Mold Machining
Introdução
Este exemplo ajudará você a criar um projeto simples de usinagem de 3 eixos no RoboDK usando o plug-in Mastercam. Neste exemplo, um robô Motoman com uma ferramenta de corte é simulado e programado para usinar um molde simples usando o robô como uma máquina de 3 eixos. Você aprenderá a transformar um programa CNC em uma simulação de robô e em um programa de robô.
Vídeo: Programação de robôs com o Mastercam para uma aplicação de usinagem de moldes de 3 eixos
Com o plug-in RoboDK para Mastercam, você pode configurar rapidamente projetos de usinagem de robôs diretamente do Mastercam para o RoboDK. Esse plug-in permite que você programe mais de 50 fabricantes de robôs diferentes e 500 robôs diretamente do Mastercam.
O plug-in RoboDK para Mastercam suporta NCI (arquivos nativos Mastercam pré-processados) e arquivos APT CLS e G-code padrão. O plug-in é gratuito se você tiver adquirido uma licença do RoboDK.
Usinagem de robô de molde de 3 eixos
Para iniciar o projeto, primeiro você terá de selecionar o exemplo de usinagem de moldes de 3 eixos do RoboDK na biblioteca padrão.
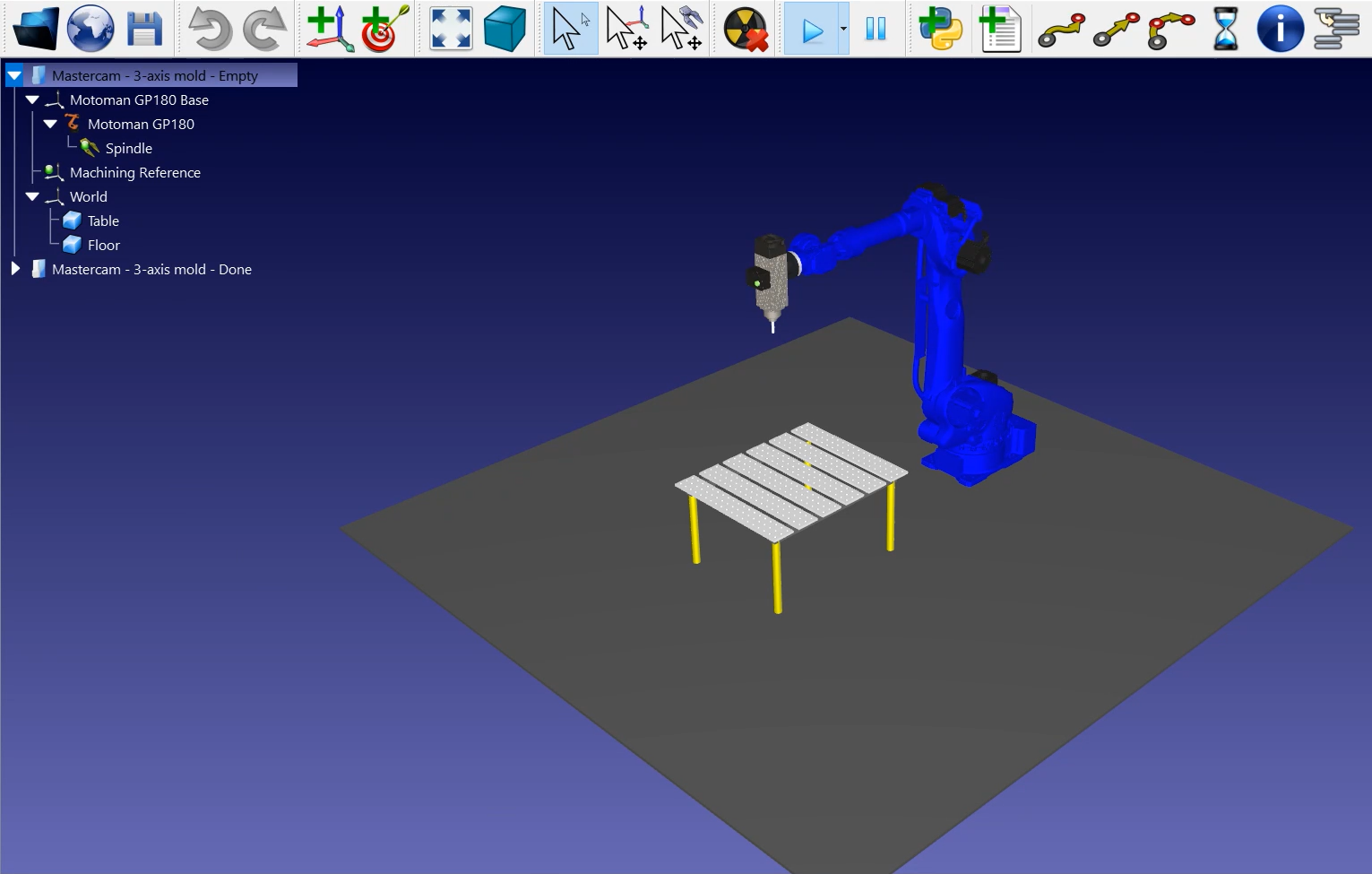
Configurações do RoboDK
Este exemplo usa o robô Motoman GP180, uma ferramenta de corte montada em um eixo e uma mesa para manter a peça no lugar.
