Criar o sistema de coordenadas de usinagem do robô
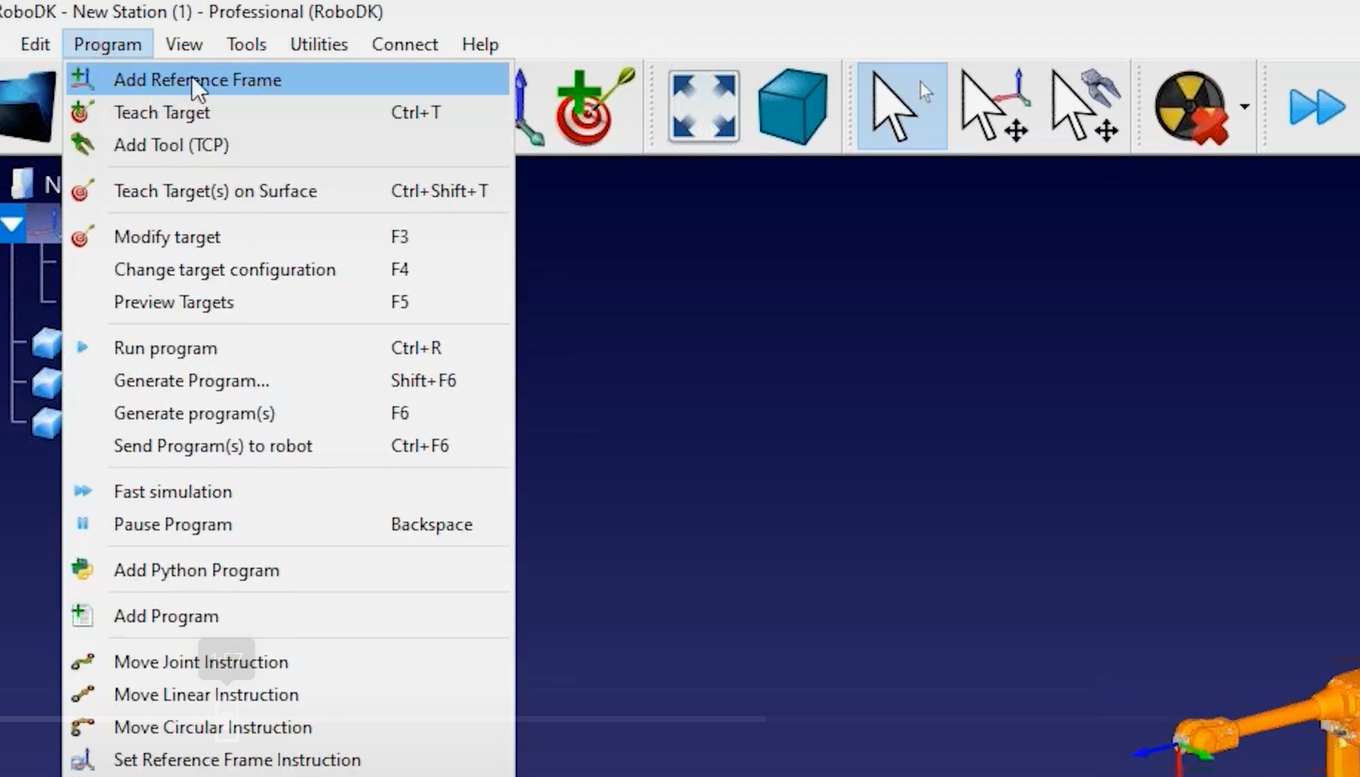
O senhor pode criar um novo sistema de coordenadas para o dispositivo de usinagem do robô selecionando o menu Program e, em seguida, Add Reference Frame.
