Corte do robô no RoboDK
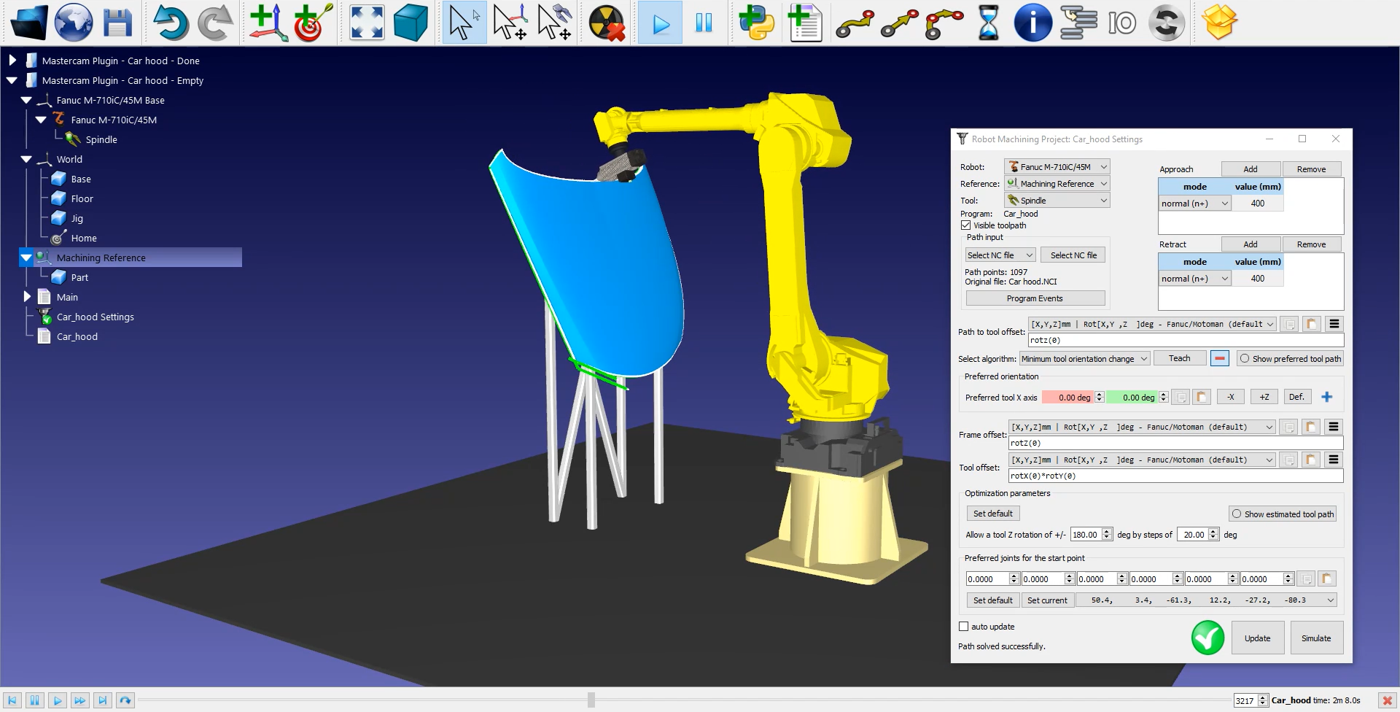
Depois que a trajetória de corte do robô tiver sido importada para o RoboDK, você deverá ver o caminho da ferramenta de corte anexado à referência do molde da estação do RoboDK. No 
Você também pode ajustar o valor dos movimentos de aproximação e retração antes e depois do caminho de corte. Uma aproximação/retração de 400 mm deve ser segura neste exemplo. Esses movimentos são agora 4 vezes mais longos do que a aproximação/retração padrão e ajudarão a evitar qualquer colisão com a peça.
Você também pode ajustar a orientação da peça na seção inferior do menu.
A próxima etapa é verificar se a ordem em que as seções do caminho serão executadas está correta, selecionando

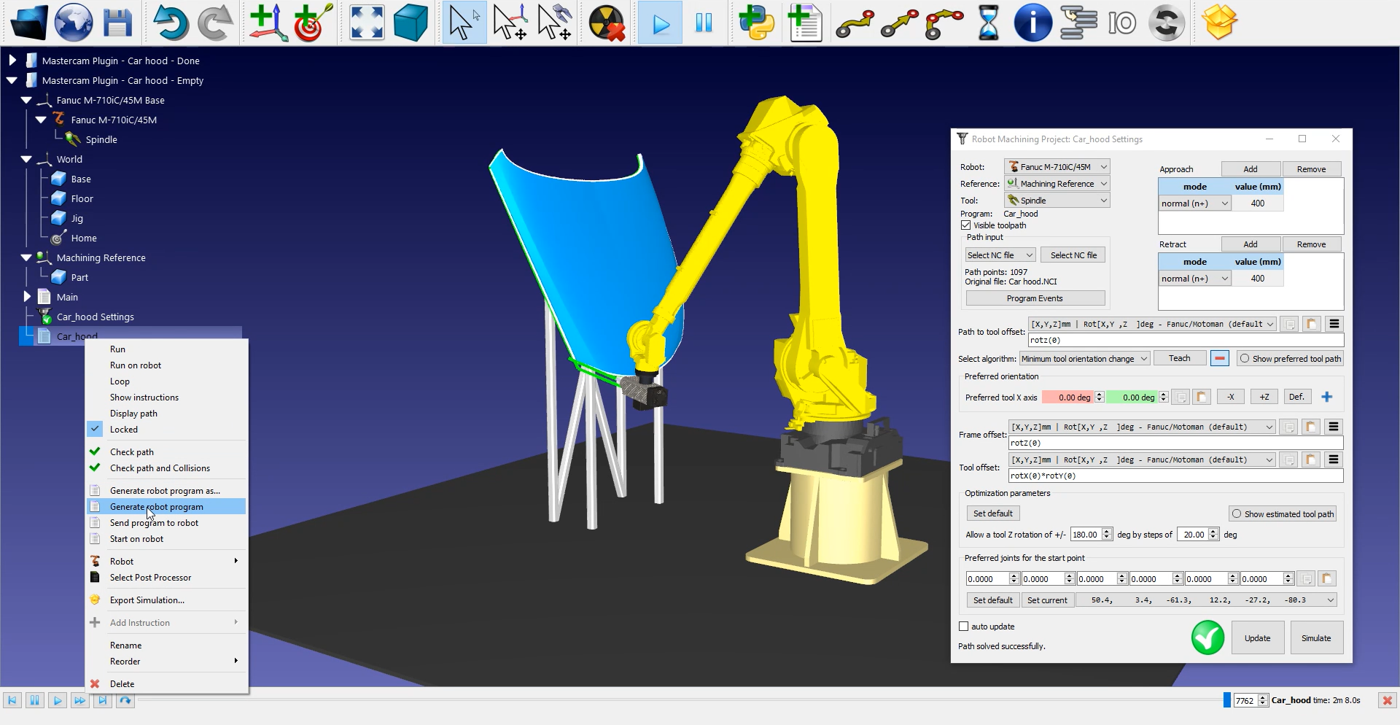
Para gerar o programa do robô, certifique-se de usar o pós-processador correto. Clique duas vezes no robô
Por fim, clique com o botão direito do mouse em
Os arquivos Fanuc LS e/ou TP agora estão prontos para serem transferidos para o controlador do robô.