Detecção de colisão
Selecione Ferramentas ➔
Siga estas etapas para verificar com segurança se há colisões em um programa:
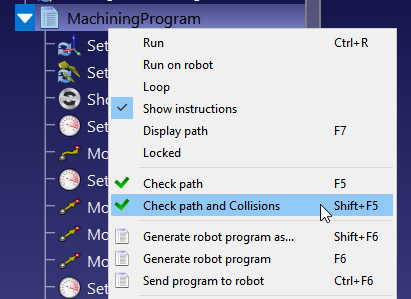
1.Clique com o botão direito do mouse em um programa.
2.Selecione Verificar trajetória e colisões (Shift+F5). Essa opção verifica rapidamente se o caminho é viável (o mesmo que Verificar trajetória - F5) e, em seguida, valida se não há colisões.
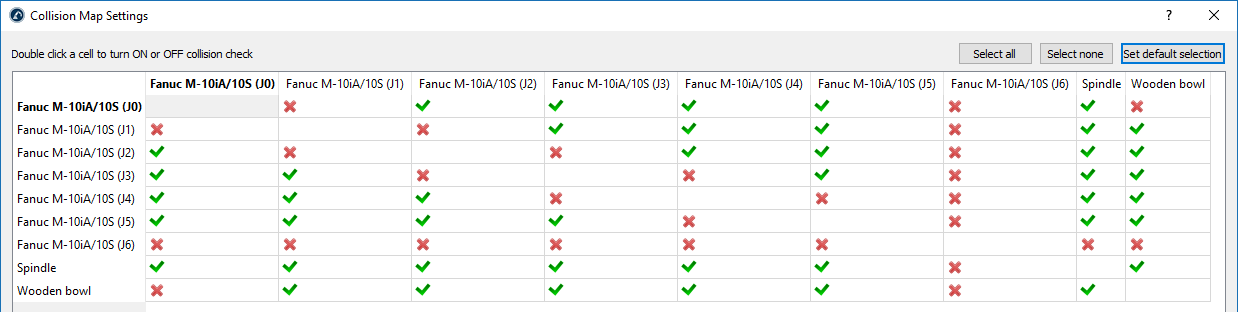
Collision Map
Você pode especificar se a interação entre qualquer par de objetos precisa ser verificada quanto a colisões.
Selecione Ferramentas ➔
Por padrão, o RoboDK verifica as colisões entre todos os objetos em movimento na estação, incluindo todos os links, objetos e ferramentas do robô. Como exceção, as articulações do robô não são verificadas quanto a colisões, pois podem estar sempre em contato.
Detecção de colisão mais rápida
A velocidade de detecção de colisão depende muito de vários fatores.
1.O número de pares de verificações definidas no mapa de colisão. Ter um mapa de colisão com menos verificações será mais rápido.
2.A etapa do robô usada para verificação de colisão. A etapa de colisão pode ser modificada no menu Ferramentas ➔ Opções ➔ Movimentação. Os movimentos lineares usam o passo em milímetros e os movimentos joint usam o passo em graus. Um passo maior proporcionará uma verificação de colisão mais rápida, mas o resultado poderá ser menos preciso.
3.Processamento do computador: mais potência do computador (CPU mais rápida) e mais threads de processamento permitirão que você tenha uma verificação de colisões mais rápida.
4.A complexidade dos arquivos 3D. As geometrias com maior nível de detalhe, como áreas arredondadas, geralmente exigem mais poder de computação. Simplificar essas geometrias e reduzir o número de triângulos ajudará a acelerar a verificação de colisões.
Você deve considerar as seguintes diretrizes para uma melhor verificação de colisões:
1.Escolha os formatos STEP ou IGES em vez dos arquivos STL para obter melhor desempenho e compatibilidade.
2.Simplifique a geometria o máximo possível.
3.Use o add-in Simplificar Malha para simplificar automaticamente a geometria complexa: https://robodk.com/addins.
4.Para identificar recursos agrupados incorretamente, ative as visualizações de caixas delimitadoras em Ferramentas ➔ Opções ➔ Outro ➔ Desenhar caixas delimitadoras (quando a verificação de colisão estiver ativada). Certifique-se de que as caixas delimitadoras não englobem vários elementos separados.
5.Evite usar o recurso "Simplificar Objeto..." encontrado em Ferramentas ➔ Opções ➔ Exibir. Ele consolida todas as superfícies em um único elemento, resultando em uma caixa delimitadora extensa, o que vai contra o ponto anterior.
6.Tenha objetos específicos de colisão no ambiente: duplique os objetos e remova as superfícies que não podem ser alcançadas ou importe uma versão com geometrias mais simples (por exemplo, estruturas convexas). Use o objeto original apenas para fins visuais e exclua-o do mapa de colisão.
7.Usando a API, atualize dinamicamente o mapa de colisão ou defina os itens como invisíveis quando eles não devem fazer parte da detecção de colisão.