Projeto de usinagem do robô (3x)
Esta seção mostra como personalizar a configuração do robô e o caminho da ferramenta de usinagem para realizar com sucesso a usinagem do robô. O projeto de usinagem do RoboDK permite que você converta qualquer operação genérica de fabricação de 3 ou 5 eixos em uma simulação de robô e em um programa de robô.
Como carregamos o arquivo de usinagem diretamente, tudo foi criado e selecionado automaticamente. Também podemos personalizar os movimentos de aproximação e retração no RoboDK.
Criar caminho de usinagem do robô
Você pode criar a simulação de usinagem do robô no RoboDK depois de carregar o arquivo APT, selecionando Update. Isso permite que você veja se o robô pode realizar a operação de fabricação.
Este exemplo é uma operação simples de usinagem de 3 eixos, e as configurações padrão nos dão um resultado válido. O projeto de usinagem do robô permite que você controle como o robô se comporta ao longo do caminho da ferramenta de usinagem.
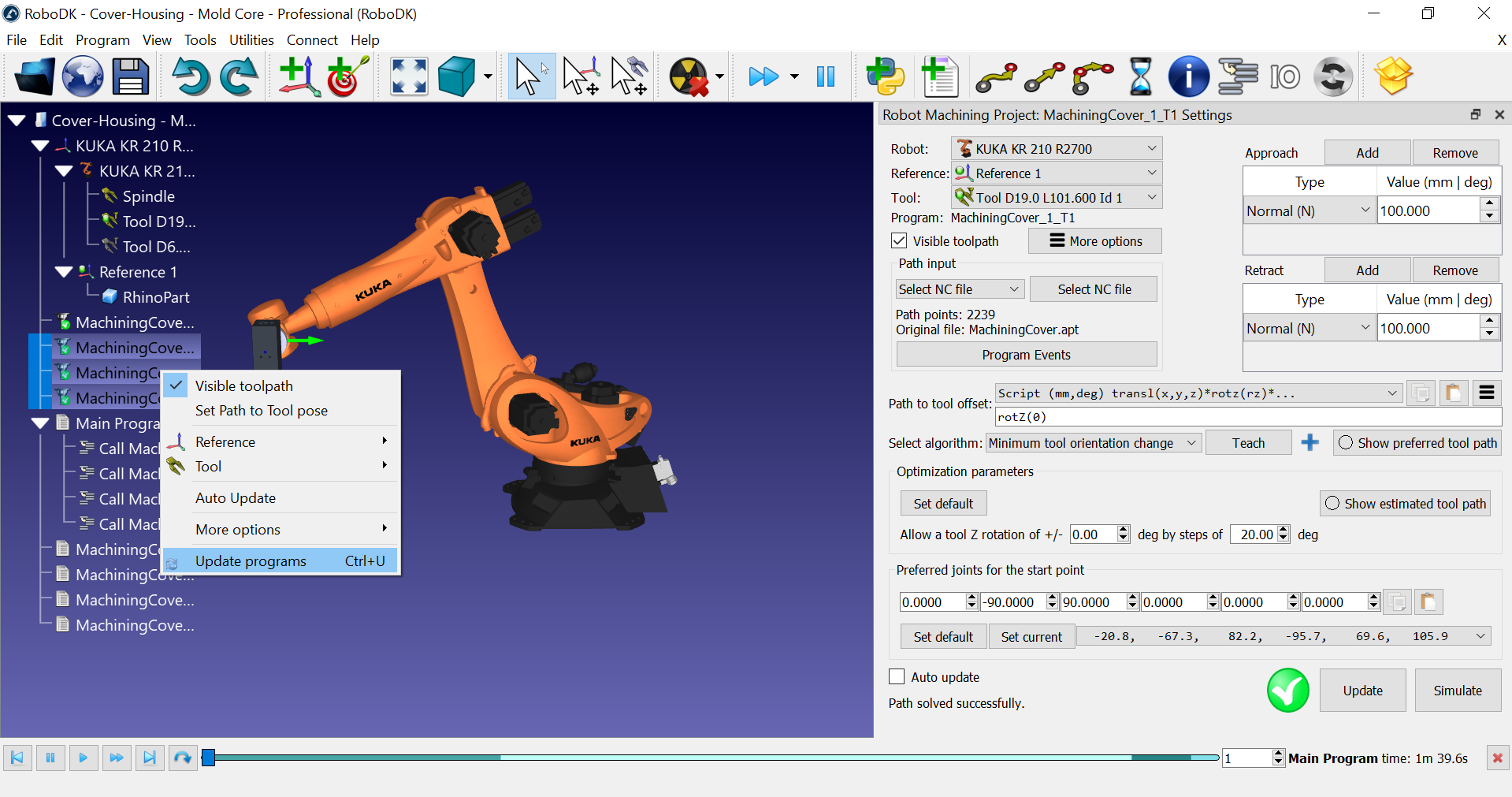
Você pode seguir estas etapas para atualizar as demais operações de usinagem do robô:
1.Selecione uma ou mais operações de usinagem do robô (manter a tecla Shift pressionada permite que você gere vários itens na árvore).
