Dicas e práticas recomendadas
O planejador de movimento é fácil de usar, mas há algumas práticas recomendadas que melhorarão o fluxo de trabalho de programação.
A fase de construção pode levar muito tempo para ser executada. Isso pode se tornar complicado durante os estágios iniciais da programação, quando o layout da célula do robô está mudando constantemente. Toda vez que um objeto é adicionado ao espaço de trabalho ou movido, o roteiro inteiro precisa ser gerado novamente.
Para reduzir o tempo gasto aguardando a geração do roteiro, é uma boa ideia usar parâmetros menores no início.
Por exemplo, você geralmente pode gerar um mapa sem colisões com o seguinte em 10 a 15 segundos:
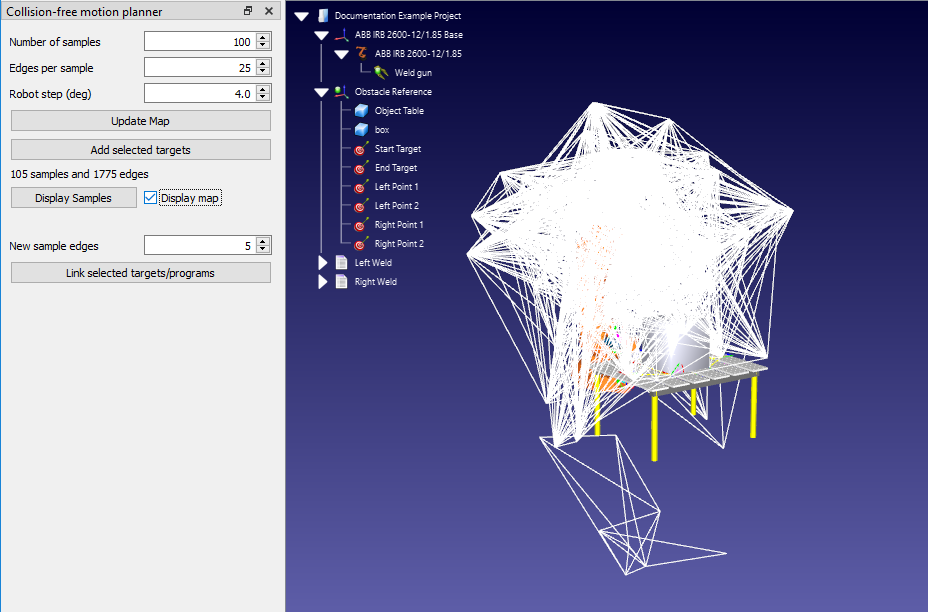
1.Número de amostras: 10.
2.Bordas por amostra: 5.
3.Passo do robô (graus): 4.0.
Isso não produzirá o movimento sem colisões mais eficiente, mas permitirá que o design da célula seja alterado muito mais rapidamente.
Quando as localizações de todos os objetos na célula tiverem sido decididas, um mapa maior poderá ser gerado (por exemplo, com os parâmetros padrão de 100, 25, 4.0).
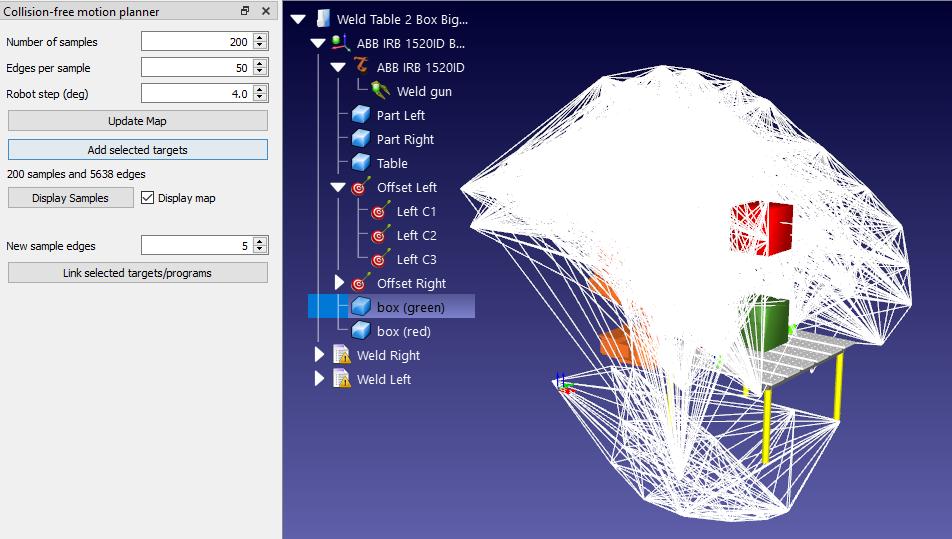
Por fim, antes de gerar o programa do robô, pode ser uma boa ideia gerar um roteiro ainda maior (por exemplo, com parâmetros de 500, 50, 2.0). Isso levará muito tempo para ser gerado, mas produzirá os movimentos mais eficientes.
A definição dos limites das juntas do robô (conforme descrito na seção anterior Restringir os limites dos eixos) tem um benefício duplo. Em primeiro lugar, pode tornar a fase de construção mais rápida em alguns casos. Em segundo lugar, garante que o roteiro realmente contenha locais que serão úteis para o programa do robô. É fácil esquecer essa etapa vital.
Definir adequadamente o mapa de colisão
A detecção de colisão é acionada quando dois objetos colidem. Você pode especificar a correlação entre cada objeto em movimento nas configurações do Mapa de Colisões. Reduzir o número de interações (marcas de verificação verdes) acelerará a verificação de colisão.
O tempo necessário para calcular trajetórias livres de colisão depende principalmente do tempo necessário para verificar se há colisões. Portanto, você deve seguir as práticas recomendadas para acelerar a verificação de colisões descritas na seção de detecção de colisões. Entre outras coisas, você pode aumentar o passo do robô para a verificação de colisões, restringir os limites das juntas ou simplificar a geometria 3D para acelerar a verificação de colisões.
O termo "prevenção de colisões" sugere que o planejador de movimento sempre evitará colisões em todas as situações. Isso certamente é verdade no ambiente de simulação. Entretanto, no mundo real, o robô ainda pode colidir com objetos se chegar muito perto deles. Isso geralmente ocorre devido a pequenas diferenças entre o robô simulado e o robô físico.
Um exemplo comum de tais colisões é quando o robô "pega" a borda de um objeto ao se afastar de uma tarefa. Isso geralmente pode ser evitado com a inclusão de um "offset" no programa. Consulte este artigo do blog para obter mais informações sobre o uso eficaz de offsets.
Nem todas as áreas do espaço de trabalho do robô são iguais. O robô terá mais "acessibilidade" em algumas áreas de seu espaço de trabalho do que em outras. Em áreas com alta capacidade de alcance, o robô poderá acessar pontos a partir de várias orientações. Em áreas com baixa acessibilidade, o robô só poderá acessar os pontos a partir de uma ou duas orientações.
Às vezes, o planejador de movimento não consegue encontrar um caminho entre dois pontos no espaço de trabalho. Muitas vezes, esse problema pode ser resolvido simplesmente aumentando o número de amostras no roteiro, mas nem sempre.
Se o planejador de movimento falhar continuamente em conectar pontos, certifique-se de que a tarefa esteja localizada dentro da área do espaço de trabalho do robô com maior capacidade de alcance. Visualize o espaço de trabalho do robô abrindo o painel do robô (clique com o botão direito do mouse no robô na árvore da estação e escolha Opções) e selecione Mostrar para a ferramenta atual na seção Espaço de trabalho.