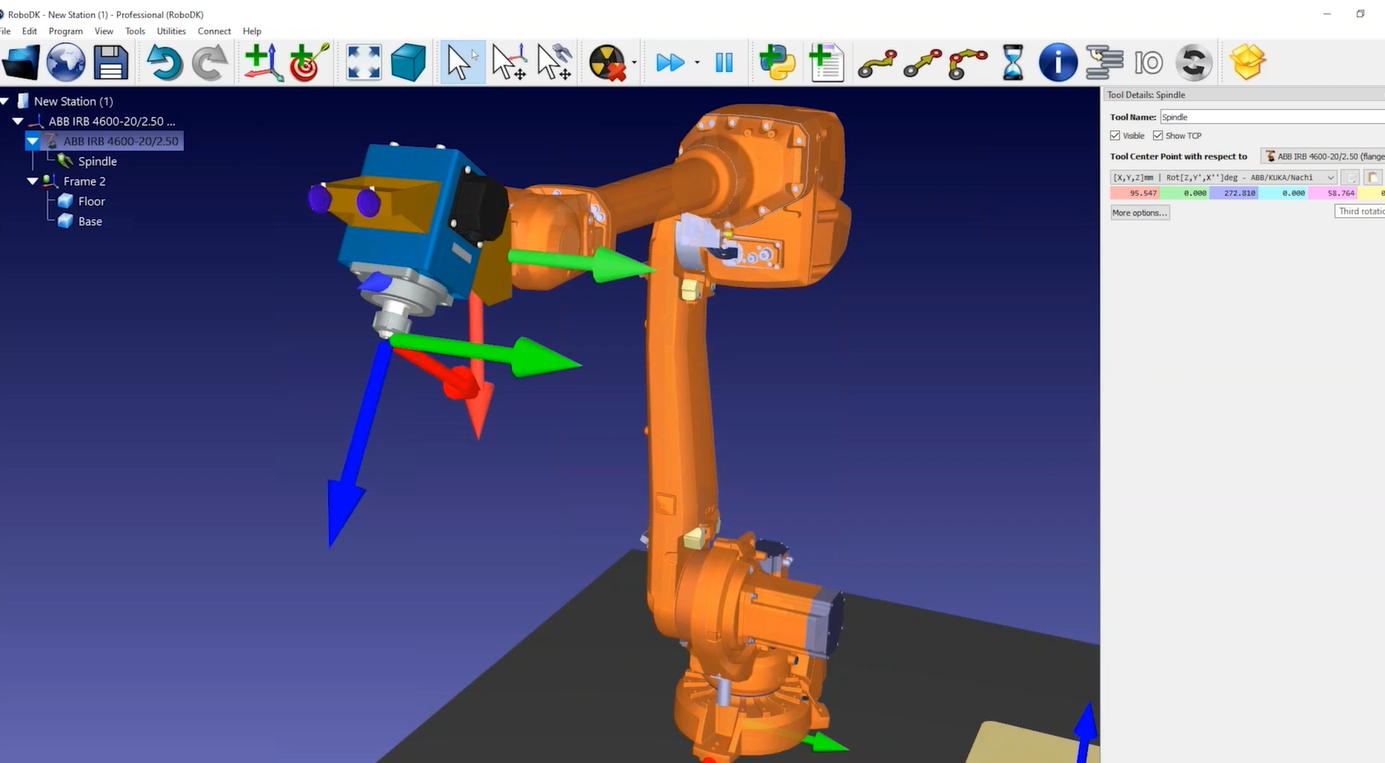
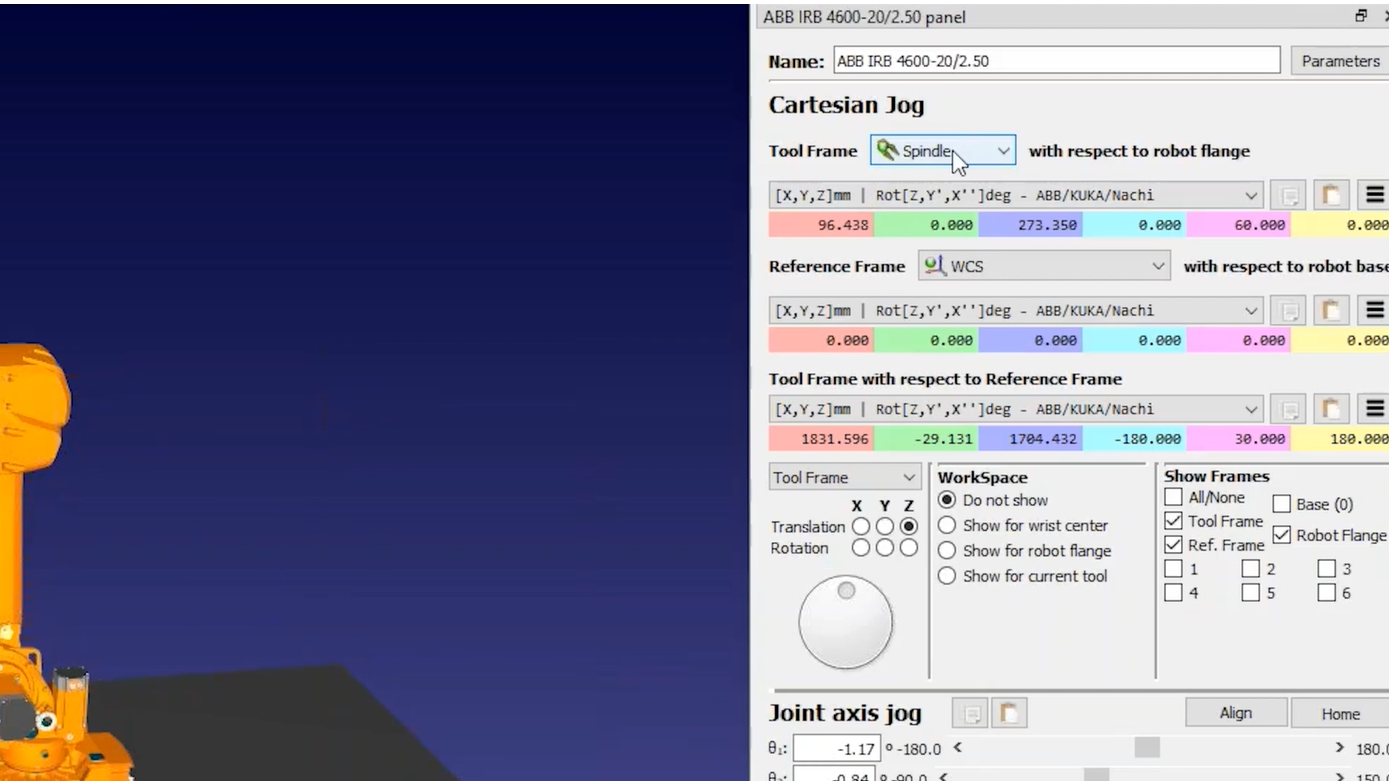
Siga estas etapas para definir corretamente a ferramenta (TCP):
1.O senhor pode inserir as coordenadas da ferramenta, se as tiver (é possível escolher entre diferentes formatos de orientação específicos do fornecedor para inserir a pose da ferramenta).
