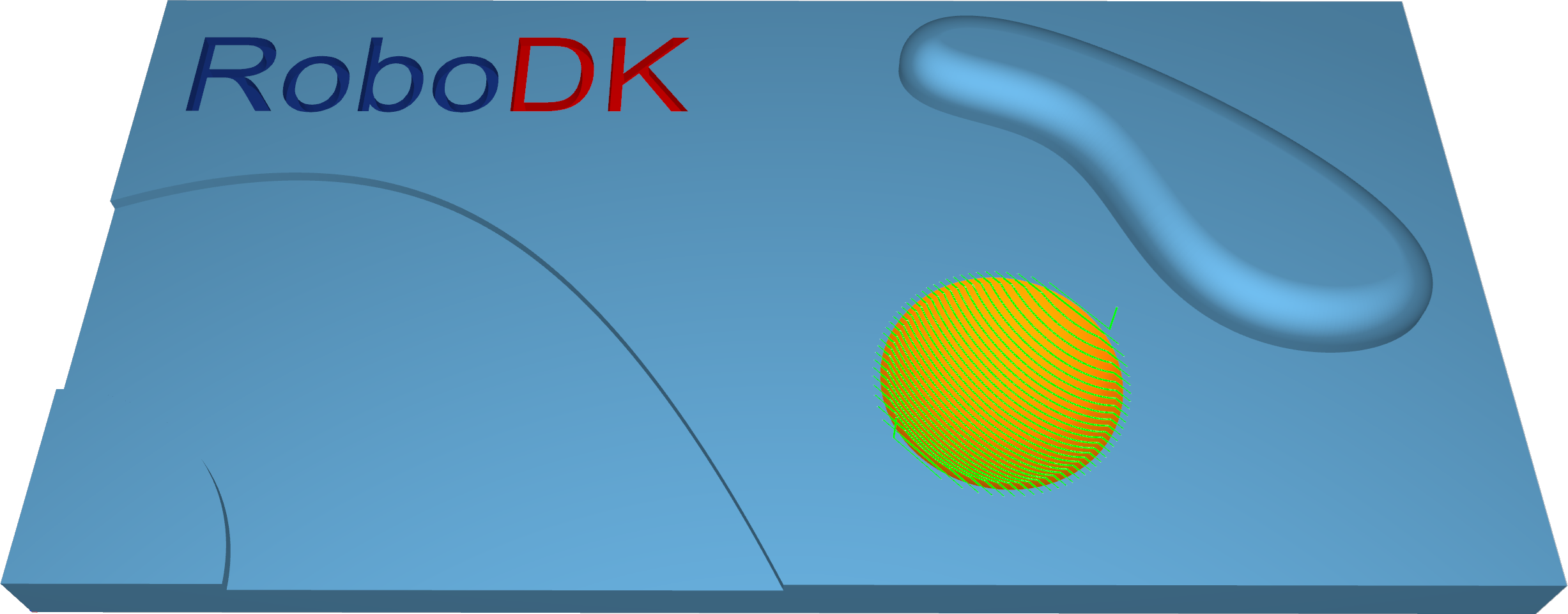
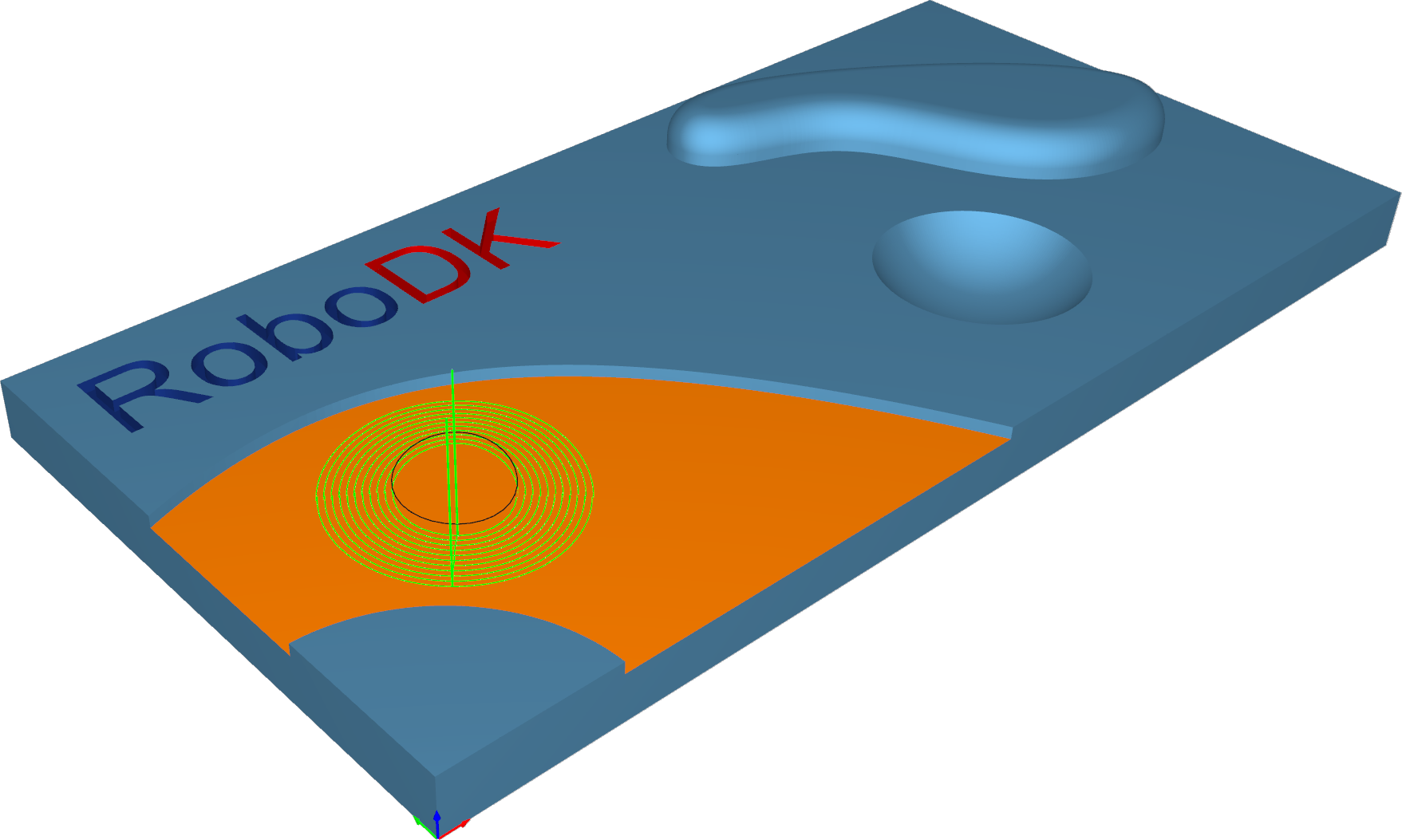
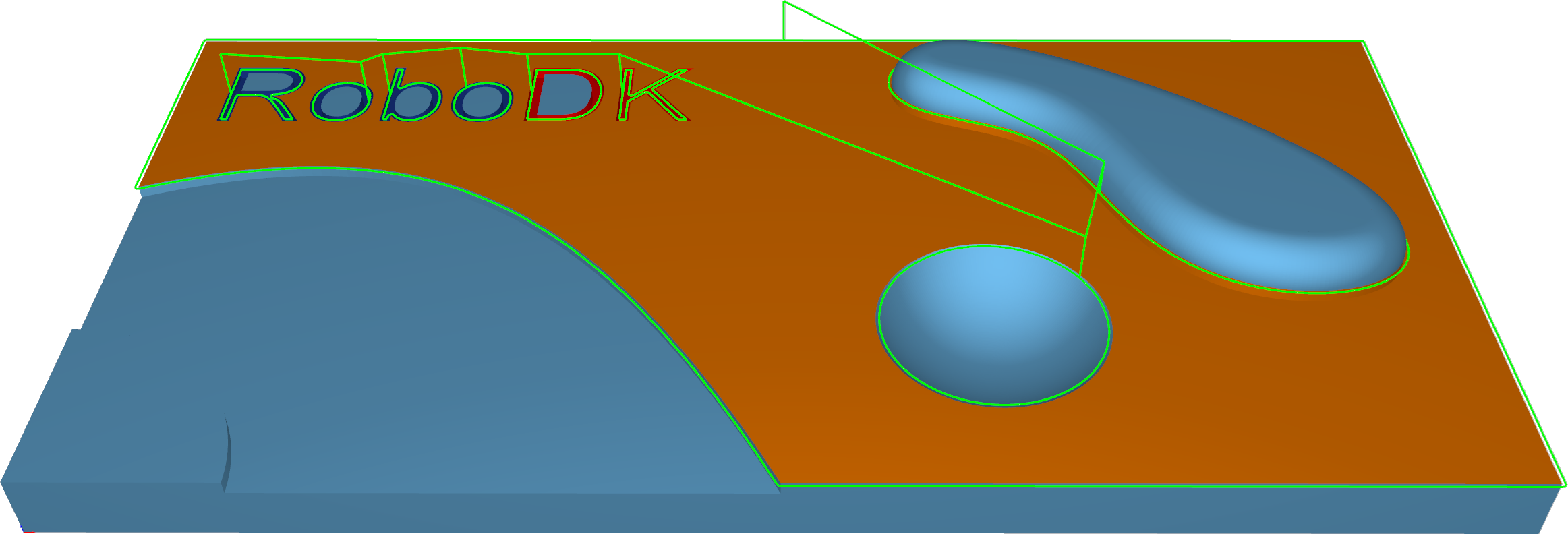
Superfícies – Curva projetada
Com este padrão, é possível criar uma curva definida pelo usuário ou um padrão genérico. Existem duas projeções de padrão 2D, radial e espiral, e duas projeções de curva 3D: deslocamento e definida pelo usuário.
