Gerar os programas do robô
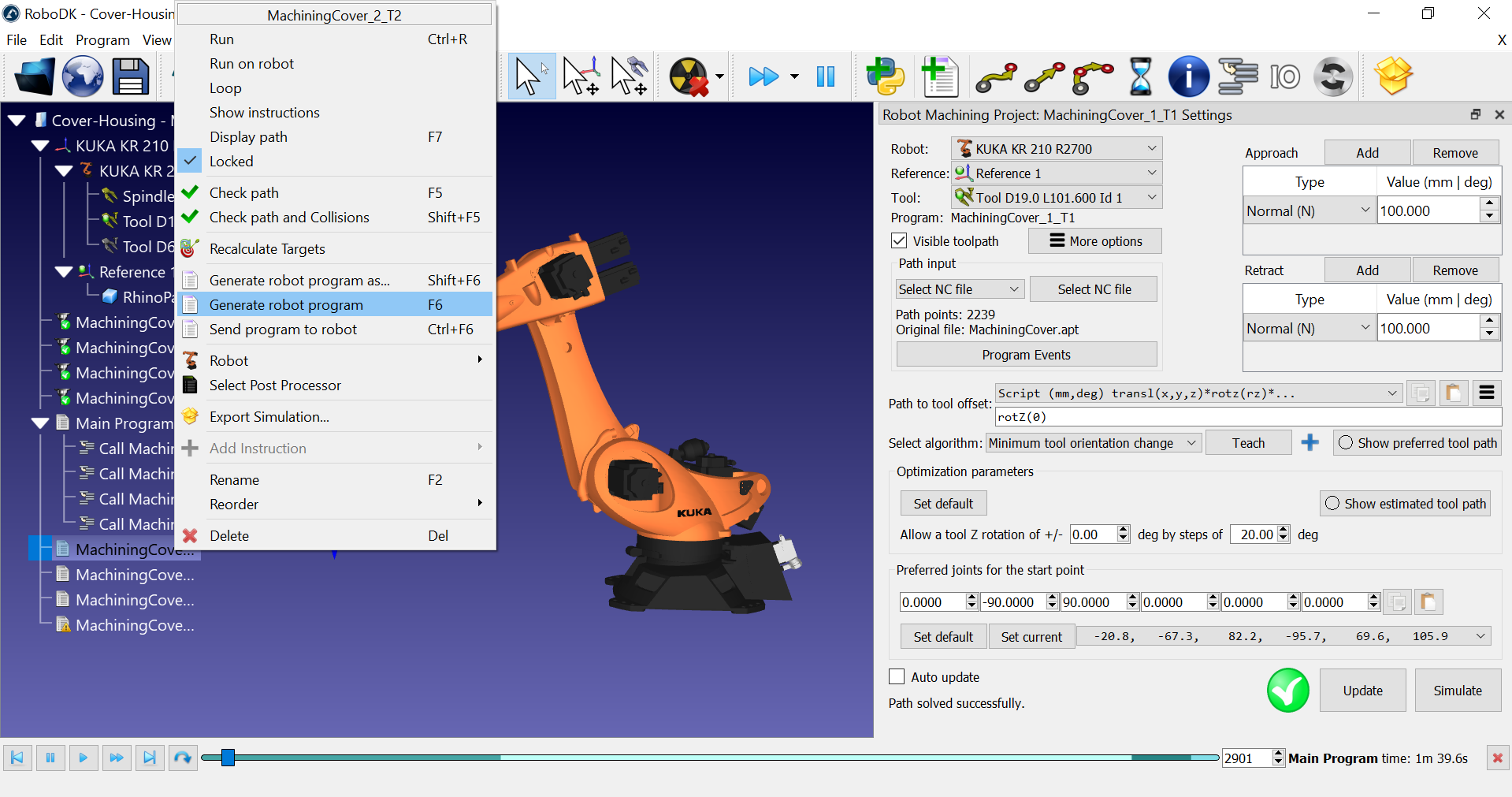
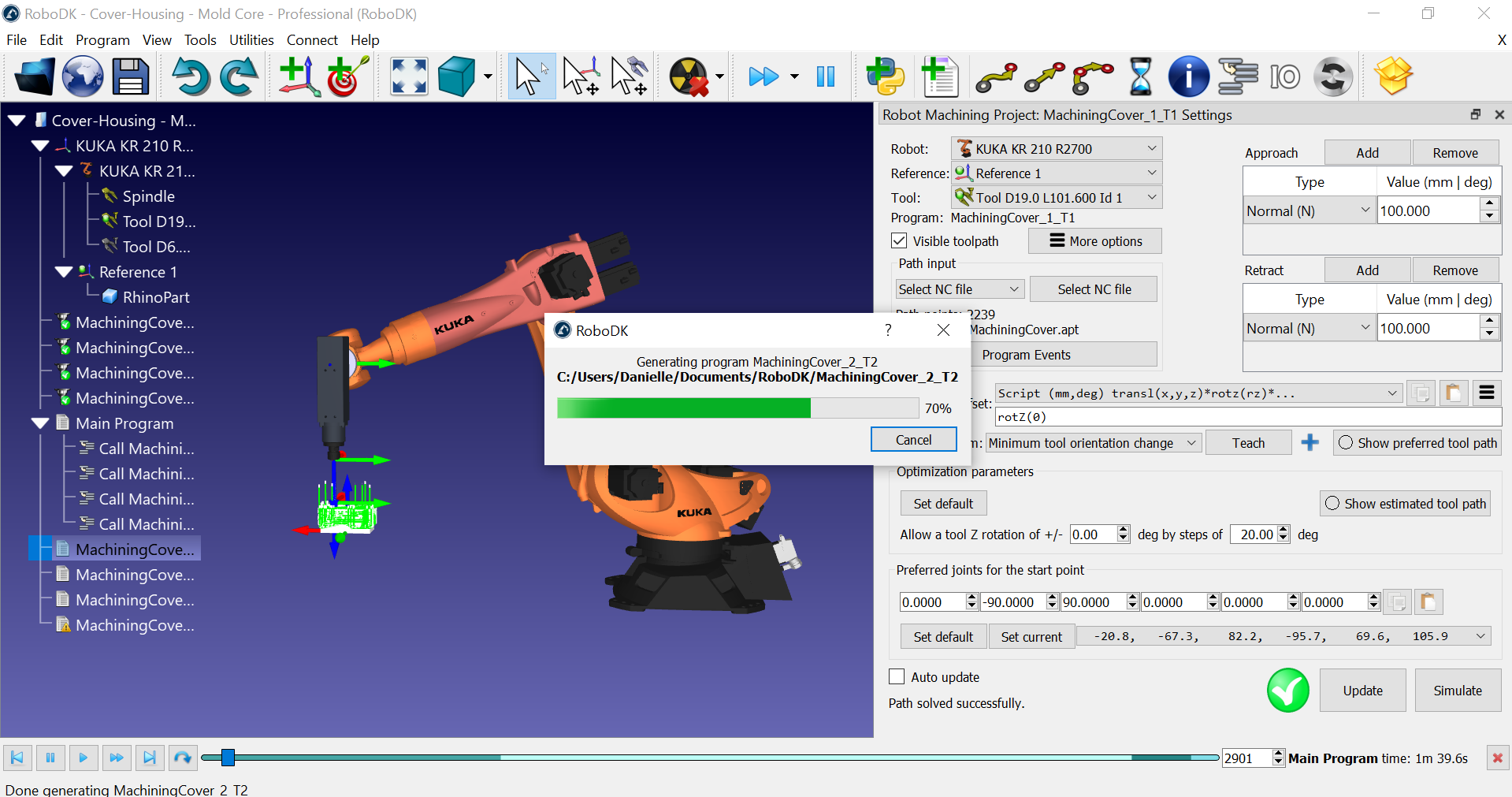
Você pode clicar com o botão direito do mouse em um ou mais programas e selecionar Gerar os programas do robô para gerar ou atualizar os programas (arquivos) do robô para o controlador do robô.
Neste exemplo, se estivermos usando um controlador de robô KUKA KRC, obteremos arquivos de programa SRC.
Você deve ver a referência e a ferramenta definidas no programa da mesma forma que as definiu no RoboDK.
Você também pode usar referência numerada e nomes de ferramentas para usar os valores armazenados no controlador com a respectiva ID.
