Adicionar novos pontos ao mapa
Qualquer novo ponto pode ser adicionado ao roteiro do PRM sem a necessidade de gerar novamente o mapa inteiro. Isso significa que o roteiro só precisa ser completamente gerado se novos objetos forem adicionados ao espaço de trabalho ou se os objetos existentes forem movidos.
Quando um novo ponto é adicionado ao roteiro, o algoritmo PRM tentará conectá-lo a um número de pontos existentes já dentro do roteiro com um conjunto de novas bordas. É possível definir um número padrão de bordas para novos pontos diferente do número escolhido para a construção inicial do roteiro.
O número máximo de bordas para novos pontos pode ser definido usando o seguinte processo
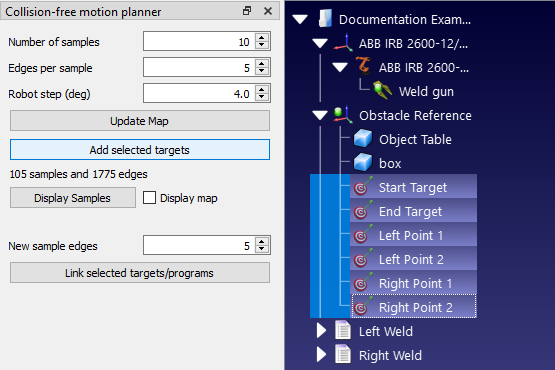
1.Abra o painel Planejador de movimento sem colisões acessando o menu Utilitários ➔ Planejador de movimento sem colisões ➔ Criar mapa sem colisões ou clique na pequena seta ao lado de 
2.Digite o número de bordas na caixa denominada Novas bordas de amostra. O padrão é 5.
Há duas maneiras de adicionar novas metas ao roteiro:
1.Selecione os pontos na árvore da estação. Vários pontos adjacentes podem ser selecionados de uma vez clicando no ponto mais alto, mantendo pressionada a tecla Shift e, em seguida, clicando no ponto mais baixo. Vários pontos não adjacentes podem ser selecionados mantendo pressionada a tecla Ctrl. Em seguida, clique em Adicionar Pontos selecionados no painel Planejador de movimento sem colisão.
2.Basta usar o mesmo método para vincular pontos selecionados ou vincular programas selecionados descrito nas seções anteriores (Vincular Pontos e Vincular Programas). Qualquer Ponto que ainda não esteja presente no roteiro será adicionado automaticamente.