Estação: CAM-Superfícies-ProjetarCurva.
Trimesh–Desbaste
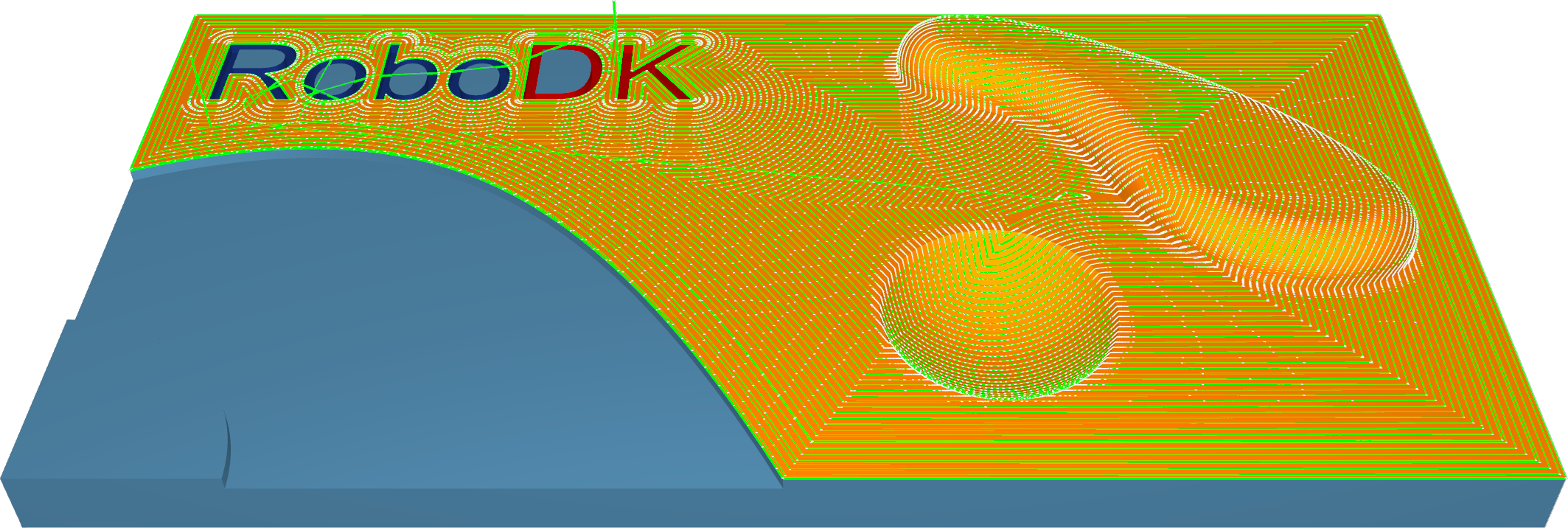
O desbaste é a primeira etapa da usinagem. Essa estratégia é usada para remover grandes volumes de material em excesso muito rapidamente e deixar uma pequena quantidade de material para estratégias de semiacabamento e acabamento. É possível usar essa estratégia para criar um componente bruto a partir de um bloco retangular ou em forma de núcleo.
As trajetórias da ferramenta realizam o corte no material em níveis Z sucessivos, trabalhando de cima para baixo. O parâmetro “Passo de profundidade” define a distância entre dois níveis Z. O caminho da ferramenta é criado a partir de fatias do modelo e deslocado para fora. A distância entre dois deslocamentos é definida pelo passo lateral. Os segmentos da trajetória da ferramenta são recortados para os limites do bloco. O resultado é um componente em bruto com um efeito de escada em todo o componente, que difere do componente de acabamento por uma espessura cujo valor é definido no campo de deslocamento.
Estação: CAM-Trimesh-desbaste.
Trimesh – Cortes paralelos
Esta estratégia permite a usinagem de componentes 3D com trajetórias da ferramenta paralelas entre si em relação aos eixos X e Y. Qualquer ângulo desejado no plano XY pode ser definido usando o parâmetro “Ângulo de usinagem em X,Y”.
Esta estratégia é geralmente utilizada para semi-acabamento ou acabamento de um componente. É mais adequada para áreas de usinagem rasas.
Estação: CAM-Trimesh-ParallelCuts.
Trimesh–Curva de projeto
Na estratégia Curva projetada, um padrão de curva 2D ou 3D é projetado na malha triangular para criar uma trajetória da ferramenta.
Estação: CAM-Trimesh-ProjectCurve.
Trimesh – Z constante
Esta estratégia permite a usinagem de componentes 3D com trajetórias da ferramenta paralelas a um plano que depende da direção de usinagem. Imagine um componente sendo cortado de cima para baixo.
Essa estratégia é geralmente usada para semiacabar ou realizar o acabamento de um componente. É mais adequada para a usinagem de áreas íngremes - paredes verticais ou quase verticais de um componente 3D.
1.Z constante + cúspide constante: este padrão permite a usinagem de peças que consistem em regiões íngremes e rasas em uma única iteração. As regiões íngremes são usinadas com a ajuda de cortes Z constantes. Uma cúspide constante é aplicada para o processamento de áreas rasas.
2.Z constante + cortes paralelos: este padrão permite a usinagem de peças compostas por regiões íngremes e rasas em uma única iteração. As regiões íngremes são usinadas com a ajuda de fatias Z constantes. Os cortes paralelos são aplicados para o processamento de áreas rasas.
Estação: CAM-Trimesh-ConstantZ.
Trimesh–Cúspide constante
Esta estratégia criará um padrão de corte equidistante nas superfícies de usinagem. O objetivo é ter uma distância constante entre cada contorno para que as cúspides criadas tenham a mesma altura.
Essa estratégia é geralmente usada para semifinish ou acabamento de um componente. É mais adequada para a usinagem de áreas íngremes e rasas.
Estação: CAM-Trimesh-ConstantCusp.
Trimesh–Flatlands
Esta estratégia foi projetada para realizar a usinagem de áreas verdadeiramente planas de componentes 3D por meio de trajetórias da ferramenta que são segmentos deslocados do limite da área plana. Geralmente é utilizada para realizar o acabamento de um componente. É mais adequada para realizar a usinagem de grandes áreas planas em vários níveis Z.
Áreas planas, como superfícies de separação, podem ser usinadas por uma fresa de topo ou fresa de ponta arredondada usando a estratégia de usinagem de áreas planas.
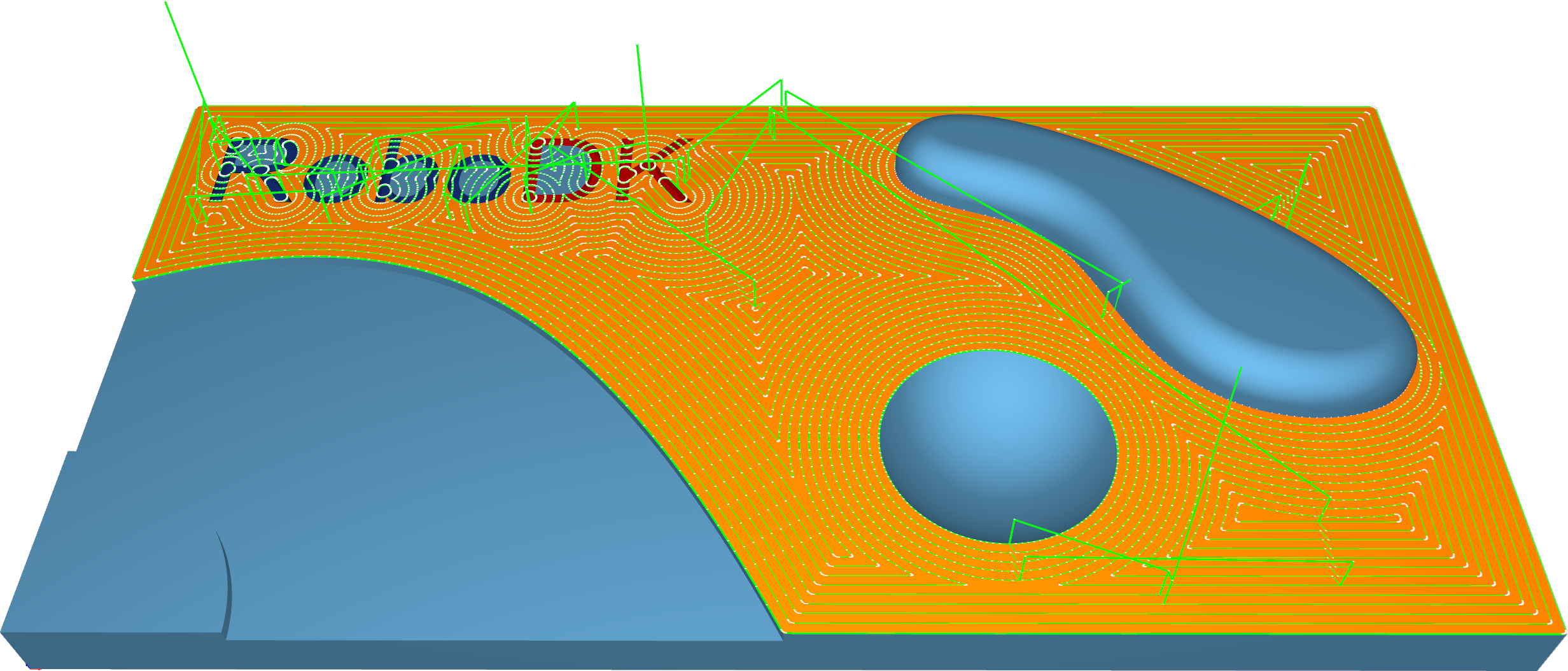
Estação: CAM-Trimesh-Flatlands.