2.Clique com o botão direito do mouse no(s) item(ns) selecionado(s).
3.Selecione Atualizar programas.
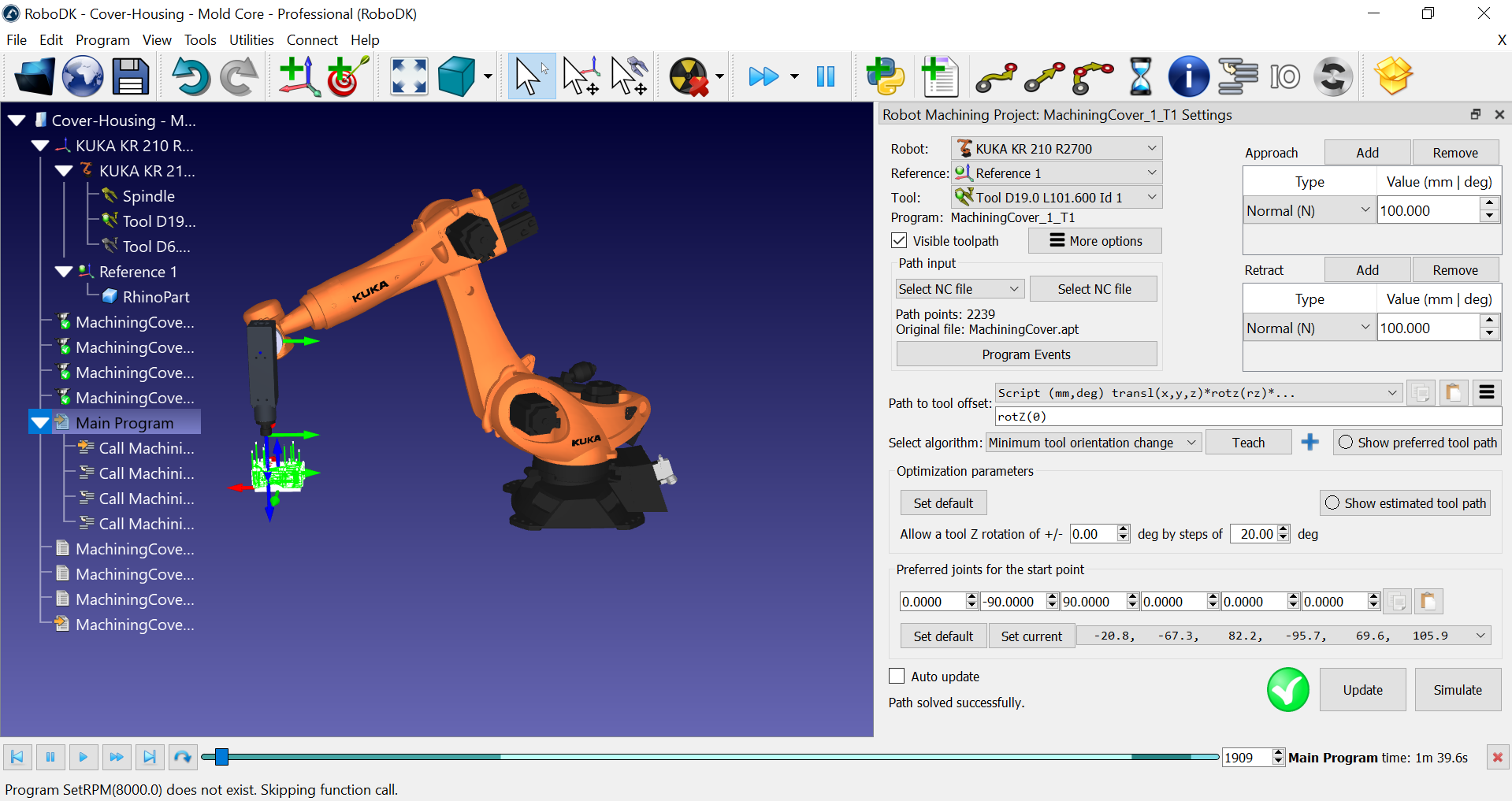
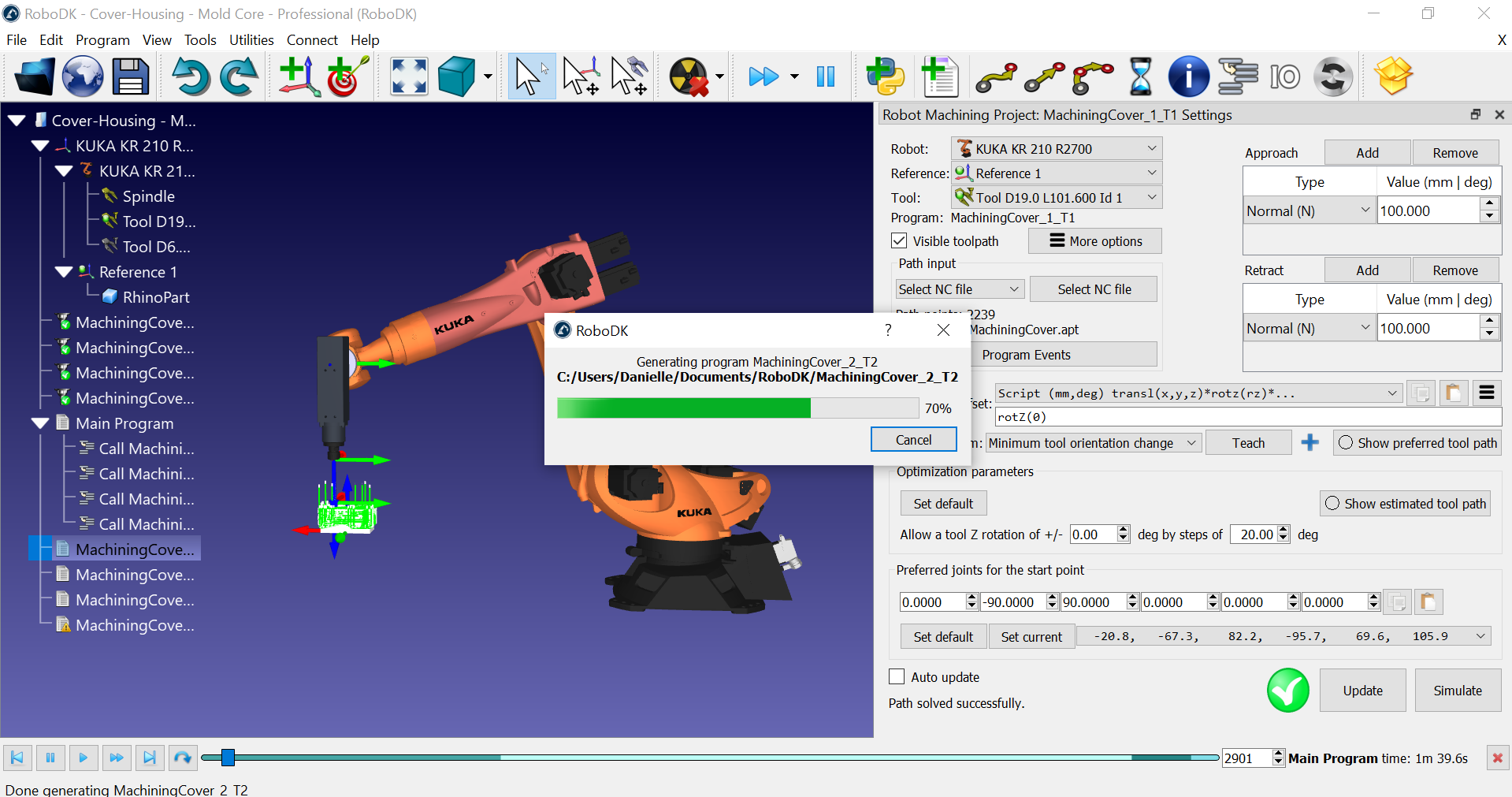
À medida que o RoboDK calcula o caminho de usinagem do robô, ele criará um novo programa de robô para cada operação de usinagem. Os ícones brancos representam os programas do robô. Esses programas são criados automaticamente pelo RoboDK. Você pode simular cada programa individualmente clicando duas vezes sobre ele na árvore.