Carregue a estação:
1.Selecione Arquivo ➔
2.Localize o exemplo de usinagem de molde de 3 eixos na seção de exemplos do RoboDK:
C:/RoboDK/Examples/ Plugin-Mastercam-3-Axis-Mold-Machining.rdk.
Agora que você carregou a estação, pode abrir o Mastercam e carregar o projeto de C:/RoboDK/Other/Plugin-Mastercam/Examples/Mold.mcam.
Percurso de ferramenta de usinagem no Mastercam
Abra o seu objeto 3D no Mastercam e inicie a simulação de corte. Neste exemplo, o objeto 3D é uma peça de metal de molde com um caminho de corte já criado usando as ferramentas do Mastercam
Para simplificar esse exemplo, o número de passes necessários para usinar essa peça foi bastante reduzido. Na realidade, você teria muito mais linhas ou caminho de corte no molde e não conseguiria realmente ver a ferramenta em ação.
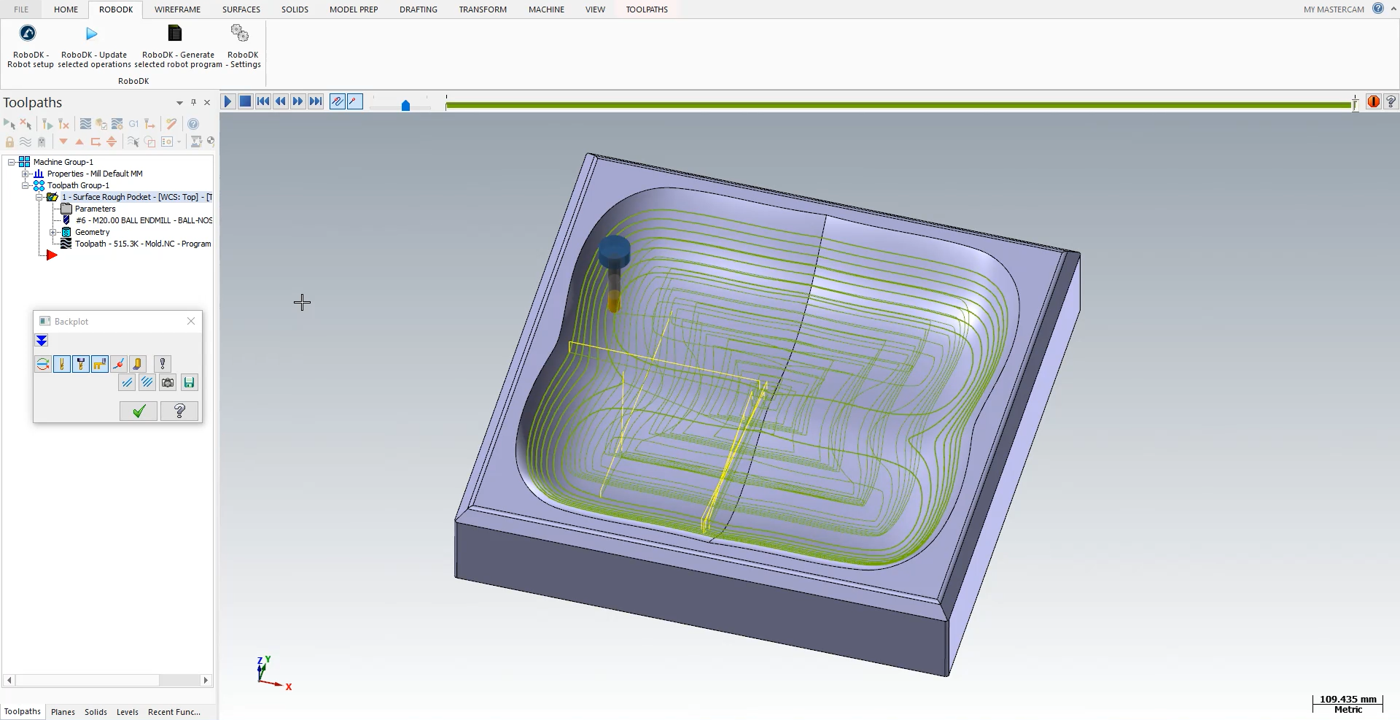
A simulação de corte do Mastercam mostra todos os movimentos que a ferramenta precisa fazer durante o programa.