Trimesh–Pencil
Esta estratégia tem como objetivo fornecer um processamento rápido de cantos e filetes. Ela pode ser realizada por meio de cortes com um ou vários lápis.
Estação: CAM-Trimesh-Pencil.
Trimesh–Trochoidal
A estratégia proporciona usinagem sequencial do contorno da peça por meio de movimentos trocoidais.
Pode ser aplicada para realizar o corte de peças a partir do material bruto.
Estação: CAM-Trimesh-Trochoidal.
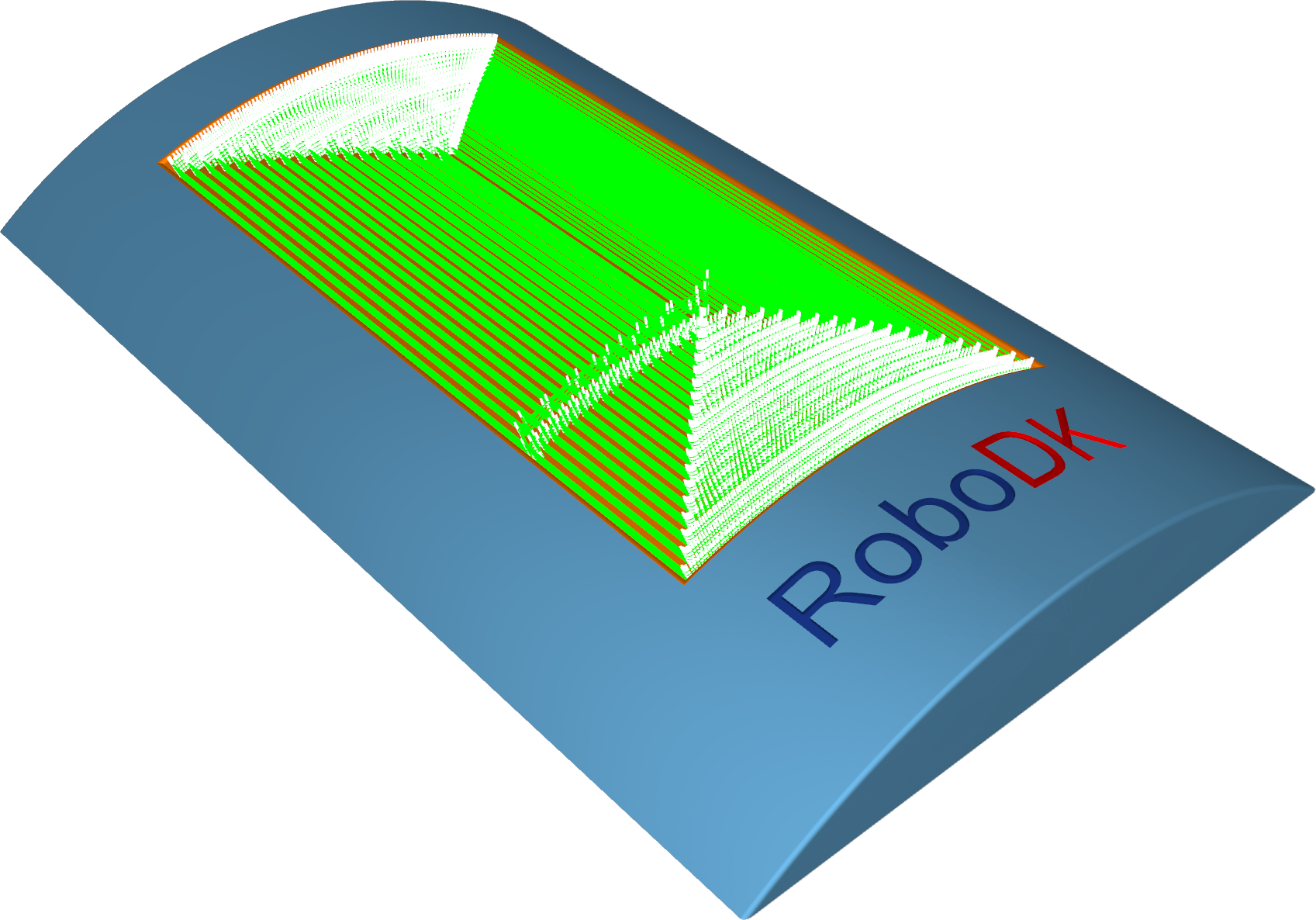
Wireframe–Perfilagem de 5 eixos
Este cálculo fornece a geração das trajetórias da ferramenta com base nas curvas de acionamento da estrutura de wireframe. Funciona sem quaisquer superfícies de usinagem.
A orientação da ferramenta é definida por linhas de inclinação e é perpendicular às linhas de orientação. São necessárias configurações de inclinação, que podem ser controladas pelas opções de inclinação. As orientações do eixo da ferramenta são interpoladas entre as linhas.
Estação: CAM-Wireframe-5ax.
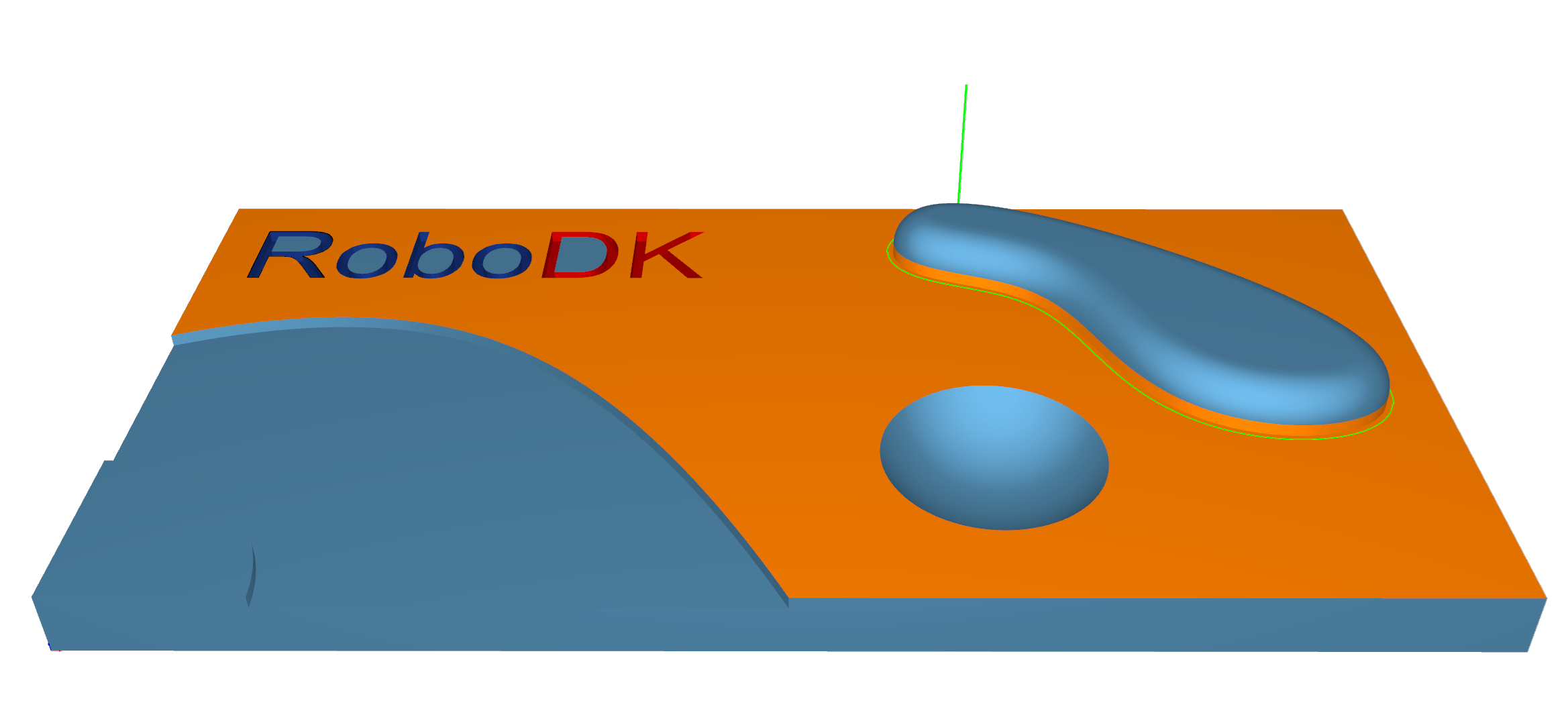
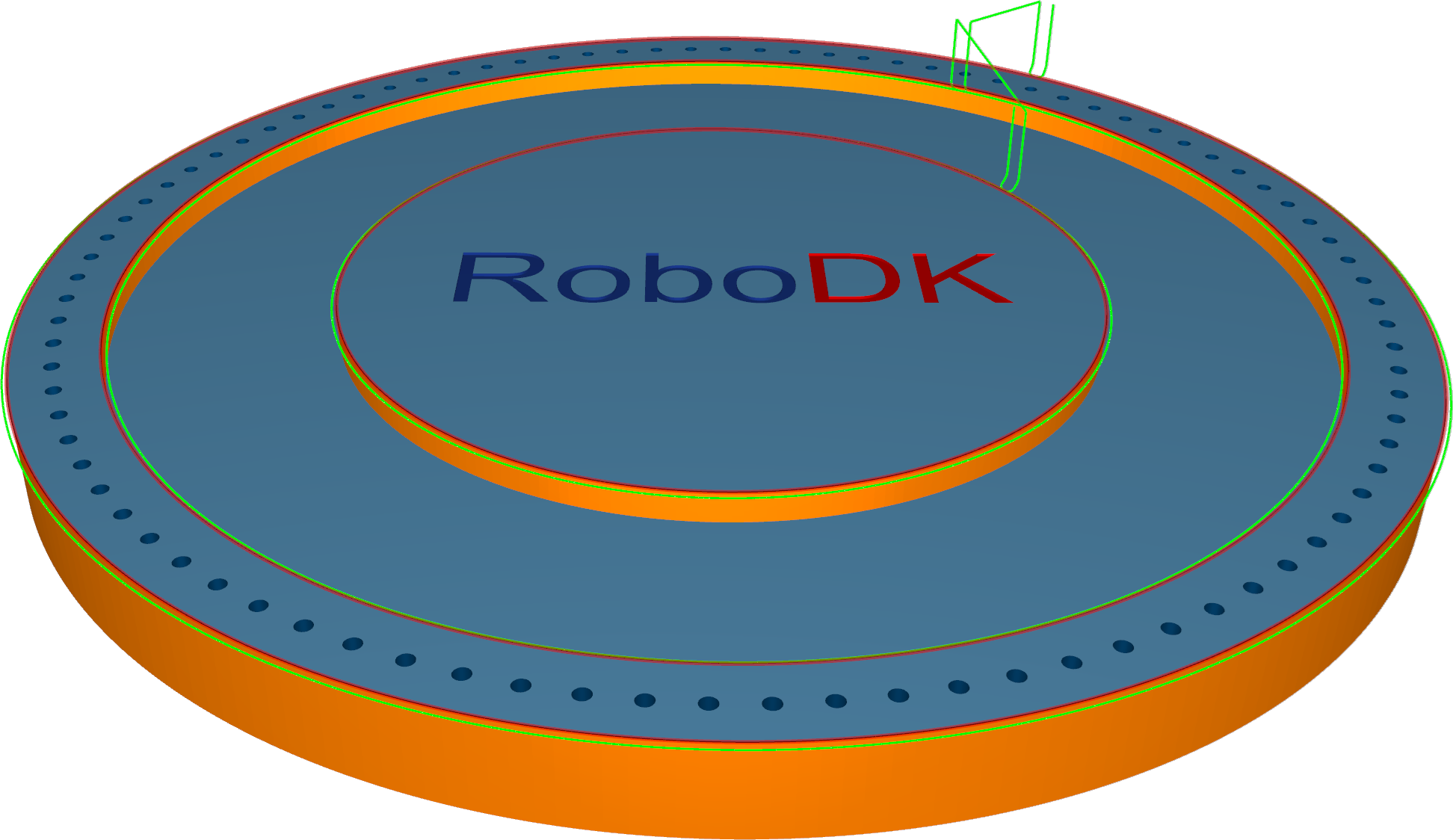
