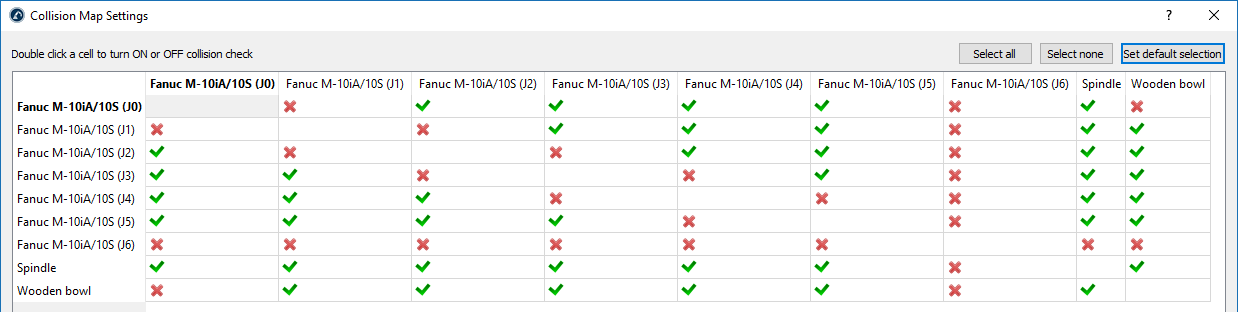
Collision Map
Você pode especificar se a interação entre qualquer par de objetos precisa ser verificada quanto a colisões.
Selecione Ferramentas ➔
Por padrão, o RoboDK verifica as colisões entre todos os objetos em movimento na estação, incluindo todos os links, objetos e ferramentas do robô. Como exceção, as articulações do robô não são verificadas quanto a colisões, pois podem estar sempre em contato.
Dica: Clique duas vezes na caixa na diagonal para verificar/desmarcar as colisões de um objeto específico com todos os outros objetos.
Dica: se a simulação ficar mais lenta devido à verificação de colisões, talvez seja melhor reduzir o número de verificações para usar menos processamento do computador na verificação de colisões.