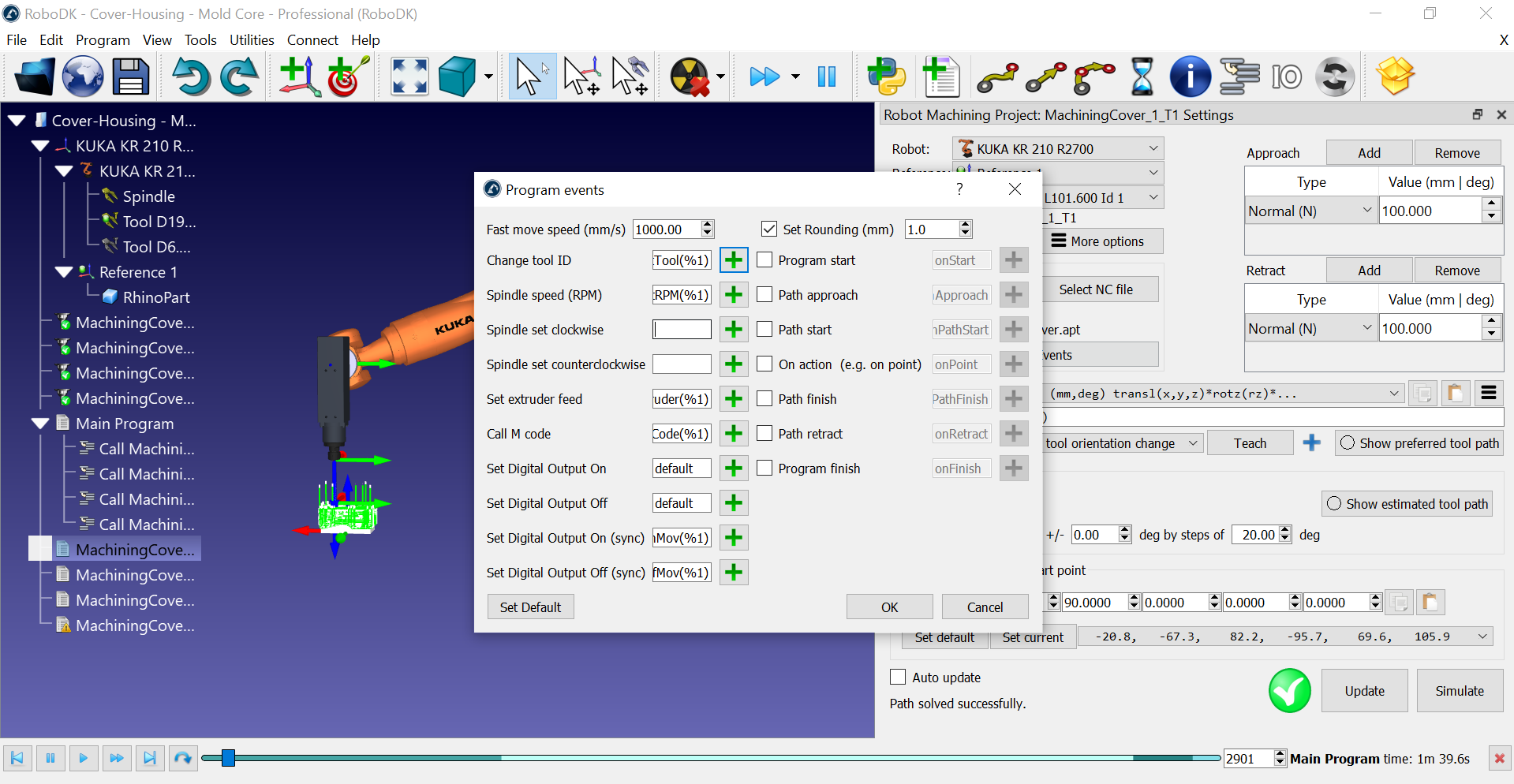
Você pode ver chamadas de programa personalizadas para selecionar a ferramenta correta de acordo com a ID da ferramenta e ativar o fuso. Essas configurações podem ser personalizadas no menu Eventos de Programas. Você pode acionar um procedimento especial no controlador do robô quando um determinado comando de usinagem tiver de ser executado, como a troca da ferramenta, a velocidade do fuso ou a execução de códigos M.