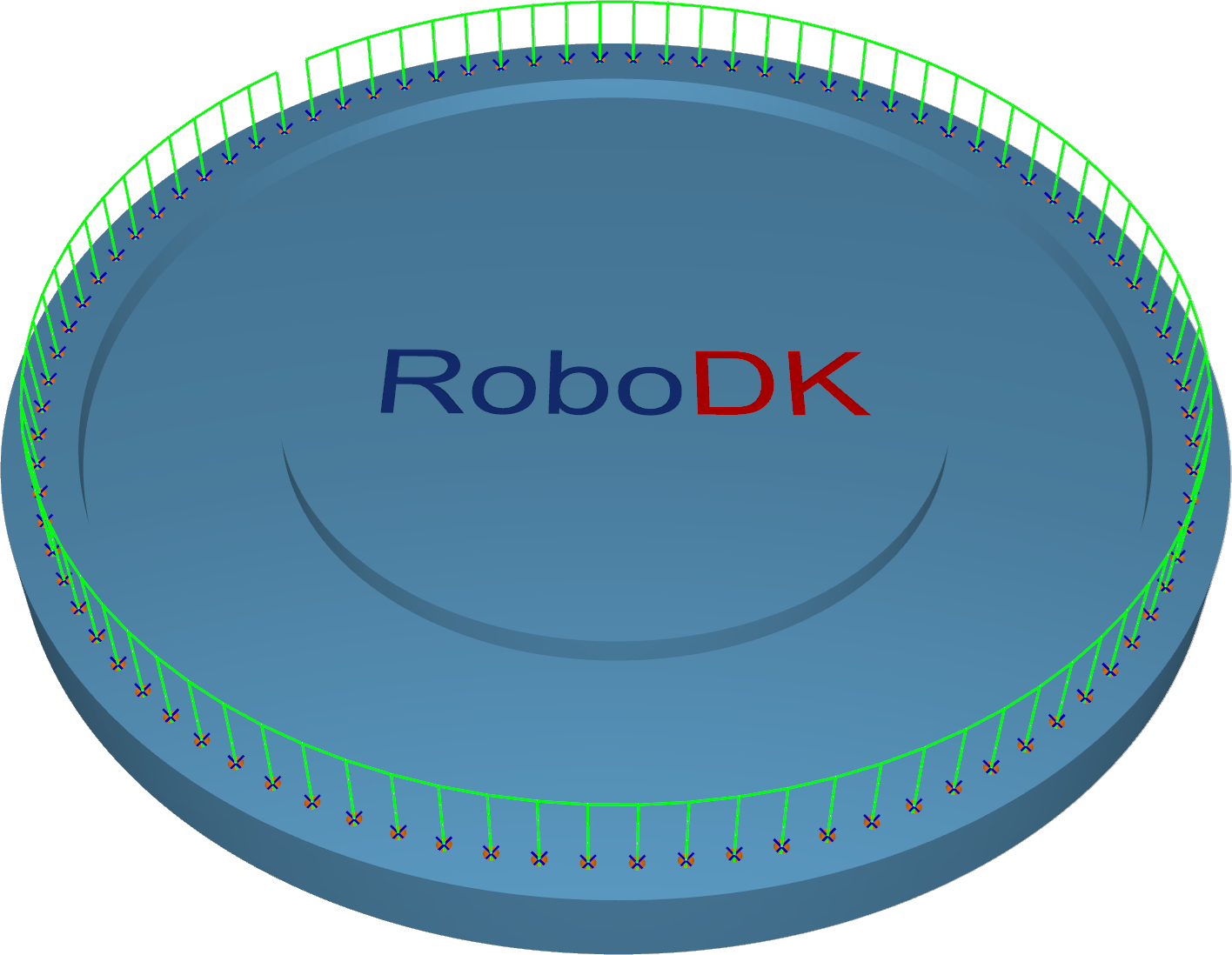
Contorno
O contorno é um algoritmo altamente automatizado para criar a trajetória da ferramenta de recorte de bordas.
A estratégia de cálculo do contorno foi projetada para o recorte de bordas de materiais finos. A posição da ferramenta em relação à geometria pode ser definida por várias opções, desde uma saída de apenas 3 eixos até uma saída mais complexa de 5 eixos com diferentes opções de orientação do eixo da ferramenta. Uma característica fundamental deste algoritmo é o deslocamento axial, onde a ferramenta pode ser engatada com um determinado valor no material. O contorno pode ser automatizado ou definido pelo usuário.
Estação: CAM-Contorno.
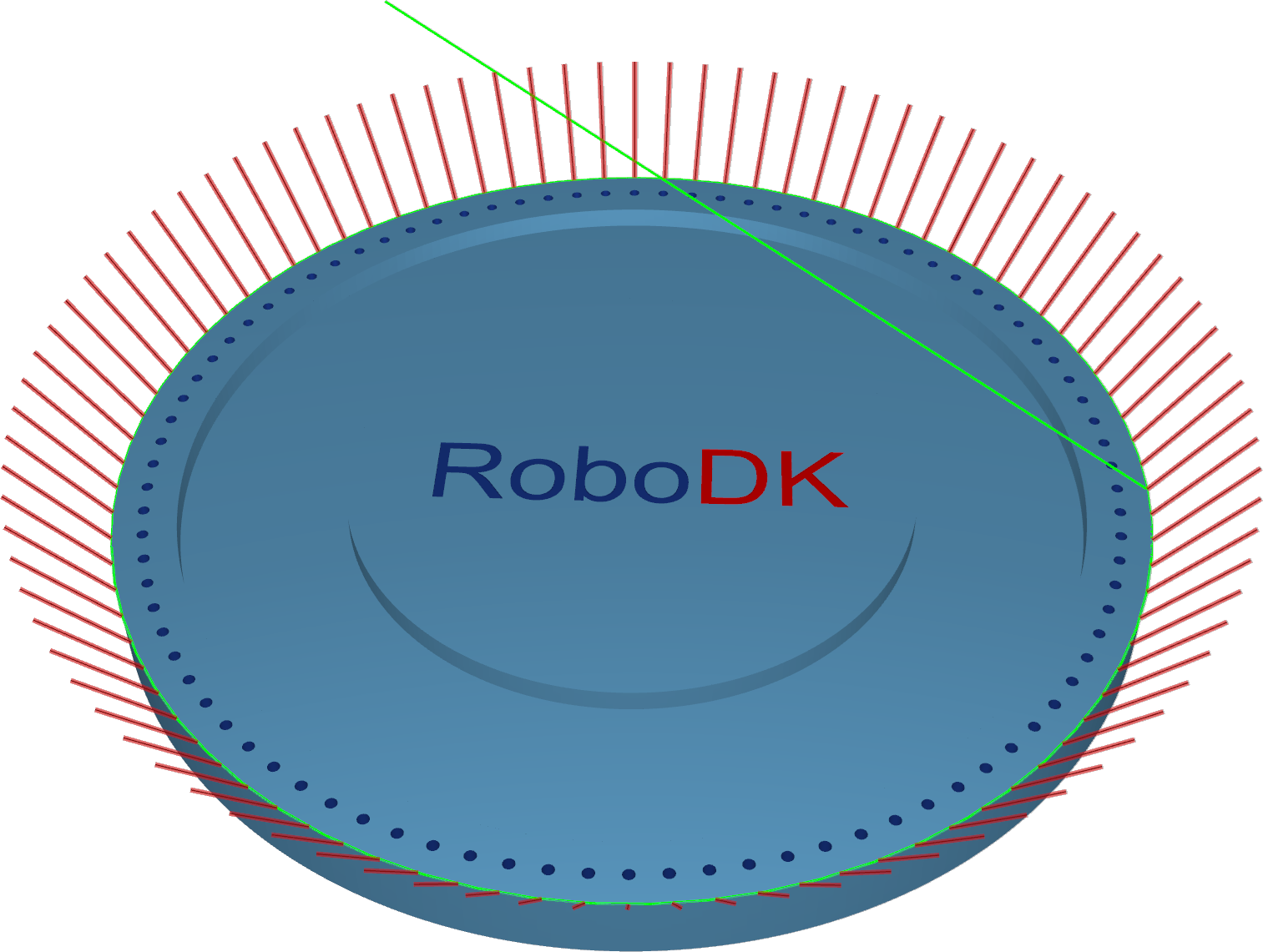
Rebarbação
O algoritmo de rebarbação cria uma trajetória da ferramenta de rebarbação nas bordas externas da geometria de uma peça. Por padrão, a orientação das ferramentas esféricas em relação à borda é o bi-vetor entre as duas superfícies dessa borda. Configurações especiais de inclinação e outras ferramentas ajustam a orientação conforme necessário.
