Gerar roteiro
A "fase de construção" do planejador de movimento é realizada usando o seguinte processo, que gera um roteiro do espaço de trabalho do robô:
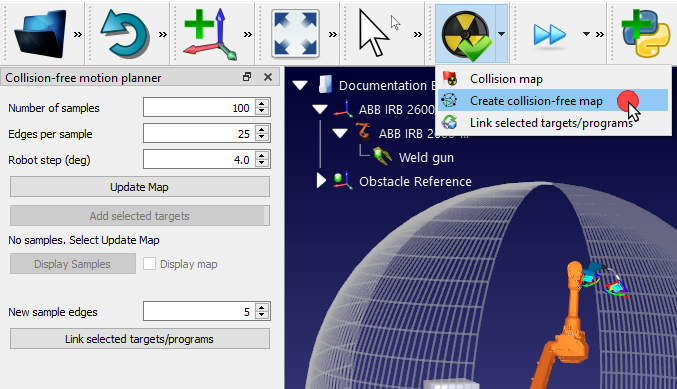
1.Abra o painel Planejador de movimentoS sem colisões acessando o menu Utilitários ➔ Planejador de movimentos sem colisões ➔ Criar mapa sem colisões ou clique na pequena seta ao lado de 
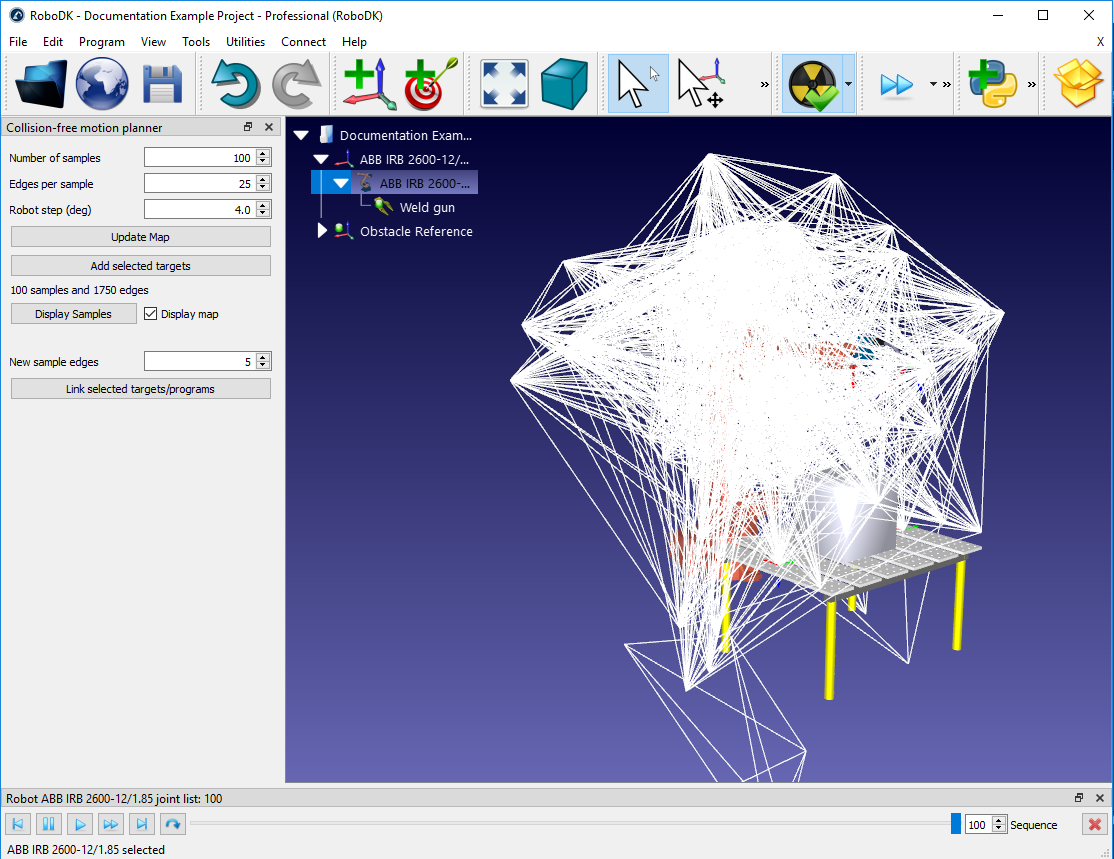
2.Insira novos parâmetros ou mantenha os padrões.
3.Clique em Atualizar mapa para gerar o roteiro .
O algoritmo PRM gerará um roteiro usando os parâmetros escolhidos. Quando terminar, o roteiro gerado poderá ser visualizado marcando a caixa Exibir mapa. Clicar em Exibir amostras moverá o robô por todas as amostras dentro do espaço de trabalho.