O RoboDK também cria automaticamente um programa principal que você pode executar para simular todas as operações de usinagem do robô em ordem.
Simular a operação de usinagem do robô
Você pode clicar duas vezes no Main Program para simular toda a operação de usinagem do robô. Você também pode clicar duas vezes em qualquer subprograma para simulá-lo.
Personalizar a orientação da ferramenta
A maioria das operações de usinagem ou fabricação envolve uma restrição de 5 eixos. Embora a posição da ferramenta (TCP) e o eixo de corte estejam definidos, você tem um grau de liberdade adicional para definir quando usa um braço robótico de 6 eixos. Esse grau de liberdade permite que você gire em torno do eixo de corte e evite automaticamente singularidades e limites de eixo.
A maneira mais fácil de personalizar a orientação da ferramenta é selecionando o botão Ensinar no projeto de usinagem do robô. Ao selecionar Ensinar, você está dizendo ao RoboDK que deseja seguir a orientação atual da ferramenta para que as configurações sejam ajustadas para corresponder a essa orientação.
Ao selecionar Exibir trajetória preferida de ferramenta, podemos visualizar a orientação da ferramenta que o robô está tentando seguir.
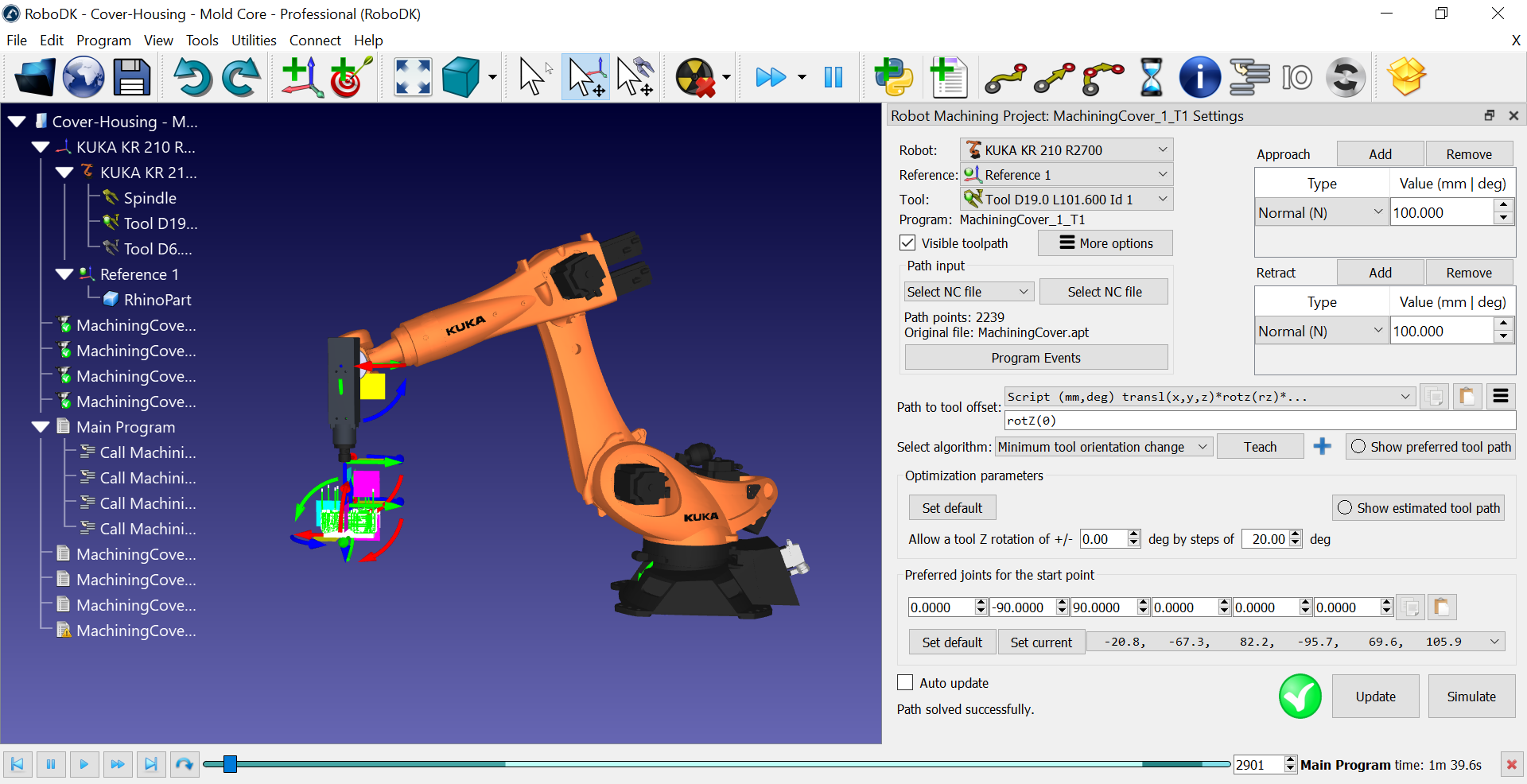
Você pode selecionar Atualizar e Simular para ver o resultado.
Os parâmetros de otimização permitem que o robô altere automaticamente a orientação da ferramenta se o robô não conseguir atingir a orientação desejada. Esse parâmetro é importante se você tiver uma peça grande, se estiver trabalhando perto de uma singularidade ou perto dos limites do espaço de trabalho do robô. Se você vir uma marca vermelha, isso significa que o robô não pode realizar a operação.
Se você selecionar Mostrar trajetória estimadas da ferramenta, verá em verde as posições que podem ser alcançadas. Isso lhe dará uma dica de como será a orientação para tornar o caminho viável. Isso significa que estamos usando o grau de liberdade adicional para evitar automaticamente as singularidades do robô e os limites do eixo.
Gerar os programas do robô
Você pode clicar com o botão direito do mouse em um ou mais programas e selecionar Gerar os programas do robô para gerar ou atualizar os programas (arquivos) do robô para o controlador do robô.