Para detectar todas as bordas, a entrada da geometria (uma malha) deve ser de boa qualidade.
Estação: CAM-Rebarbação.
Furação
O cálculo baseado em pontos de furação é um ciclo de furação muito básico. Ele funciona sem nenhuma superfície de usinagem. As posições e orientações da broca serão definidas com pontos ou linhas.
Na superfície - com pontos/linhas na superfície, o usuário deve selecionar pontos/linhas que estejam posicionados diretamente na superfície. A orientação do eixo da ferramenta é determinada pela normal da superfície.
Pontos - Para este ciclo, o usuário deve selecionar pontos da geometria. O ciclo de furação começa nos pontos selecionados. A orientação deve ser configurada na guia Controle do eixo da ferramenta.
Linhas - Para este ciclo, o usuário deve selecionar linhas da geometria. As linhas definem a posição e a orientação da ferramenta, bem como a profundidade da furação.
Estação: CAM-Furação-Pontos.
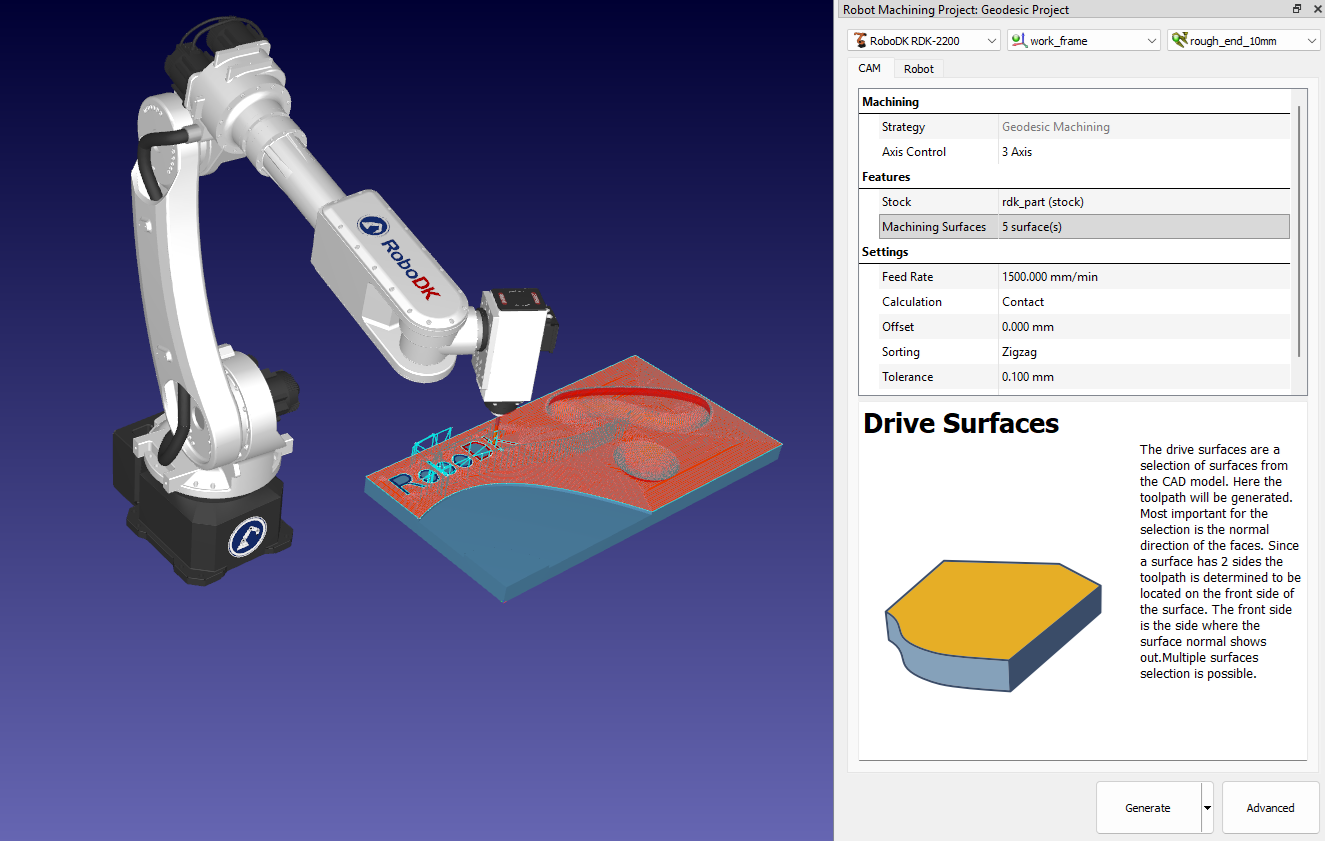
Geodésico
Geodésico é uma generalização do conceito de uma “linha reta” mapeada em “espaços curvos”. Essas distâncias geodésicas são usadas para criar padrões que consideram as distâncias na topologia da superfície.
A usinagem geodésica oferece dois modos:
1.O modo de ponto de contato suporta todas as ferramentas. A saída é semelhante ao padrão baseado na superfície e não garante um padrão sem colisões com a geometria circundante (por exemplo, em cantos internos).
2.O modo centro da ferramenta suporta apenas ferramentas esféricas. O cálculo é gerado no espaço de deslocamento para evitar colisões com a geometria circundante.
Estação: CAM-Geodésico.
Multieixos
O algoritmo multieixo cria uma trajetória da ferramenta multieixo que pode ser utilizada para a usinagem de geometrias em forma de cavidade. O cálculo utiliza malhas STL e geometrias IGES como entrada. O usuário deve especificar as superfícies do piso, da parede e do teto, e o sistema cria automaticamente a trajetória da ferramenta.
O algoritmo de desbaste multieixo cria uma trajetória da ferramenta multieixo que pode ser usada para desbastar geometrias em forma de cavidade. Os parâmetros são idênticos aos do ciclo de desbaste baseado em malha triangular, que inclui o recurso de desbaste adaptativo.
O algoritmo Multiaxis Floor Finish cria uma trajetória da ferramenta multieixo para o acabamento de geometrias em forma de bolso. Os usuários devem especificar as superfícies da peça e do piso.
O algoritmo Multiaxis Wall Finish cria uma trajetória da ferramenta multieixo que pode ser usada para o acabamento de geometrias em forma de bolso. O usuário deve especificar o piso e a parede.
O algoritmo Multiaxis Rest Finish cria uma trajetória da ferramenta multieixo para o acabamento residual de geometrias em forma de bolso. O usuário deve fornecer as operações de acabamento do piso e da parede como entrada. O cálculo utiliza curvas de contenção em torno das áreas não usinadas, fornecidas pelo usuário ou derivadas automaticamente de operações de usinagem multieixos anteriores.
O usuário pode escolher quais áreas realizar a usinagem e quais curvas usar como curvas-guia, selecionando uma das seguintes opções:
1.Eixo medial: o eixo medial é usado como curva de acionamento. A parte principal do eixo medial é calculada a partir das curvas de contenção.
2.Limite do piso: O limite da superfície do piso é usado como curva guia.
3.Não realizar usinagem: Não realizar usinagem nesta área.
Estação: CAM-Multieixos-Desbaste.
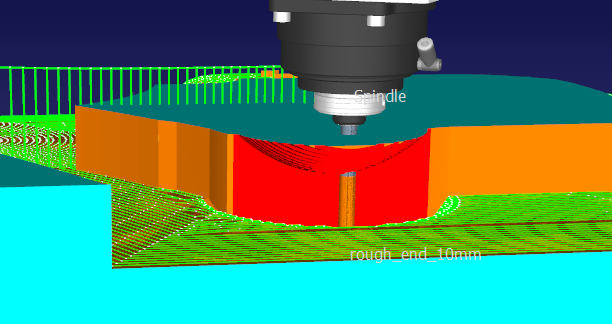
Simulação de remoção de material
A Simulação de remoção de material é uma visualização dinâmica passo a passo do processo de remoção de material. Ela fornece uma simulação detalhada de como uma ferramenta realiza o corte de uma peça ou peça bruta, permitindo que você observe cada etapa do processo de usinagem.
