Calibração mão-olho
A calibração mão-olho é o processo de calibração da posição da câmera em relação ao flange ou à ferramenta do robô.
O RoboDK permite que você simule o processo de calibração mão-olho. Você pode usar o mesmo procedimento para calibrar câmeras reais em relação ao flange ou à ferramenta do robô.
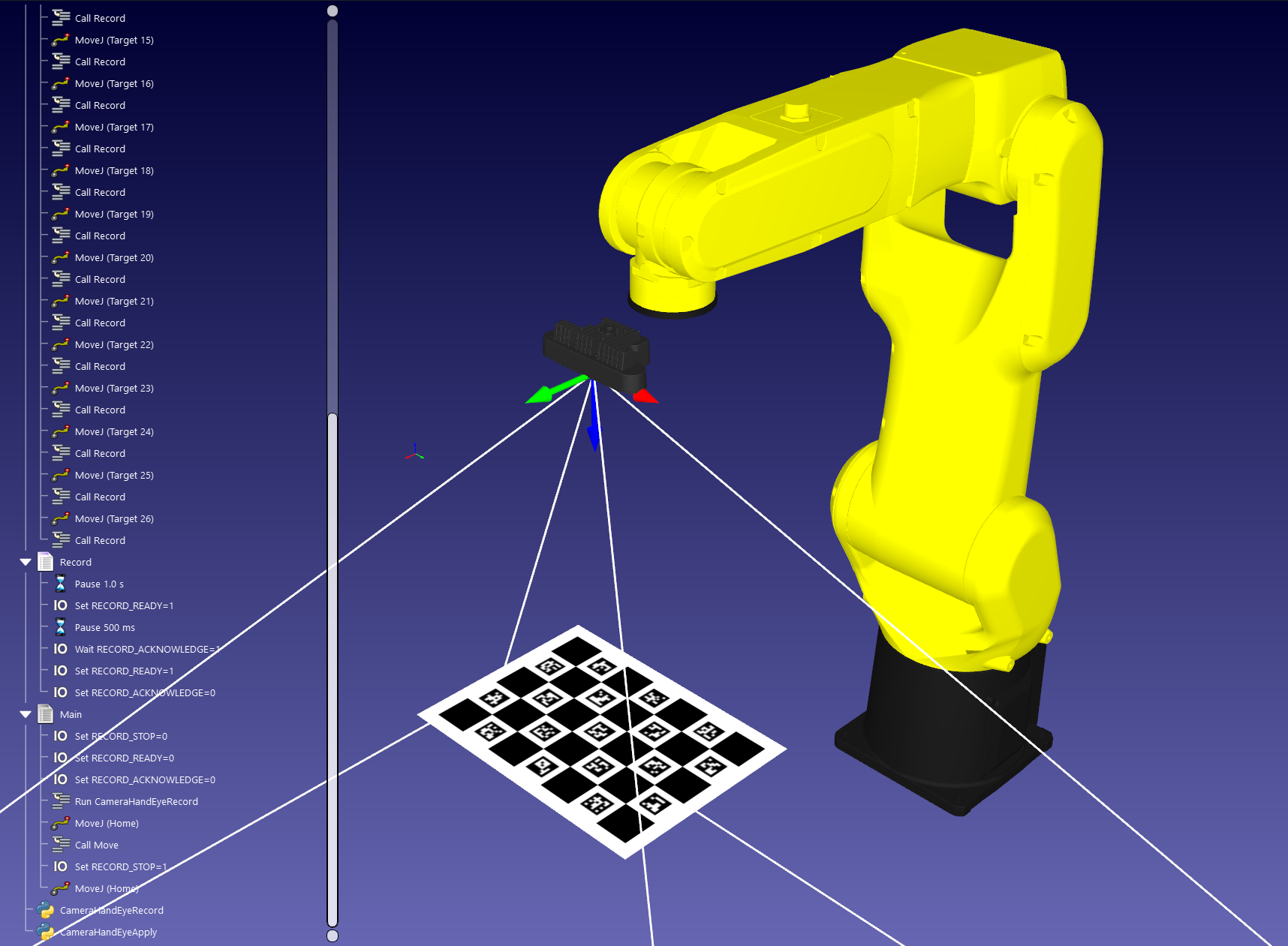
Você pode encontrar um exemplo totalmente funcional na seção de exemplos da API do RoboDK para Python: https://robodk.com/doc/en/PythonAPI/examples.html#camera-hand-eye-calibration.