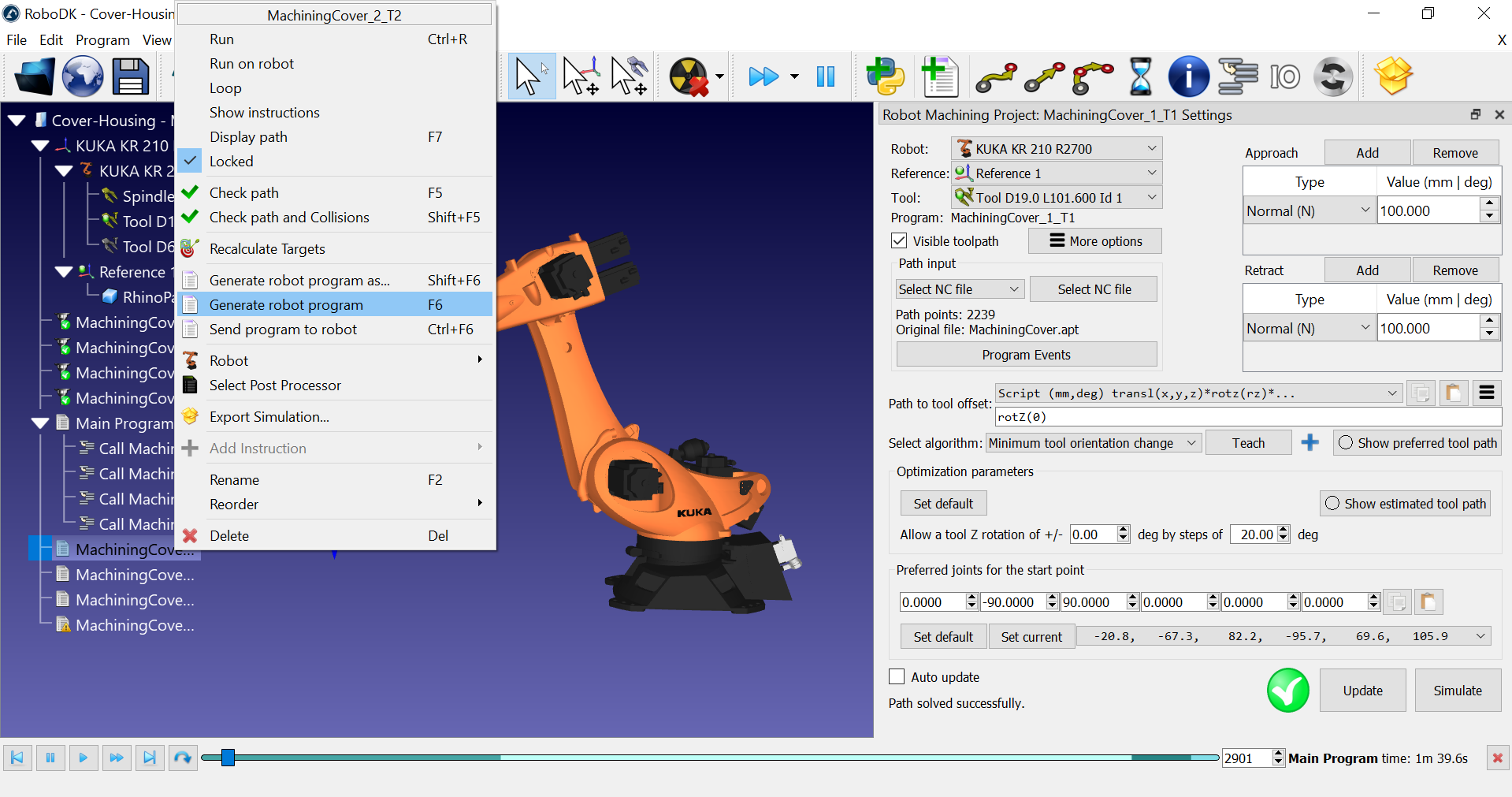
Neste exemplo, se estivermos usando um controlador de robô KUKA KRC, obteremos arquivos de programa SRC.
Você deve ver a referência e a ferramenta definidas no programa da mesma forma que as definiu no RoboDK.
Você também pode usar referência numerada e nomes de ferramentas para usar os valores armazenados no controlador com a respectiva ID.
