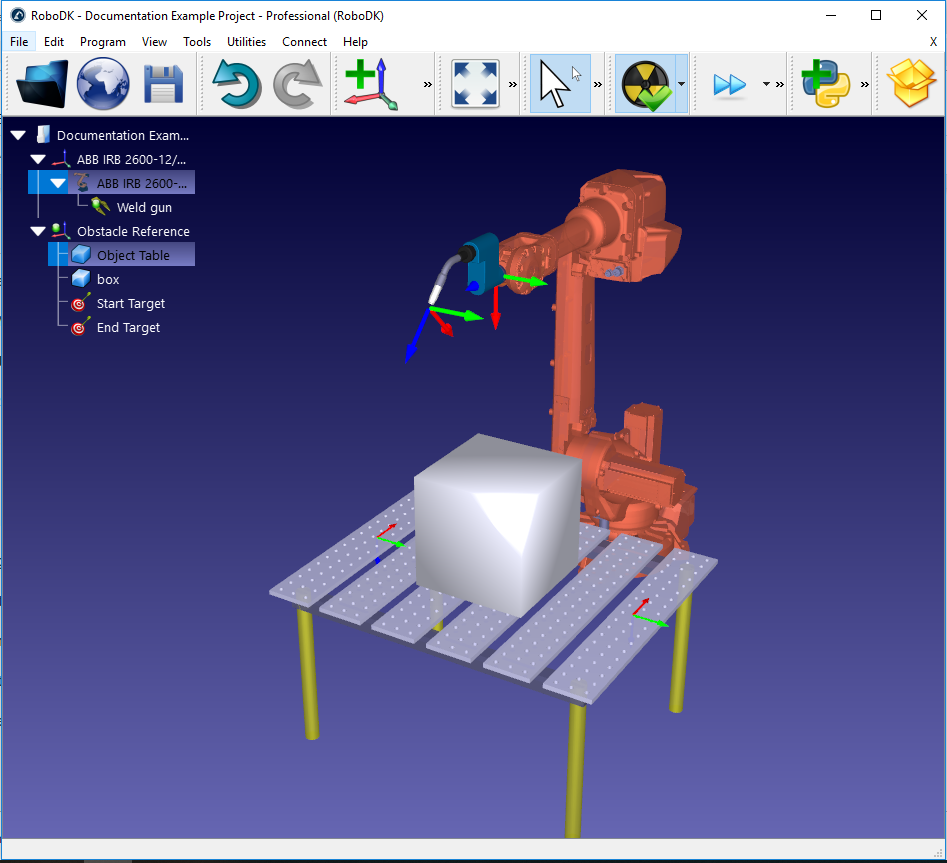
Configuração para planejamento de movimento
Para usar o planejador de movimento, é necessário que haja um robô, de preferência com uma ferramenta. Também faz sentido ter pelo menos um objeto dentro do espaço de trabalho, caso contrário, não será necessário evitar colisões. Pode ser útil ter pelo menos dois pontos atribuídos que servirão como locais de início e fim para o caminho sem colisão gerado.
O exemplo de configuração de soldagem pode ser criado usando o seguinte processo:
1.Selecione um robô:
a.Selecione Arquivo ➔
b.Use os filtros para encontrar seu robô. Por exemplo, selecione o ABB IRB 2600-12/1.85 (escolha os seguintes filtros: ABB (marca), carga útil de 10-20 kg e alcance de 1500-2000 mm.
c.Selecione Download e o robô deverá aparecer automaticamente na tela principal.
2.Selecione uma ferramenta:
a.Na mesma biblioteca on-line, filtre por Tipo ➔ Ferramenta (clique em Redefinir filtro primeiro para remover os filtros anteriores)
b.Faça o download de uma ferramenta, por exemplo, a "Tocha de solda".
c.A ferramenta deve ser acoplada automaticamente ao robô
d.Depois que a ferramenta for carregada, a biblioteca on-line poderá ser fechada
3.Adicione um frame de referência:
a.Selecione Programa ➔
b.Selecione o novo frame de referência na árvore e pressione F2 para renomeá-lo para " Referência do Obstáculo"
4.Adicione alguns objetos:
a.Selecione Arquivo ➔
b.Selecione um objeto, como o "Object Table.wrl"
c.Arraste e solte o objeto na Referência de Obstáculo dentro da árvore de estações.