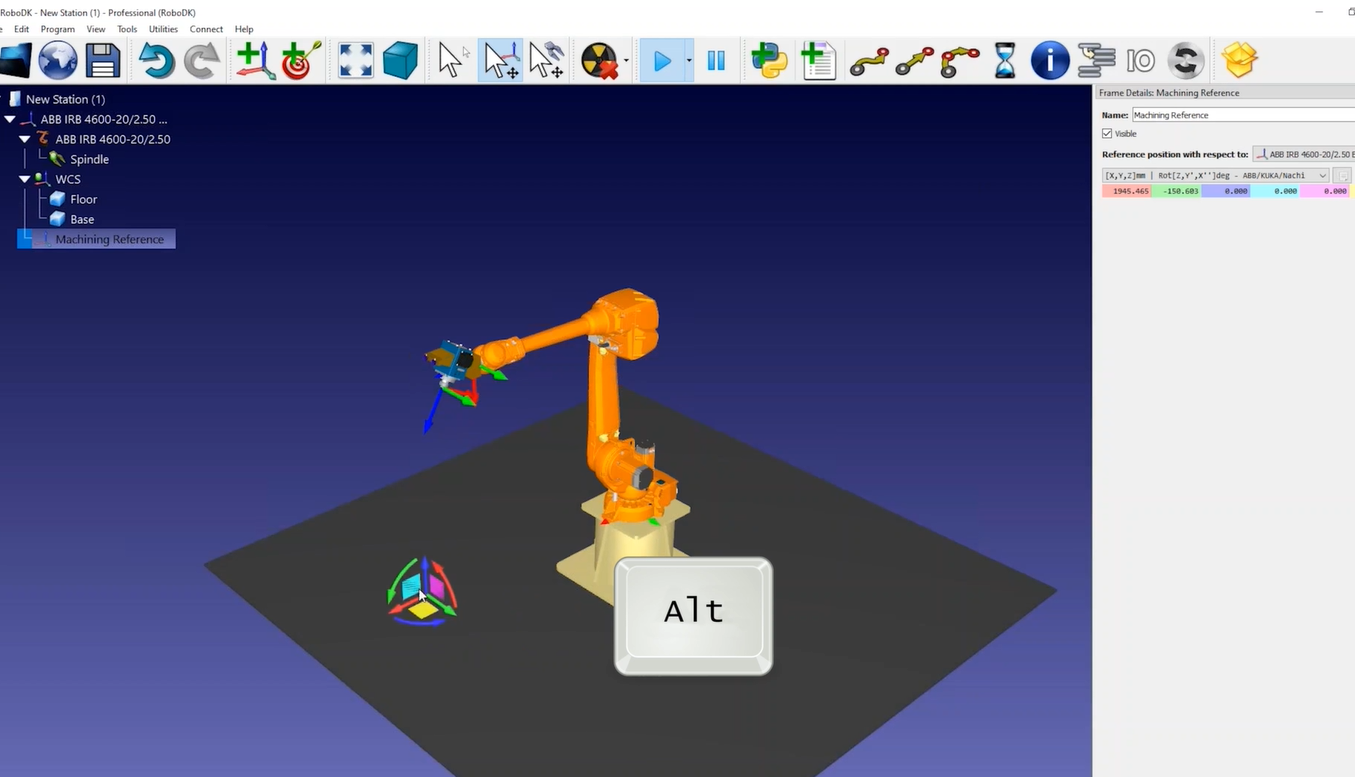
2.Mantendo pressionada a tecla ALT, o senhor pode mover o robô ou qualquer sistema de coordenadas.
3.Mantendo pressionadas as teclas ALT e Shift, o senhor pode modificar a posição e a orientação do seu TCP.
Siga estas etapas para adicionar outro sistema de coordenadas que represente a referência de usinagem:
4.Selecione o menu Program e, em seguida, Add Reference Frame.
5.O senhor pode renomear itens na árvore pressionando F2 ou clicando com o botão direito do mouse e selecionando Renomear.
6.Mantendo pressionada a tecla ALT, o senhor pode mover o sistema de coordenadas para onde quiser, se tiver a oportunidade de escolher onde colocará a peça
7.É possível clicar duas vezes no robô para ver qual ferramenta e sistema de coordenadas o senhor está usando. Para uma determinada posição do robô, os valores que o senhor vê no painel do robô devem corresponder aos mesmos valores que o senhor vê no controlador do robô.