Siga as próximas etapas para carregar sua peça no RoboDK:
1.Selecione a guia RoboDK e selecione RoboDK - Configuração do robô.
2.Selecione Carregar Peça.
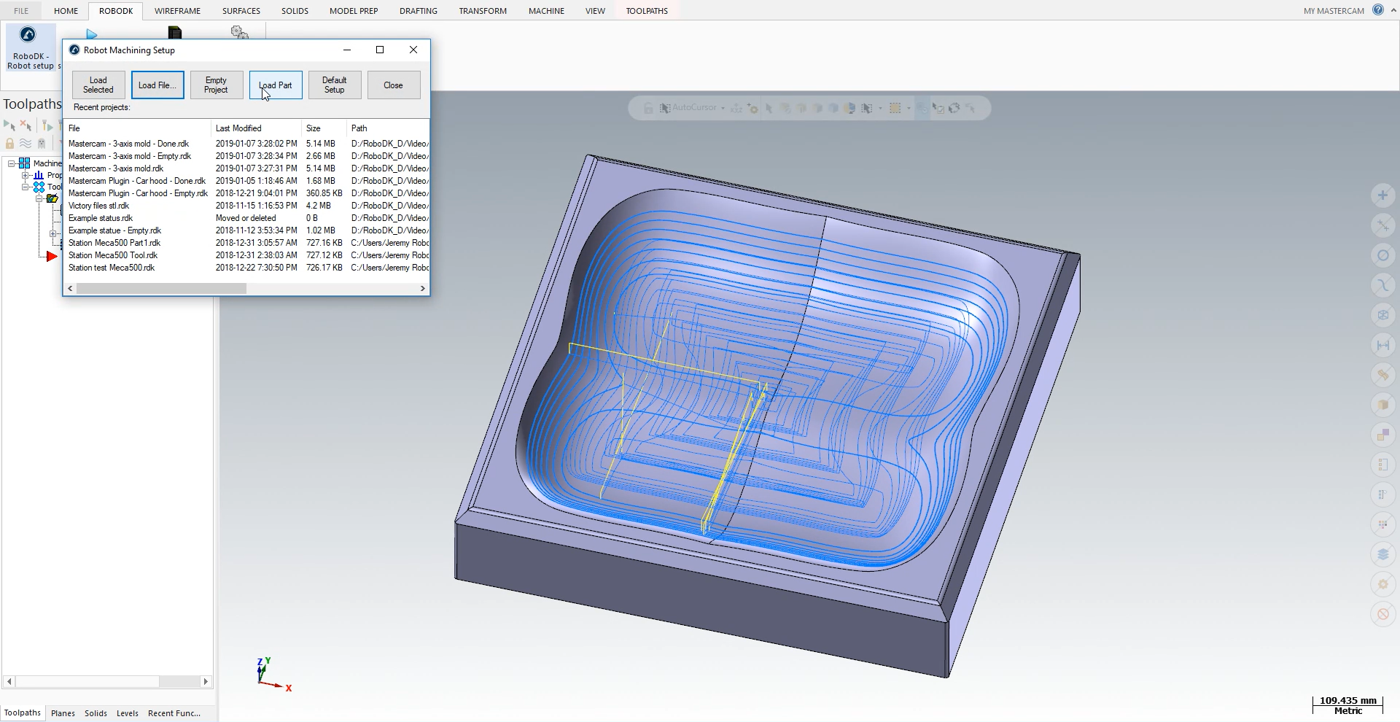
Você deverá ver a peça carregada no frame de referência ativo (Machining Reference) na mesa da estação RoboDK.
