Prevenção de colisões para usinagem com robôs
Você pode ativar a prevenção automática de colisões para projetos de usinagem com robôs. O RoboDK movimentará automaticamente a ferramenta para encontrar um caminho livre de colisões.
Dica: A detecção de colisão para uma trajetória de usinagem com robô pode levar muito tempo para ser calculada. Certifique-se de restringir adequadamente o mapa de colisões para ajudar a acelerar o processo de detecção e prevenção de colisões.
Siga estas etapas para ativar a verificação automática de colisões e a prevenção de colisões para projetos de usinagem com robôs:
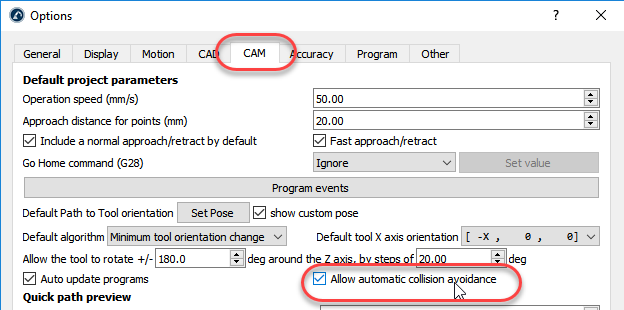
1.Selecione Ferramentas ➔ Opções ➔ CAM
2.Clique em Permitir prevenção automática de colisões
3.Clique duas vezes em seu projeto de usinagem com robô, impressão 3D, projeto de seguimento de curva ou seguimento de ponto.
4.Marque Evitar colisões: isso ativará a prevenção automática de colisões, alterando a orientação da ferramenta em torno do eixo Z, conforme descrito nos parâmetros de otimização.
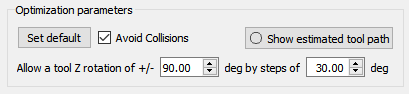
Importante: Essa opção tentará evitar automaticamente as colisões girando em torno do eixo Z da ferramenta. Certifique-se de que a parte cortante da ferramenta não seja verificada quanto a colisões contra a peça. Se quiser verificar se há colisões entre o suporte da ferramenta e a peça, talvez seja necessário dividir o fuso em duas ferramentas (uma usada para detecção de colisões e outra com informações adicionais de visualização, como a parte cortante).