Siga estas etapas para salvar sua célula robótica:
8.Depois de construir a célula robótica, o senhor pode salvá-la como um arquivo RDK selecionando File➔ Save Station. Isso salvará todas as configurações, inclusive os modelos 3D, em um único arquivo.
9.Carregue o arquivo de trabalho de usinagem no RoboDK e o RoboDK deverá criar automaticamente um projeto de usinagem do robô para cada operação de usinagem.
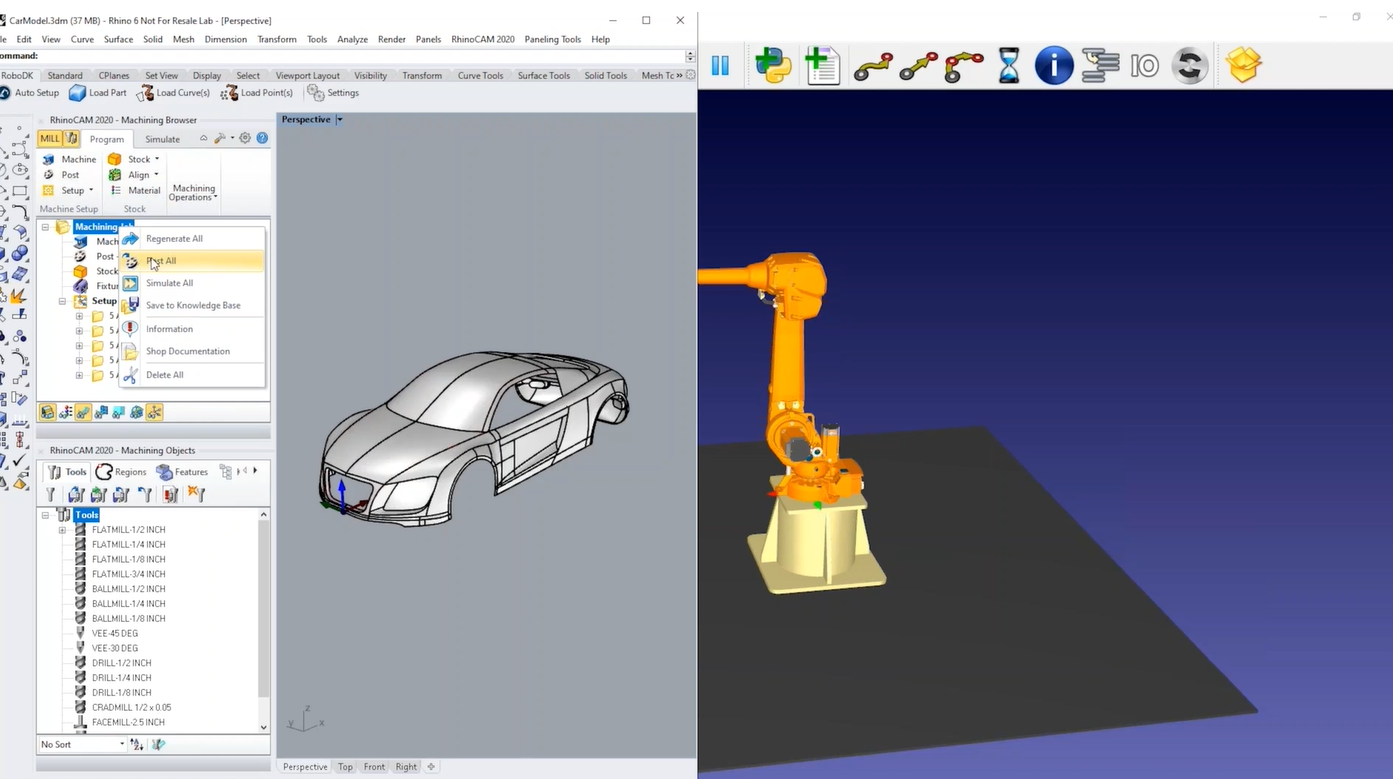
10.O senhor pode selecionar Update para ver se o RoboDK consegue encontrar um caminho viável usando as configurações padrão. O senhor também pode atualizar todas as operações em massa.