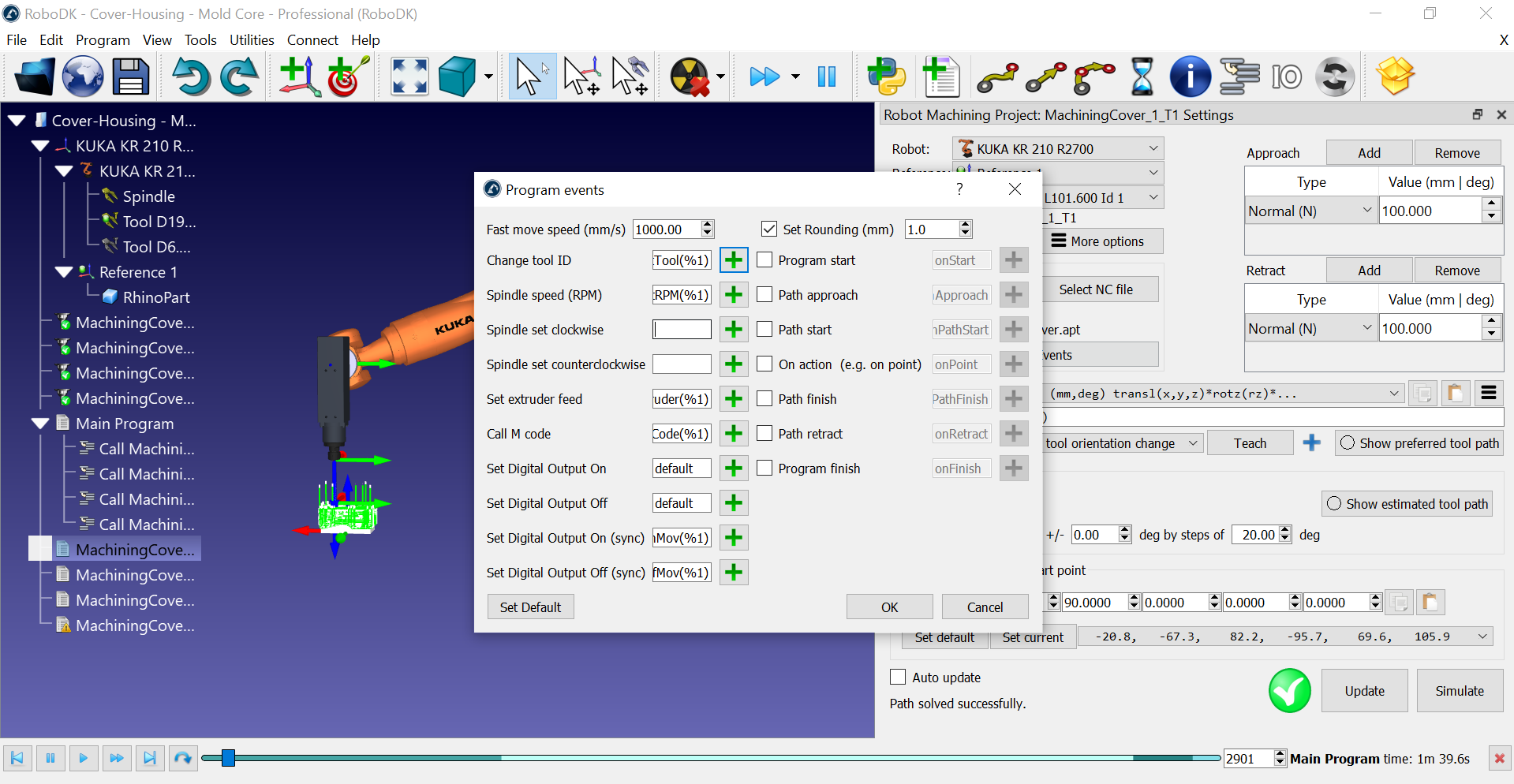
Você pode ver chamadas de programa personalizadas para selecionar a ferramenta correta de acordo com a ID da ferramenta e ativar o fuso. Essas configurações podem ser personalizadas no menu Eventos de Programas. Você pode acionar um procedimento especial no controlador do robô quando um determinado comando de usinagem tiver de ser executado, como a troca da ferramenta, a velocidade do fuso ou a execução de códigos M.
Alterar o pós-processador
Cada robô tem um pós-processador padrão associado a ele que deve gerar um código válido para o controlador do robô. Você pode alterar facilmente a saída do programa, dependendo do controlador do robô que estiver usando.
Siga estas etapas para alterar o pós-processador:
1.Clique com o botão direito do mouse em um programa ou robô.
2.Selecione Selecionar pós-processador para alterar o pós-processador.
Essa configuração será aplicada a todos os programas que usam o mesmo robô.
