Alterar o pós-processador
Cada robô tem um pós-processador padrão associado a ele que deve gerar um código válido para o controlador do robô. Você pode alterar facilmente a saída do programa, dependendo do controlador do robô que estiver usando.
Siga estas etapas para alterar o pós-processador:
1.Clique com o botão direito do mouse em um programa ou robô.
2.Selecione Selecionar pós-processador para alterar o pós-processador.
Essa configuração será aplicada a todos os programas que usam o mesmo robô.
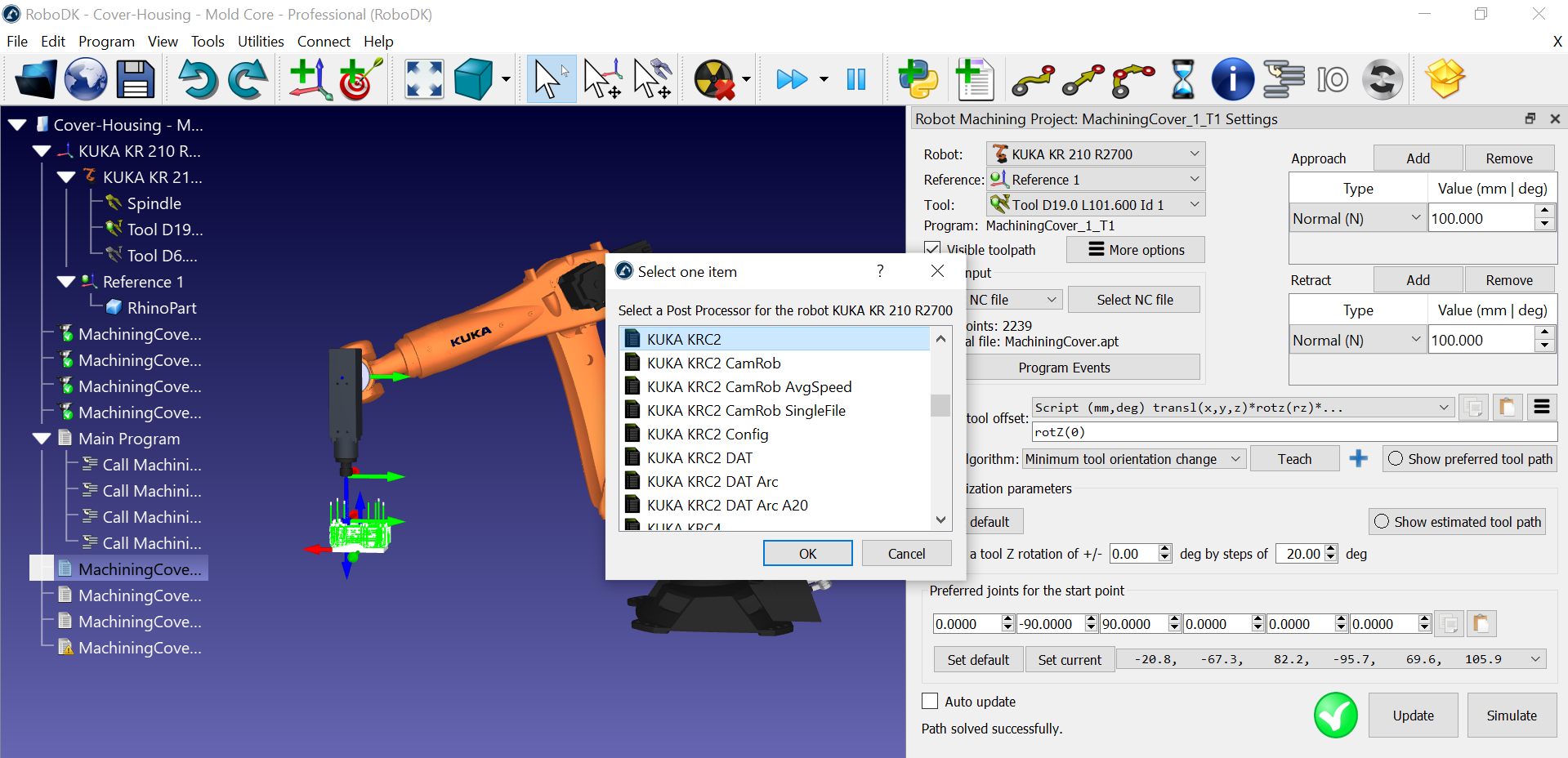
Observação: o RoboDK inclui mais de 80 pós-processadores para dar suporte a mais de 50 fabricantes de robôs.
Se você tiver um robô KUKA, deverá ver o pós-processador KUKA KRC2 selecionado por padrão. Isso também deve ser compatível com os controladores KUKA KRC4. Se preferir, você ainda pode selecionar o pós-processador KUKA KRC4 se tiver um controlador KRC4.