Você deve seguir estas etapas para simular corretamente a remoção de material com o RoboDK CAM:
1.A fresa deve ser definida.
2.Conecte o robô ou CNC se houver mais de um braço robótico na estação.
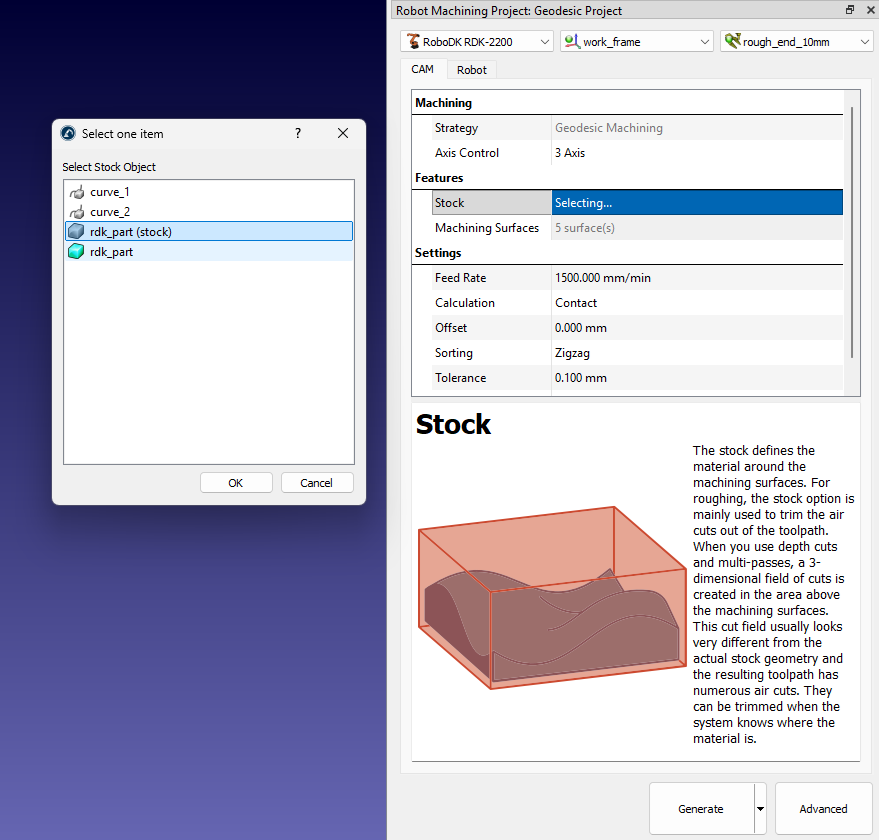
3.Especifique o objeto de estoque.
4.Habilite a simulação de corte. Caso contrário, a simulação será executada sem remoção de material.
Conecte o robô
Utilize a seta para baixo no botão Vincular robô para abrir um menu de robôs disponíveis e vincule a simulação a um deles. Se o botão estiver no estado selecionado (o robô está vinculado), pressioná-lo fará com que o robô se desconecte da simulação.
A ligação entre o robô e a simulação também pode ser feita usando o menu de contexto na árvore da estação.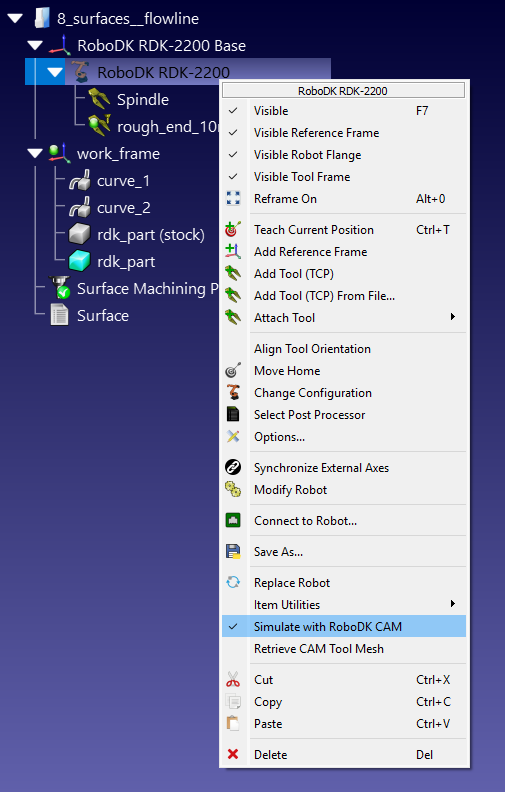
Depois que o robô estiver vinculado à simulação, quaisquer movimentos do robô na janela do RoboDK serão repetidos pelo simulador como movimentos da ferramenta. Independentemente da origem desse movimento: um programa RoboDK, um script Python ou movimento manual com o mouse.
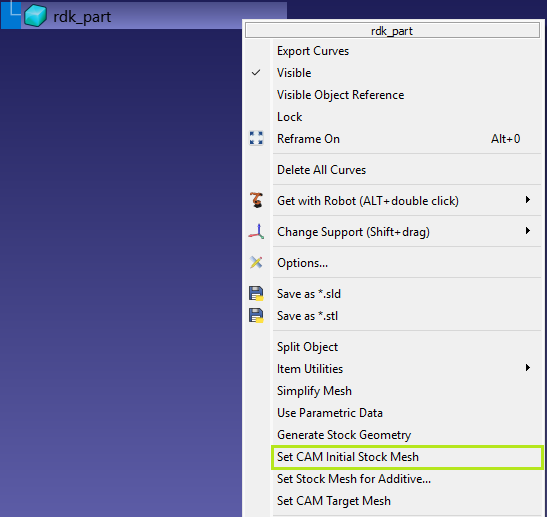
Definição do objeto estoque
Clique com o botão direito do mouse no objeto de estoque na árvore da estação RoboDK e selecione Definir malha inicial de estoque CAM.
Geração do objeto estoque
Clique com o botão direito do mouse no objeto estoque na árvore da estação RoboDK e selecione Gerar geometria do estoque.
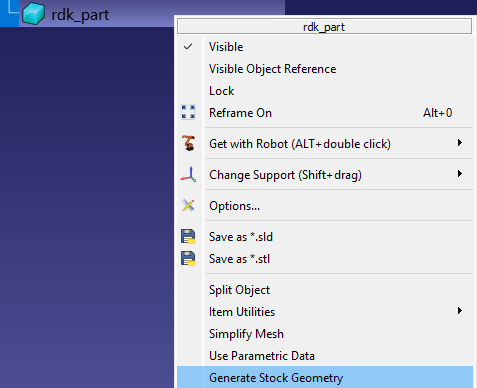
Este comando iniciará o utilitário de criação de estoque, que utiliza a forma original do modelo para o processo de geração.
Existem três métodos para gerar estoques:
1.Caixa delimitadora – guia Caixa
2.Cilindro delimitador – guia Cilindro
3.Escalonamento – guia Do modelo de origem
Na guia Caixa, é possível especificar as dimensões exatas da caixa delimitadora ou gerá-la extraindo (usando o botão Dimensões originais) e ampliando dimensões específicas.
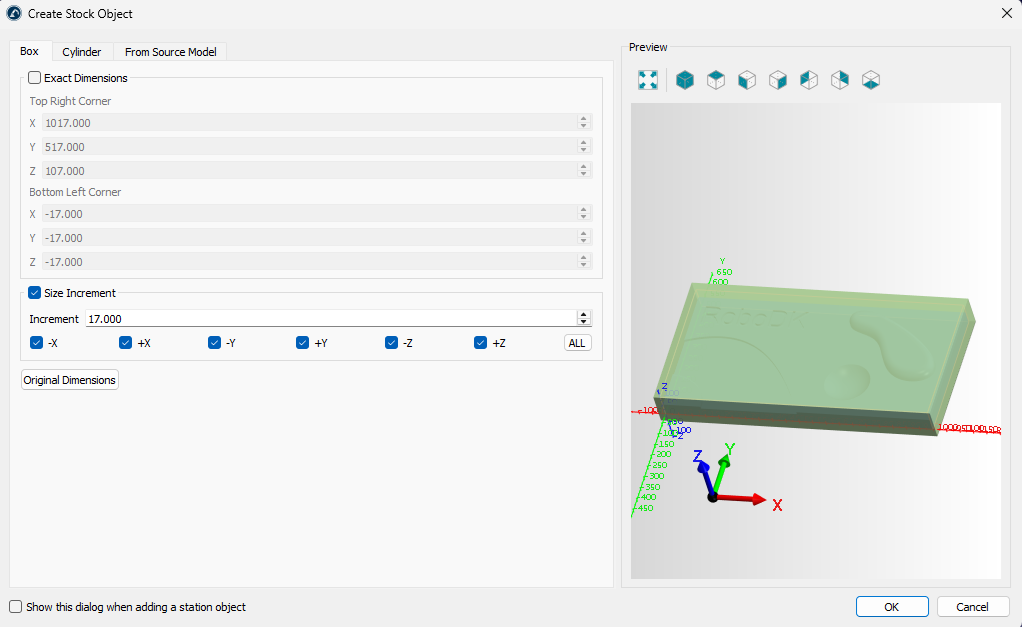
A guia Cilindro permite criar um estoque na forma de um cilindro contendo o modelo original.