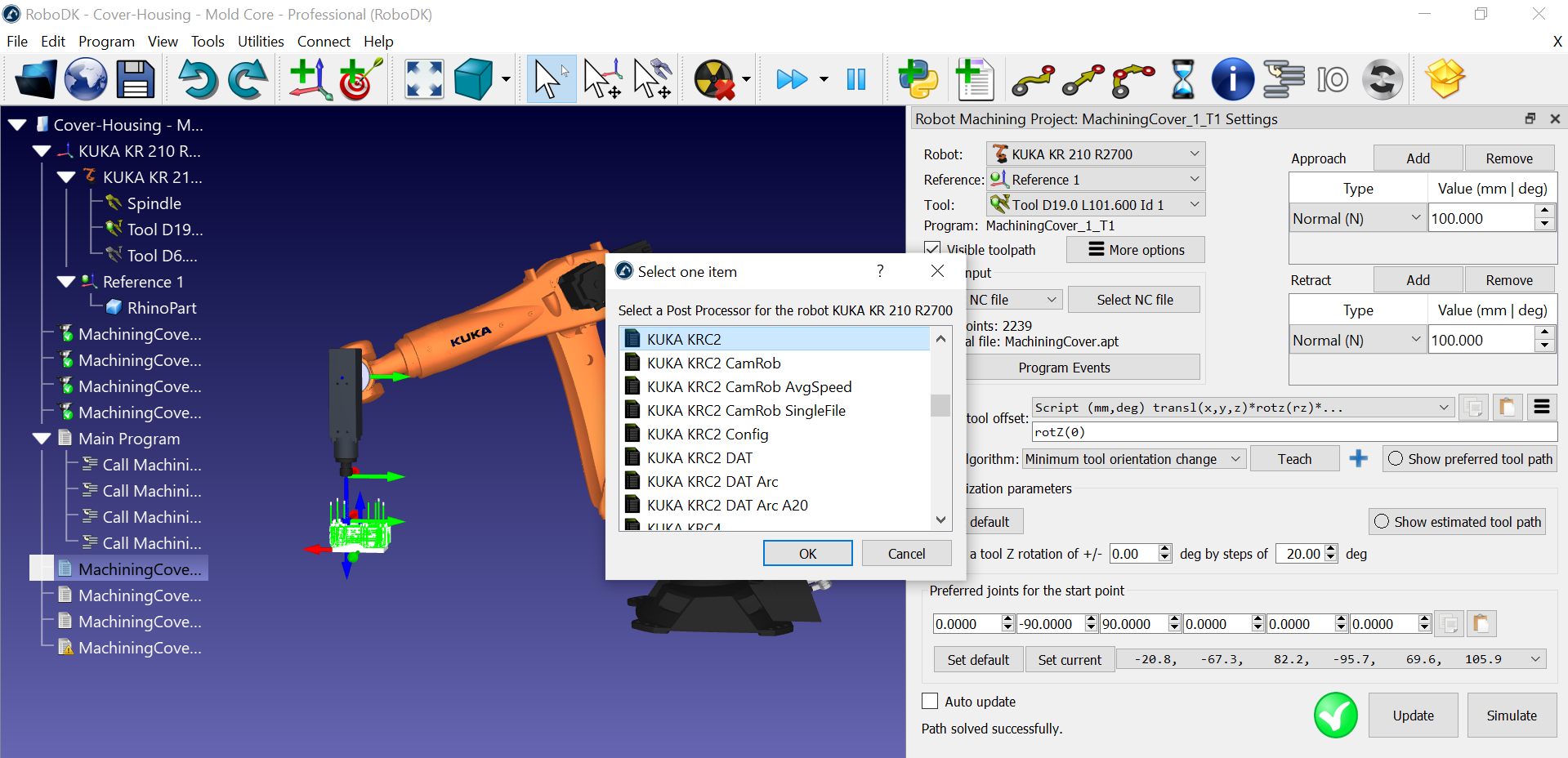
Se você tiver um robô KUKA, deverá ver o pós-processador KUKA KRC2 selecionado por padrão. Isso também deve ser compatível com os controladores KUKA KRC4. Se preferir, você ainda pode selecionar o pós-processador KUKA KRC4 se tiver um controlador KRC4.