Restringir os limites dos eixos
Não é comum que uma tarefa use todo o espaço de trabalho do robô. Ao criar um mapa PRM, geralmente é uma boa ideia restringir os limites de eixos do robô. Isso acelera o processo de geração do mapa e garante que os pontos dentro desse mapa estejam localizados no melhor lugar.
Para robôs de 6 eixos, os dois eixos mais frequentemente restringidas são:
1.Eixo 1 (o eixo da base) - A restrição desse eixo impede que o robô se mova muito para qualquer lado do espaço de trabalho.
2.Eixo 3 (o eixo do cotovelo) - A restrição desse eixo impede que o robô alterne entre as configurações de cotovelo para cima e para baixo.
Altere os limites do eixo usando o seguinte processo:
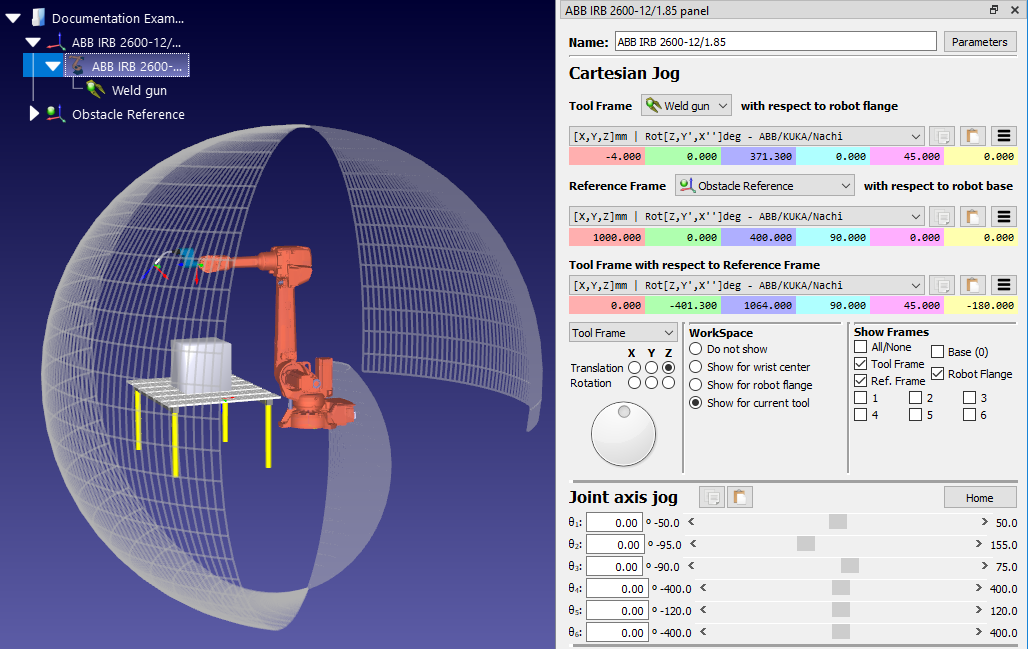
1.Clique com o botão direito do mouse no ícone do modelo do robô na árvore de estações (por exemplo, ABB IRB 2600-12/1.85) e selecione Opções... para abrir o painel do robô. Como alternativa, basta clicar duas vezes no nome do robô na árvore de estações.
2.Na seção Movimentar eixos, mova os controles deslizantes das articulações do robô que deseja restringir (por exemplo, θ1 e θ3) para encontrar onde deseja que os limites inferiores das articulações estejam.
3.Clique duas vezes em qualquer um dos limites inferiores do eixo dentro do jog do eixo. Por exemplo, se o limite de junta de θ1 for atualmente -180, clique duas vezes no número -180. Isso abrirá o painel Definir limites inferiores do eixo.
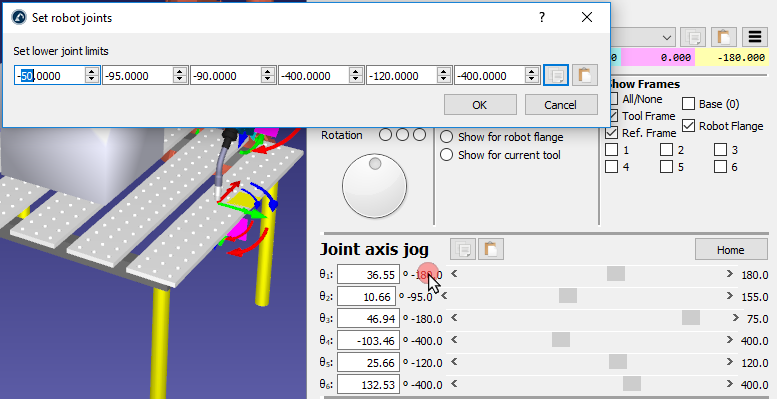
4.Defina os limites inferiores do eixo como θ1 = -50 e θ3 = -90.
5.Altere os limites do eixo e clique em OK.
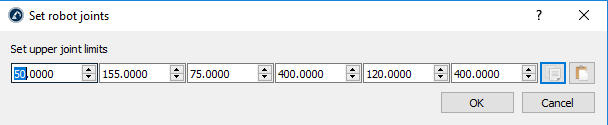
6.Usando o mesmo processo com os limites superiores do eixo, defina θ1 = 50.
Essa alteração pode ser vista ao visualizar o espaço de trabalho acessível do robô. Mostre o espaço de trabalho selecionando a opção Exibir para a ferramenta atual na seção Espaço de trabalho do painel do robô. Isso mostrará apenas a parte do espaço de trabalho que agora pode ser alcançada com os novos limites de eixos.