Personalizar a orientação da ferramenta
A maioria das operações de usinagem ou fabricação envolve uma restrição de 5 eixos. Embora a posição da ferramenta (TCP) e o eixo de corte estejam definidos, você tem um grau de liberdade adicional para definir quando usa um braço robótico de 6 eixos. Esse grau de liberdade permite que você gire em torno do eixo de corte e evite automaticamente singularidades e limites de eixo.
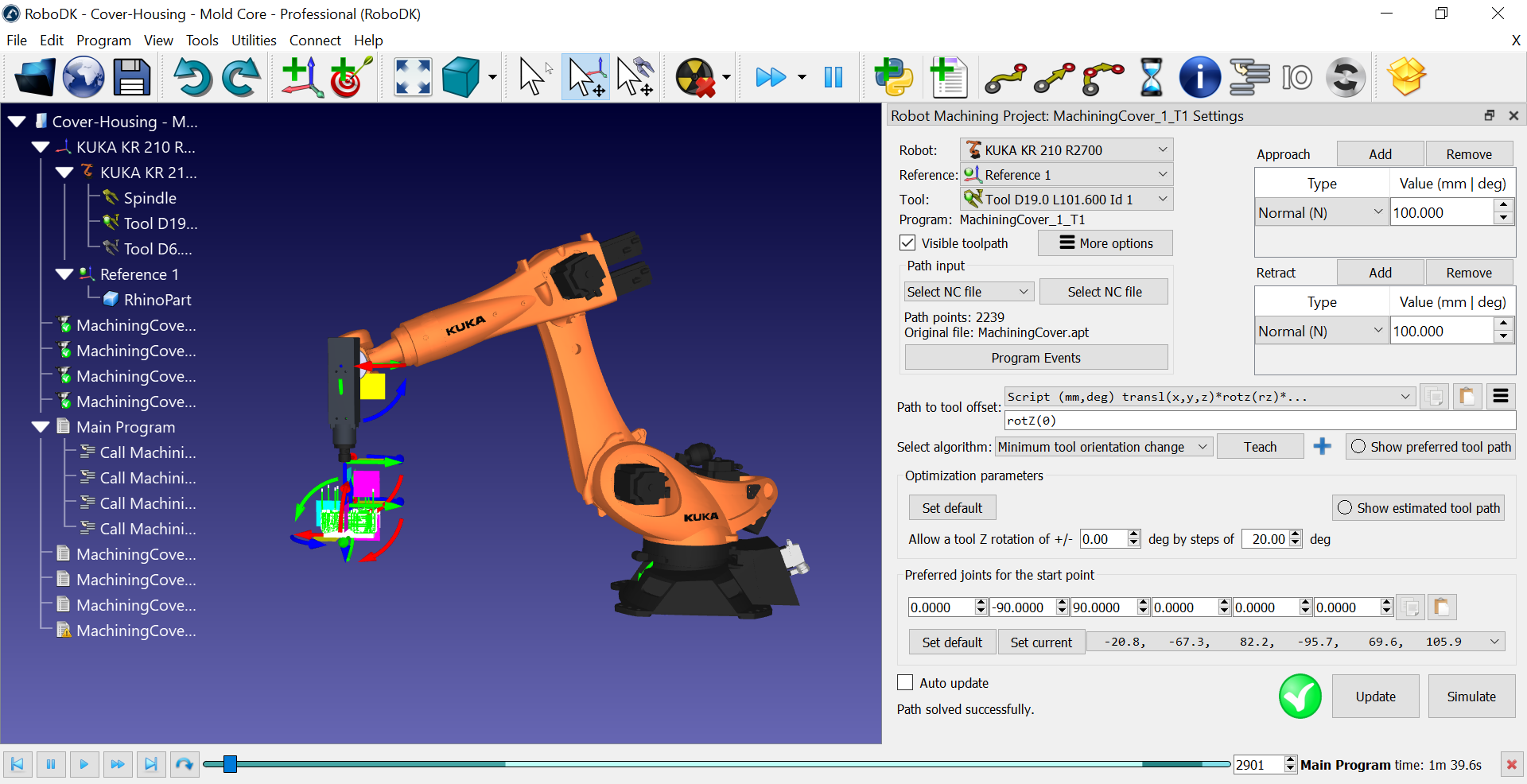
A maneira mais fácil de personalizar a orientação da ferramenta é selecionando o botão Ensinar no projeto de usinagem do robô. Ao selecionar Ensinar, você está dizendo ao RoboDK que deseja seguir a orientação atual da ferramenta para que as configurações sejam ajustadas para corresponder a essa orientação.
Ao selecionar Exibir trajetória preferida de ferramenta, podemos visualizar a orientação da ferramenta que o robô está tentando seguir.
Você pode selecionar Atualizar e Simular para ver o resultado.
Os parâmetros de otimização permitem que o robô altere automaticamente a orientação da ferramenta se o robô não conseguir atingir a orientação desejada. Esse parâmetro é importante se você tiver uma peça grande, se estiver trabalhando perto de uma singularidade ou perto dos limites do espaço de trabalho do robô. Se você vir uma marca vermelha, isso significa que o robô não pode realizar a operação.
Se você selecionar Mostrar trajetória estimadas da ferramenta, verá em verde as posições que podem ser alcançadas. Isso lhe dará uma dica de como será a orientação para tornar o caminho viável. Isso significa que estamos usando o grau de liberdade adicional para evitar automaticamente as singularidades do robô e os limites do eixo.