Programa de usinagem no RhinoCAM
Esta seção mostra como você pode exportar um trabalho de usinagem do software Mecsoft RhinoCAM para o RoboDK. Um arquivo APT é usado para carregar o caminho da ferramenta no RoboDK e enviado automaticamente usando um arquivo BAT personalizado.
Siga estas etapas no RhinoCAM para exportar o trabalho de usinagem para o RoboDK:
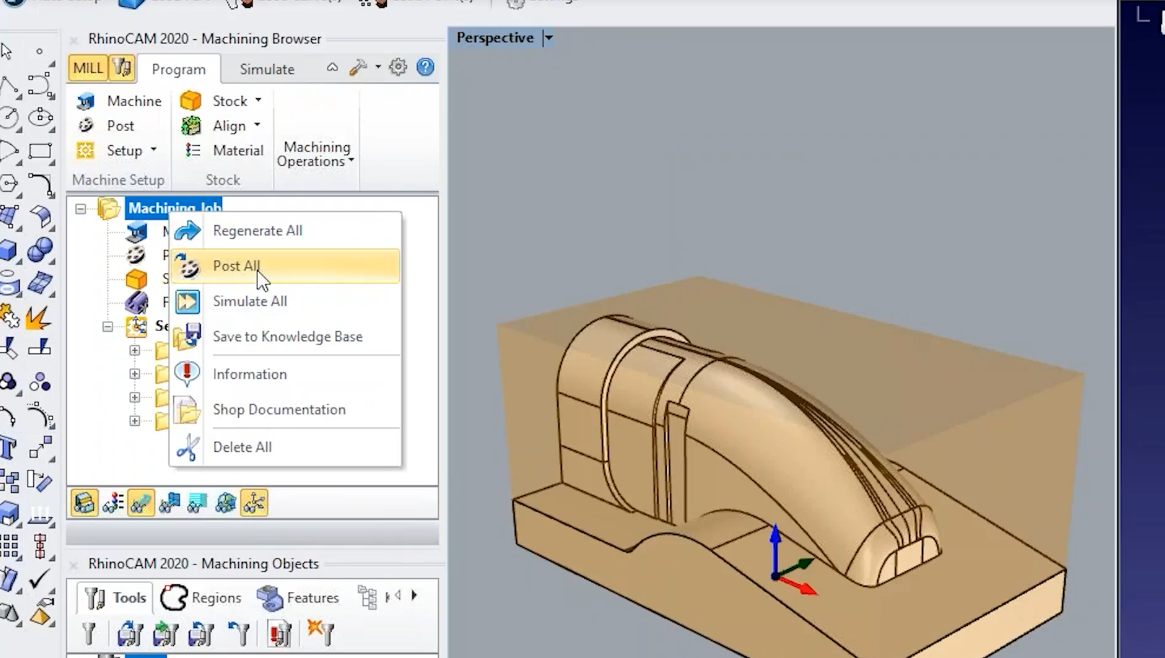
1.Clique com o botão direito do mouse no seu projeto de trabalho de usinagem do RhinoCAM.
2.Selecione Post All para gerar os programas de usinagem e carregar tudo automaticamente no RoboDK.
Você pode ver que o RoboDK divide automaticamente o programa de usinagem do robô nas mesmas 4 operações de usinagem que criamos no software CAM.
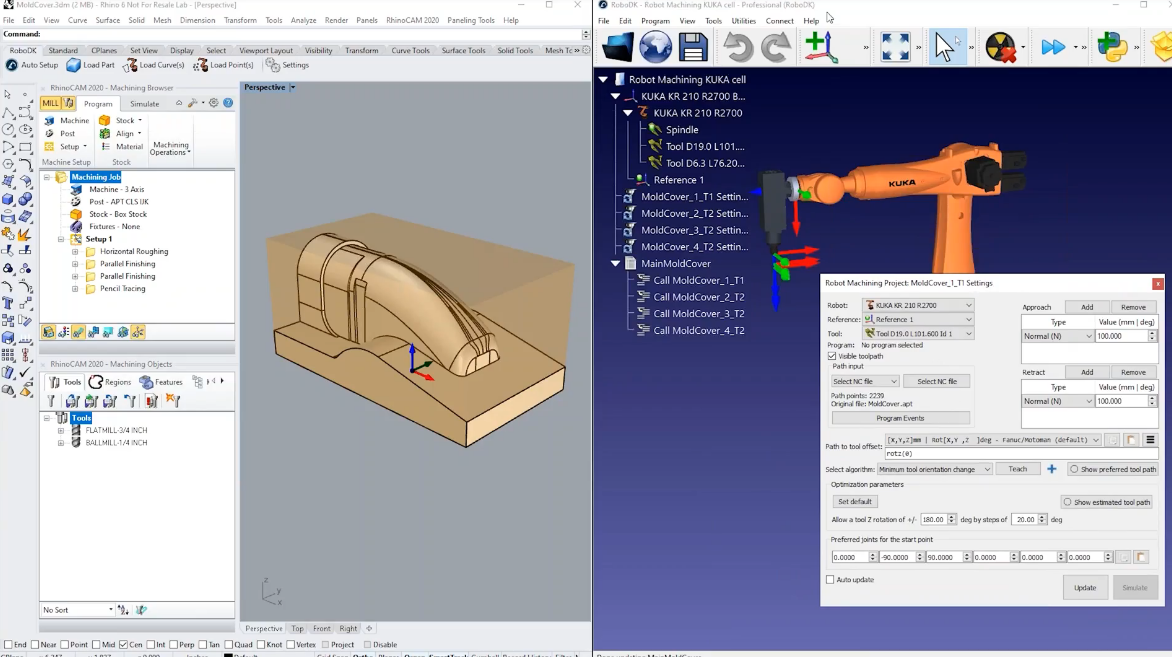
O projeto de usinagem com robôs é criado usando uma célula de robô padrão que pode ser personalizada. Neste exemplo, usamos um robô KUKA e um fuso padrão em que a ferramenta (ou TCP) representa o suporte da ferramenta.
Por padrão, ao carregar programas APT, o RoboDK adicionará as ferramentas que você definir em seu projeto de usinagem. As ferramentas serão adicionadas ao seu TCP ativo quando você carregar o arquivo APT. As ferramentas corretas também serão pré-selecionadas no projeto de usinagem do robô.