O próximo passo é importar o caminho de corte do Mastercam para o RoboDK.
1.Selecione a guia RoboDK no Mastercam.
2.Selecione RoboDK - Atualize as operações selecionadas.
3.Vá para o RoboDK.
Usinagem de robôs no RoboDK
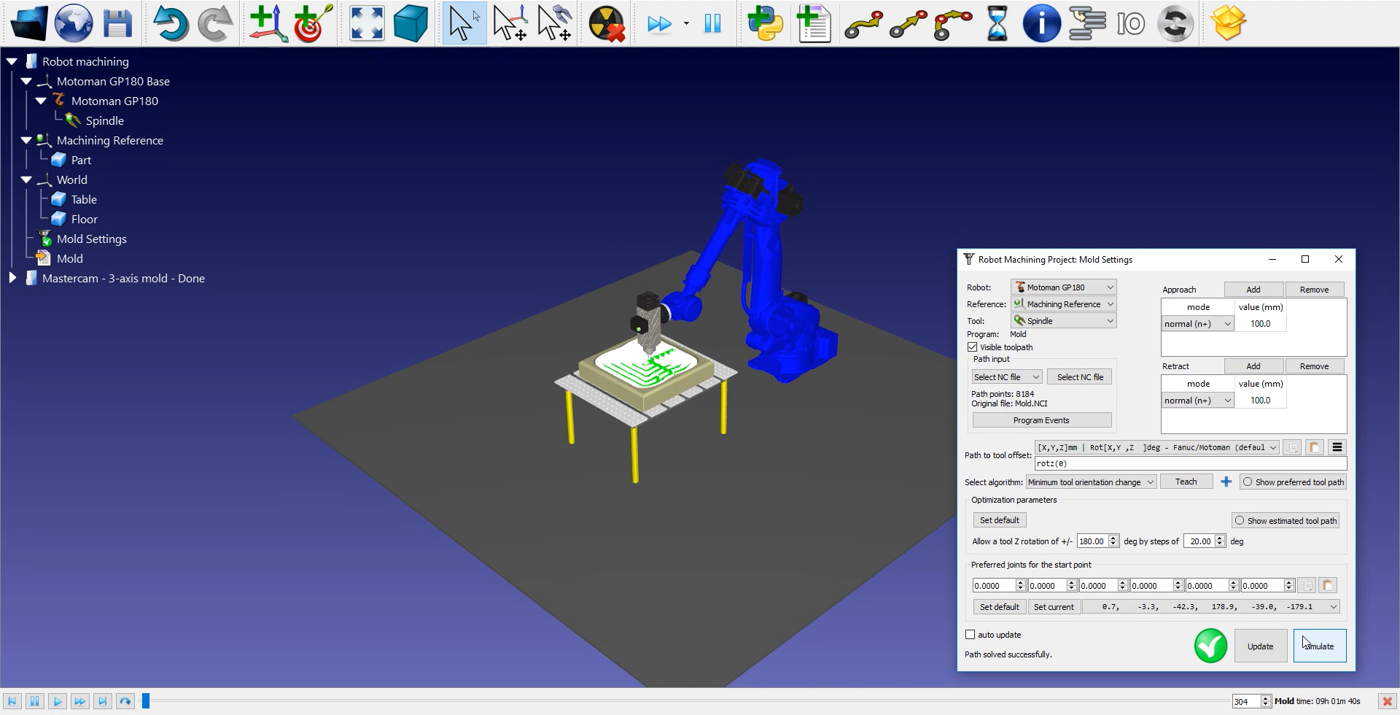
Depois que o caminho de usinagem do robô tiver sido importado para o RoboDK, você deverá ver o caminho da ferramenta de usinagem do robô anexado à referência do molde da sua estação RoboDK. Em
Você também pode ajustar o valor dos movimentos de aproximação e retração antes e depois do caminho de corte. Um valor de 100 mm deve ser suficiente neste exemplo. Se houver risco de colisões, você pode aumentar esses valores o quanto quiser dentro da faixa de trabalho do robô.