d.Selecione outro objeto, como "box.stl", e arraste-o também para a Referência do Obstáculo.
e.Mova a mesa para a frente do robô fazendo o seguinte:
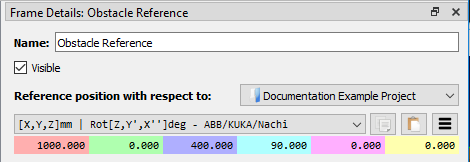
i.Clique com o botão direito do mouse na referência do obstáculo e escolha "Opções" (ou clique duas vezes na referência na árvore) para abrir o painel Detalhes do Frame
ii.Insira os seguintes valores no painel denominado Posição de referência em relação a: Projeto: 1000, 0, 400, 90, 0, 0
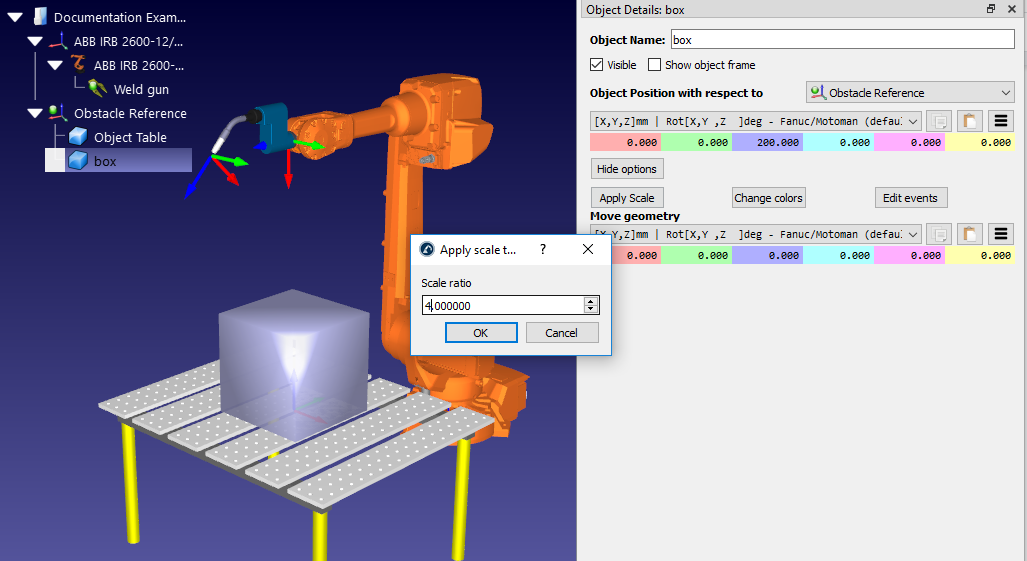
f.Se necessário, aumente o tamanho e a posição do seu objeto (por exemplo, a "caixa") seguindo estas etapas:
iii.Clique com o botão direito do mouse no objeto na árvore da estação e escolha Opções (ou simplesmente clique duas vezes no objeto na árvore) para abrir o painel Detalhes do objeto
iv.Dimensione a caixa clicando em Mais Opções ➔Aplicar escala e digite "4.0" na proporção da escala
v.Mova a caixa para a mesa inserindo os seguintes valores no painel denominado Posição do objeto em relação à referência do obstáculo: 0, 0, 200, 0, 0, 0
5.Criar metas:
a.Selecione o programa ➔ 
b.Selecione o novo Ponto na árvore de estações e selecione F2 para renomeá-lo como Ponto inicial
c.Mova o ponto fazendo isso:
vi.Clique com o botão direito do mouse no Ponto na árvore da estação e escolha Opções (ou pressione F3) para abrir o painel Ponto Inicial.
vii.Insira os seguintes valores na posição do ponto com relação aos painéis de referência do obstáculo: 500, 0, 0, 90, 0, 180
d.Crie um segundo ponto, da mesma forma, e renomeie como Ponto final. Usando o mesmo método anterior, mova-o para o local: -500, 0, 0, 90, 0, 180