Criar caminho de usinagem do robô
Você pode criar a simulação de usinagem do robô no RoboDK depois de carregar o arquivo APT, selecionando Update. Isso permite que você veja se o robô pode realizar a operação de fabricação.
Este exemplo é uma operação simples de usinagem de 3 eixos, e as configurações padrão nos dão um resultado válido. O projeto de usinagem do robô permite que você controle como o robô se comporta ao longo do caminho da ferramenta de usinagem.
Você pode seguir estas etapas para atualizar as demais operações de usinagem do robô:
1.Selecione uma ou mais operações de usinagem do robô (manter a tecla Shift pressionada permite que você gere vários itens na árvore).
2.Clique com o botão direito do mouse no(s) item(ns) selecionado(s).
3.Selecione Atualizar programas.
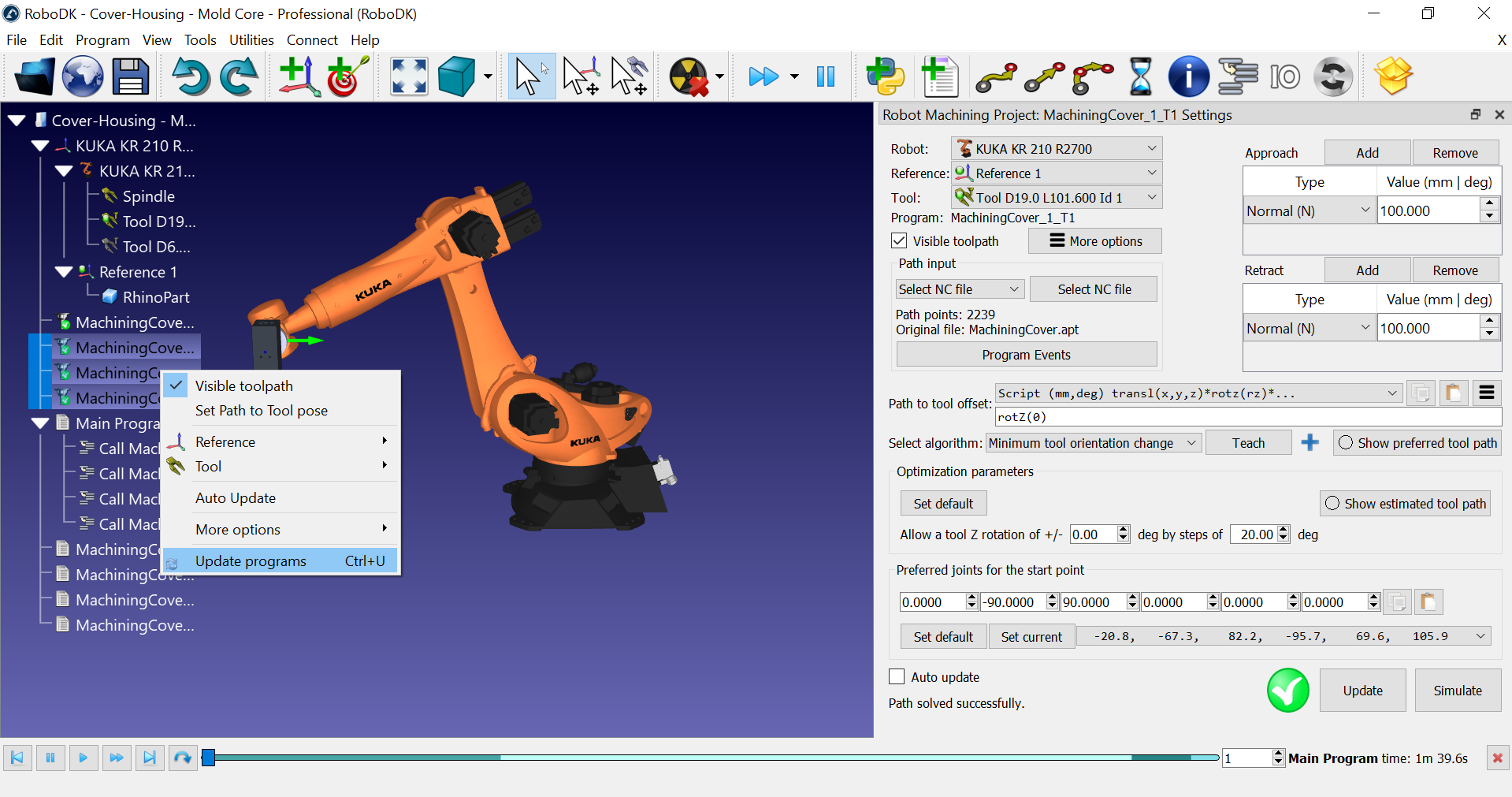
À medida que o RoboDK calcula o caminho de usinagem do robô, ele criará um novo programa de robô para cada operação de usinagem. Os ícones brancos representam os programas do robô. Esses programas são criados automaticamente pelo RoboDK. Você pode simular cada programa individualmente clicando duas vezes sobre ele na árvore.
O RoboDK também cria automaticamente um programa principal que você pode executar para simular todas as operações de usinagem do robô em ordem.