A próxima etapa é verificar se a ordem em que as seções do caminho serão executadas está correta, selecionando

Siga estas etapas para ajustar a orientação da ferramenta:
1.Clique duas vezes em
2.Selecione Exibir trajetória preferida de ferramenta. Algumas ferramentas fantasmas aparecerão, conforme mostrado na imagem abaixo. Elas representam a posição de sua ferramenta ao longo do caminho.
3.Modifique o valor rotz (0) rolando a roda para cima até 90 graus. Você verá o valor rotz mudando e a posição de parada fantasmas mudando com ele.
4.Selecione Atualizar➔ Simular.

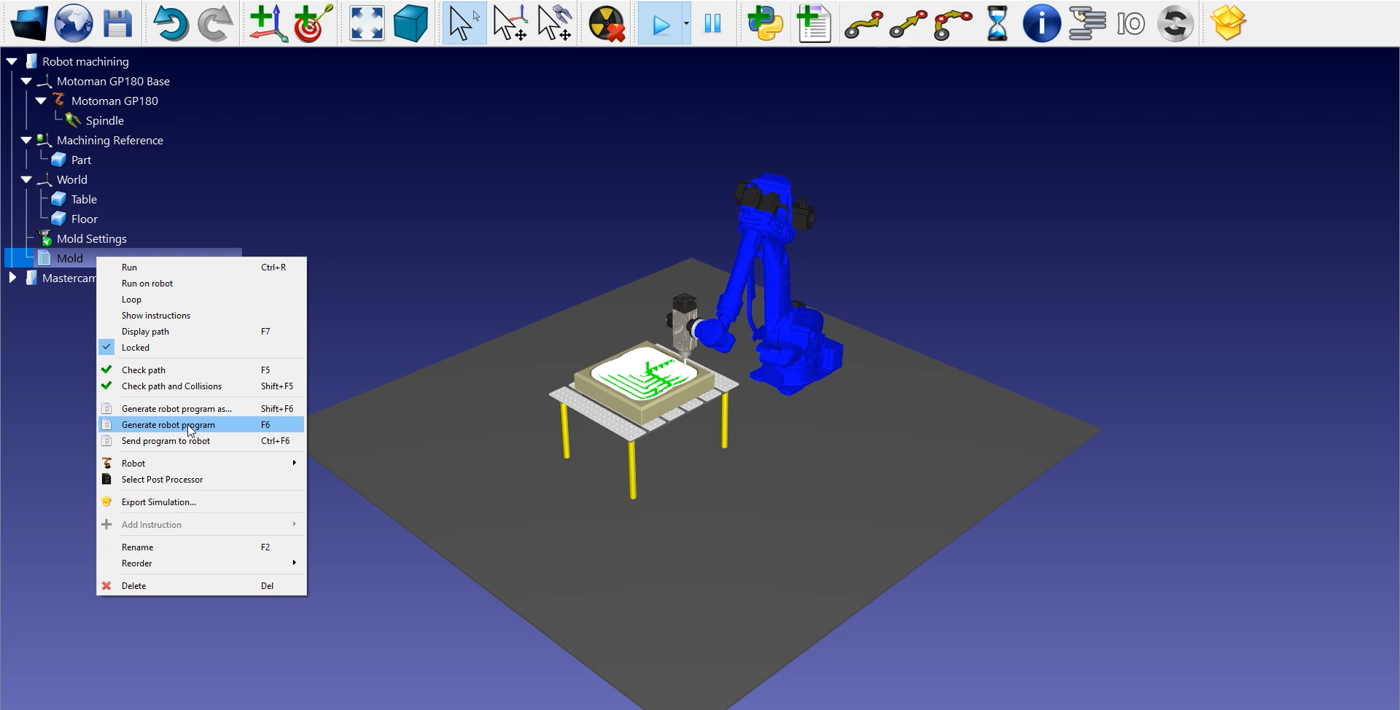
Para gerar o programa do robô, certifique-se de usar o pós-processador correto. Clique duas vezes no robô
Por fim, clique com o botão direito do mouse em
O arquivo JBI do Motoman agora está pronto para ser transferido para o controlador do robô.