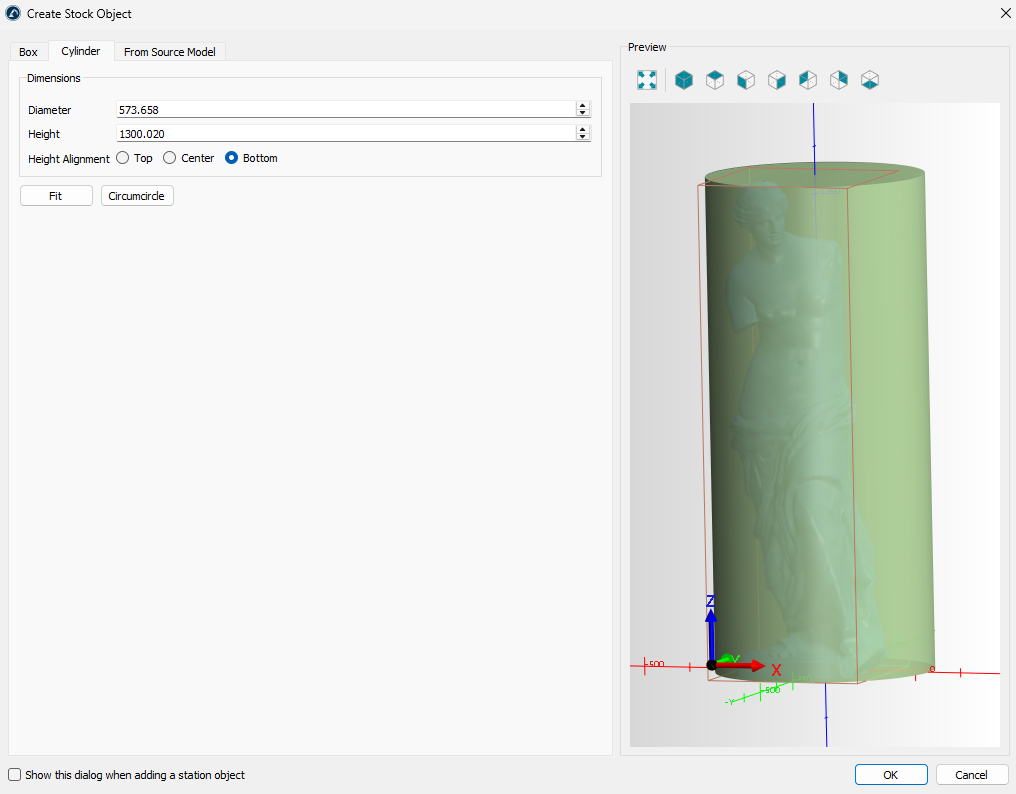
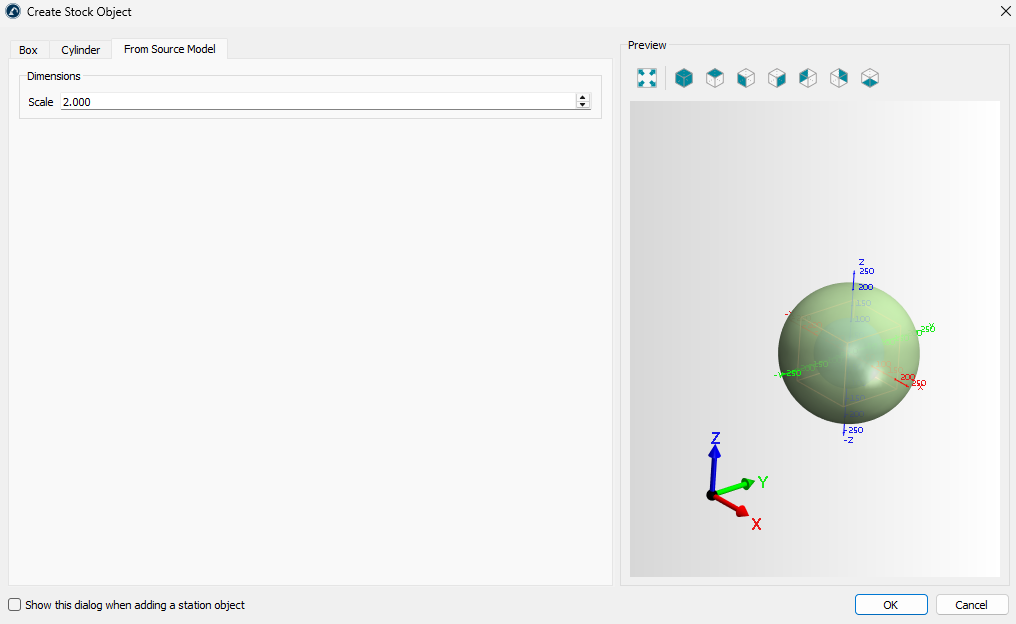
A guia Do modelo de origem permite criar um estoque na forma de um modelo original dimensionado.
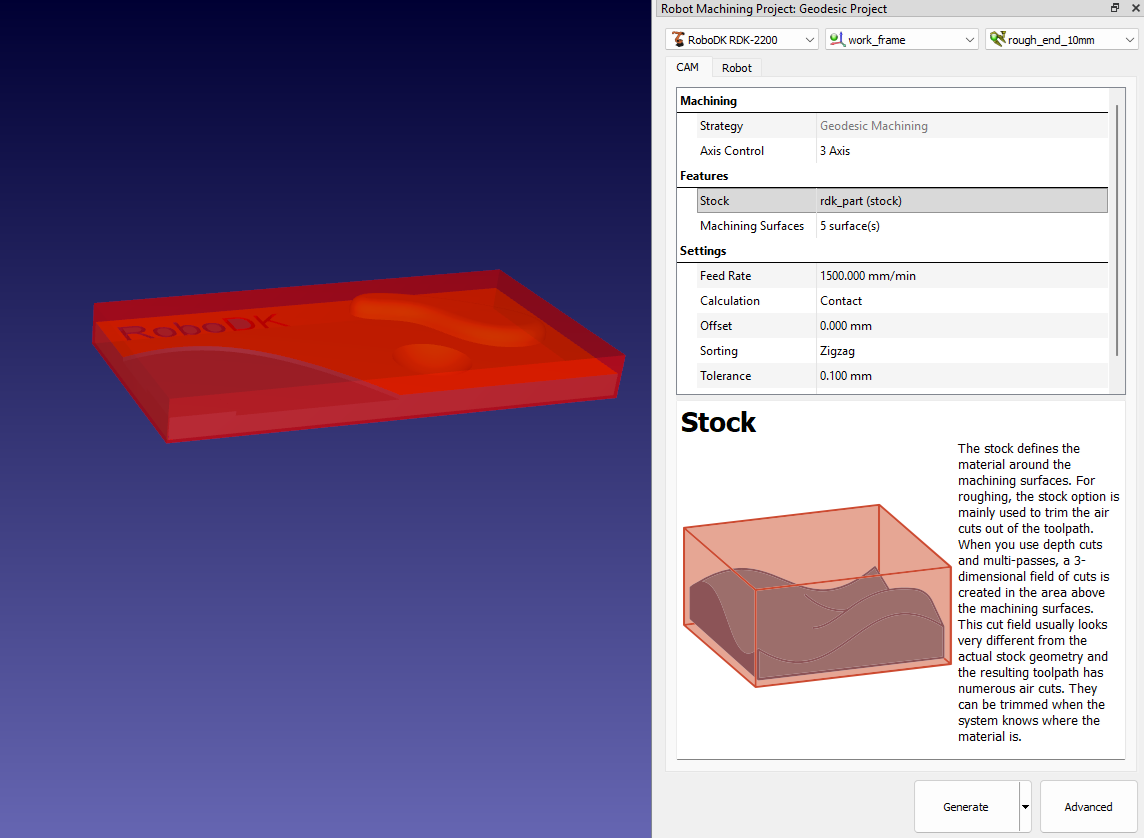
Visualização do estoque
Quando a definição do estoque estiver concluída, o modelo de estoque de simulação será exibido acima dos outros modelos na cena do RoboDK. É possível controlar a visualização da simulação do estoque usando o submenu Visualização do estoque na barra de ferramentas:
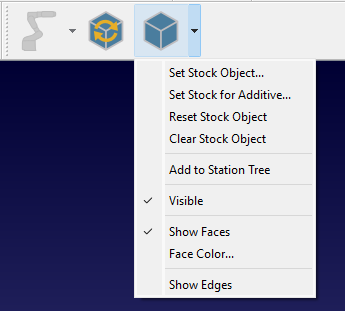
Definir objeto de estoque – defina/redefina um objeto de estoque.
Definir estoque para objeto aditivo – defina/redefina um objeto de estoque aditivo.
Redefinir objeto de estoque – reverta o estoque ao seu estado inicial.
Limpar objeto de estoque – excluir um objeto de estoque.
Adicionar à árvore da estação – copie o estoque em seu estado atual como modelo na árvore da estação do RoboDK.
Visível – alternar a visibilidade do estoque.
Mostrar faces – mostrar as faces do estoque bruto.
Cor da face... – defina a cor padrão para as faces.
Mostrar arestas – exibe as arestas do material bruto.
Ativar simulação de remoção de material
A simulação de remoção de material é ativada automaticamente. No entanto, é possível controlá-la manualmente usando o comando CAM-Ativar cortador/extrusora.
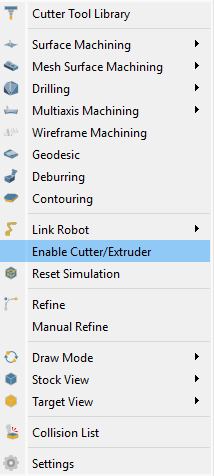
Além disso, é necessário verificar se a configuração CAM-Configurações-Simulação-Ativar corte está ativa.
Redefinir simulação
O comando de reinicialização da simulação reverte o bruto ao seu estado inicial.

Visualização do alvo
É possível comparar o estado atual do estoque com o modelo de alvo. Para isso, primeiro é necessário definir o modelo de alvo usando CAM-Visualização de destino-Definir objeto de destino e, em seguida, aplicar CAM-Modo de desenho-Mapa de desvio.