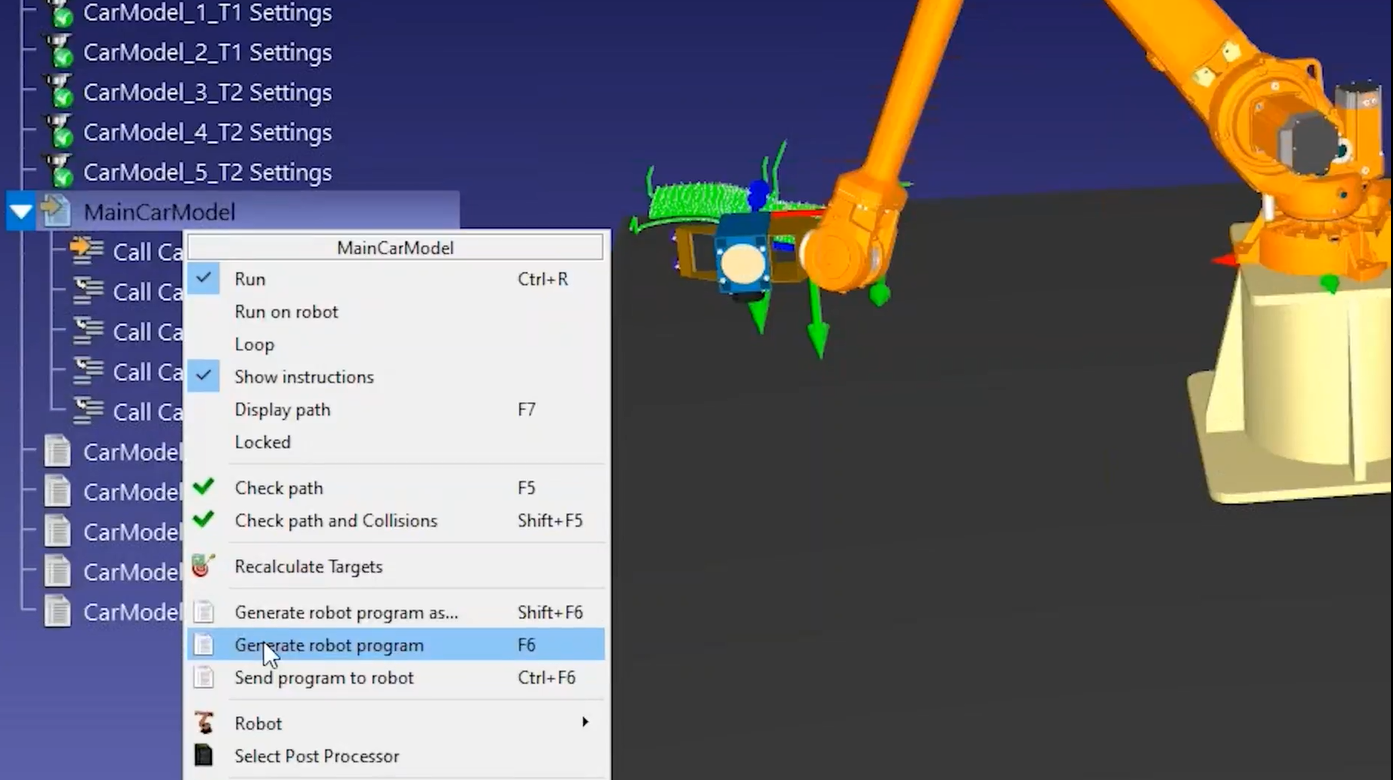
11.Quando o senhor tiver uma simulação válida no RoboDK, poderá clicar com o botão direito do mouse no seu programa e selecionar Generate Program. Isso gerará os arquivos necessários para o controlador do robô.