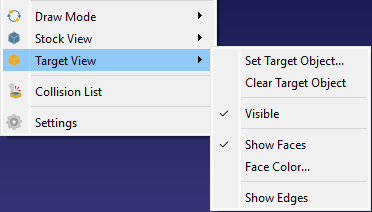
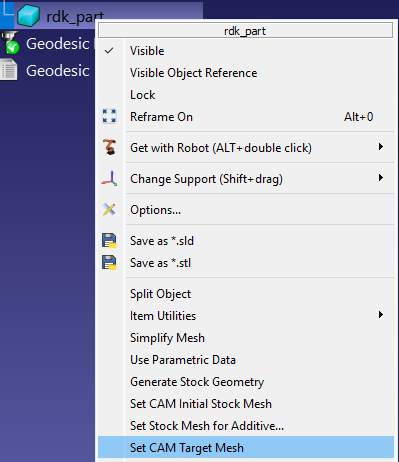
Para definir o objeto alvo, você também pode clicar com o botão direito do mouse no modelo na árvore da estação e selecionar o comando Definir Malha Alvo CAM.
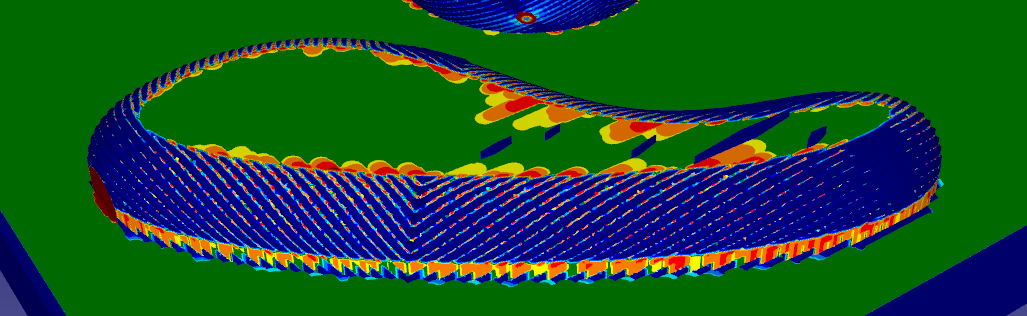
Mapa de desvio
O mapa de desvio mostra a diferença relativa usando uma escala de cores que varia do verde, indicando nenhuma diferença, ao vermelho, indicando a maior diferença.
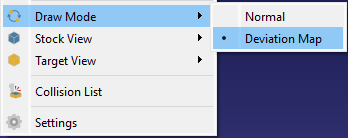
Selecione CAM-Desenho Mode-Deviation Map para exibir o mapa de desvio.
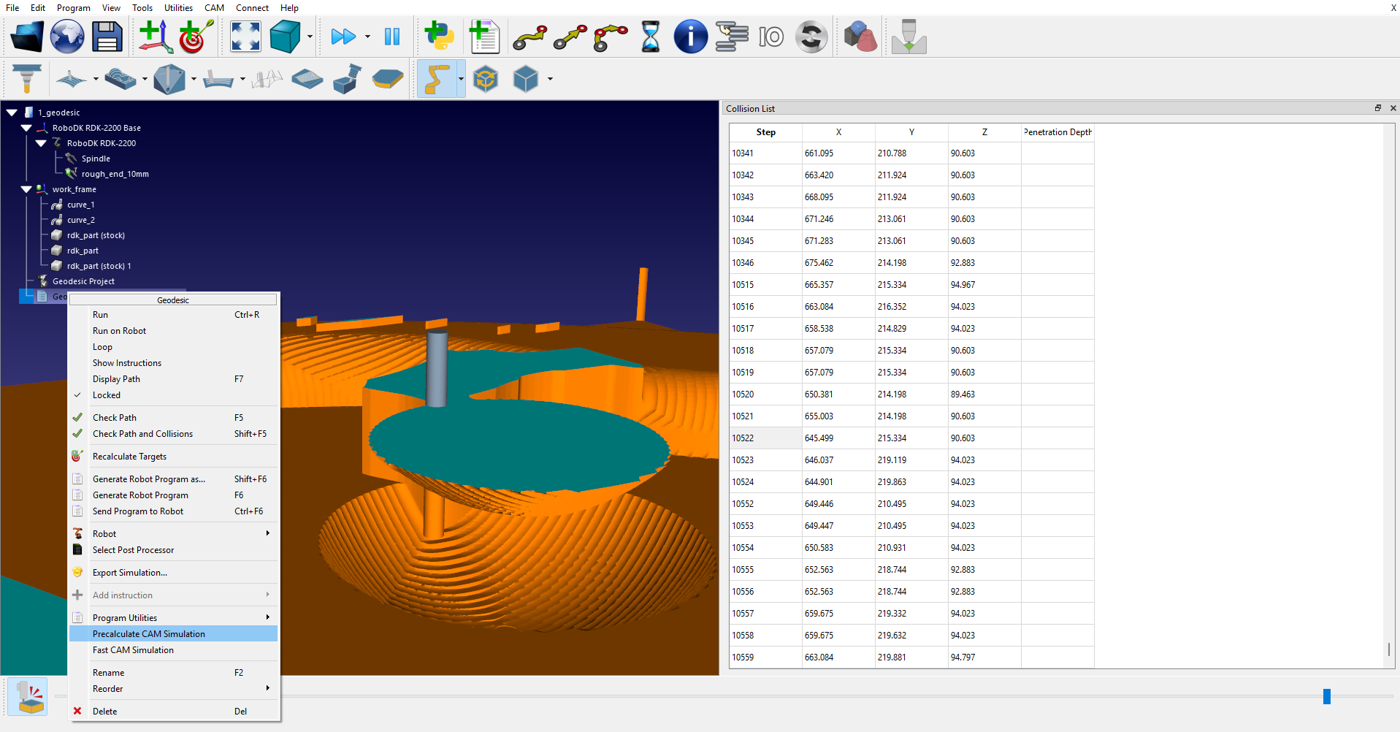
Lista de colisões
A lista de colisões mostra a sequência de colisões entre as partes não cortantes da ferramenta de corte (por exemplo, suporte) e a peça de trabalho durante a usinagem.
Selecione CAM-Lista de colisões para exibir a lista de colisões.
Refinar/Refinar manualmente
Com a opção Refinar ativada, é possível obter uma visualização da superfície de maior qualidade durante a simulação (isso pode afetar o desempenho da renderização).
Usando o comando Refinar manualmente, você pode melhorar a visualização das superfícies uma vez após pressioná-lo.

Selecione CAM-Refinar / CAM-Refinar manualmente para realizar a operação de refinamento.
Simulação CAM rápida
É possível executar uma simulação rápida da remoção de material. Para isso, clique com o botão direito do mouse no programa de alvo e selecione o comando Simulação CAM rápida.
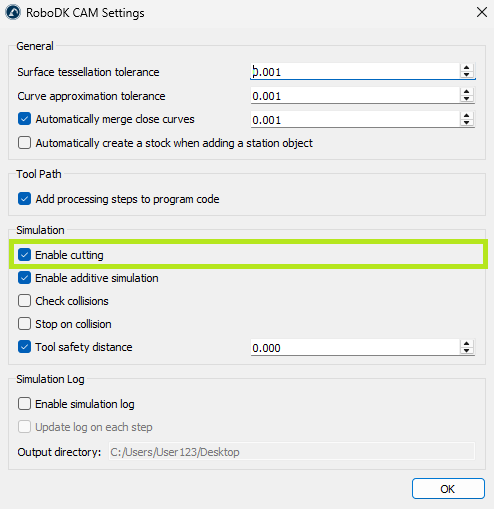
Configurações
Ao clicar em Configurações CAM, você poderá ajustar as configurações padrão do RoboDK CAM.
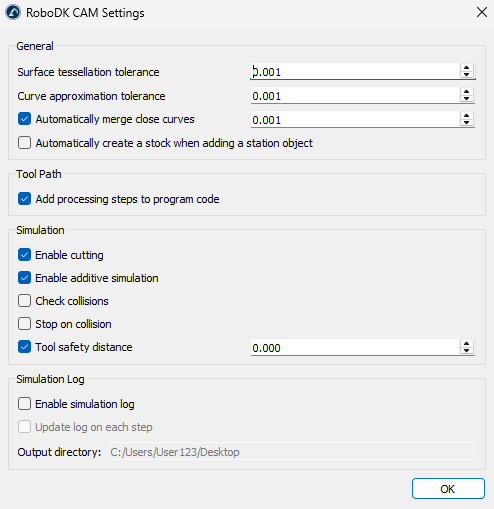
Geral
O grupo Configurações gerais inclui configurações de tolerância para importação de modelos. Além disso, é possível ativar a opção Criação automática de estoque, que exibirá a caixa de diálogo correspondente sempre que você adicionar qualquer modelo à estação.
Trajetória da ferramenta
O grupo de configurações do Caminho da ferramenta inclui a opção Adicionar etapas de processamento ao código do programa. Quando essa opção está ativada, informações adicionais relacionadas ao processo de usinagem serão adicionadas ao programa gerado.
Simulação
O grupo de configurações Simulação inclui parâmetros que permitem a simulação de remoção de material/adição de material e verificação de colisão. O parâmetro Distância de segurança da ferramenta pode ser usado para especificar uma distância adicional entre as partes não cortantes da ferramenta de corte e o material. Essa distância será levada em consideração durante a verificação de colisão.
As superfícies de colisão serão marcadas em vermelho.
Log
O grupo de configurações Log da simulação inclui parâmetros de log que podem ajudar a investigar problemas relacionados à simulação.