Personalizar a orientação da ferramenta
O senhor pode personalizar facilmente a orientação da ferramenta ao longo do programa de usinagem do robô, ensinando a orientação preferida.
Neste exemplo, poderíamos melhorar a orientação da ferramenta para as duas últimas operações de usinagem:
1.Clique duas vezes na 4ª quarta operação de usinagem para abrir as configurações de usinagem do robô para essa operação.
2.Selecione Simular ou execute o programa correspondente e pare o robô em um ponto ao longo do caminho de usinagem.
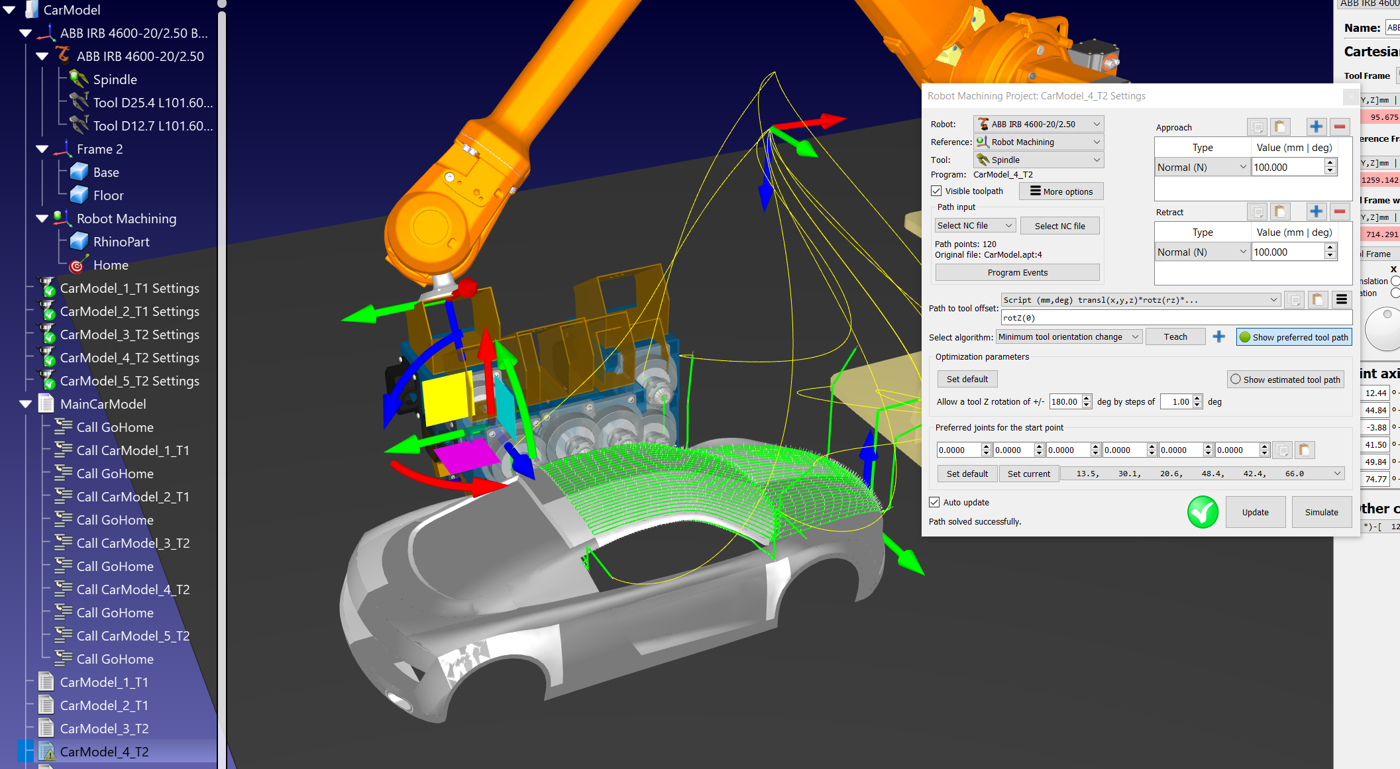
3.Selecione o botão Show preferred tool path para ver a orientação da ferramenta que o RoboDK tentará fazer com que o robô siga.
4.Mantenha a tecla Alt pressionada para pegar a ferramenta do robô e pegue a seta redonda azul para girar em torno do eixo Z da ferramenta. Mova a orientação da ferramenta para a orientação que o senhor deseja seguir.
5.Selecione Ensinar no menu de usinagem do robô para levar em conta essa orientação ao longo do caminho. Ao selecionar Teach, o senhor está dizendo ao RoboDK que deseja seguir a orientação atual da ferramenta para que as configurações sejam ajustadas para corresponder a essa orientação.
6.Selecione Update (Atualizar) para recalcular o caminho.
Selecione Simulate para executar a simulação (ou clique duas vezes no programa gerado).
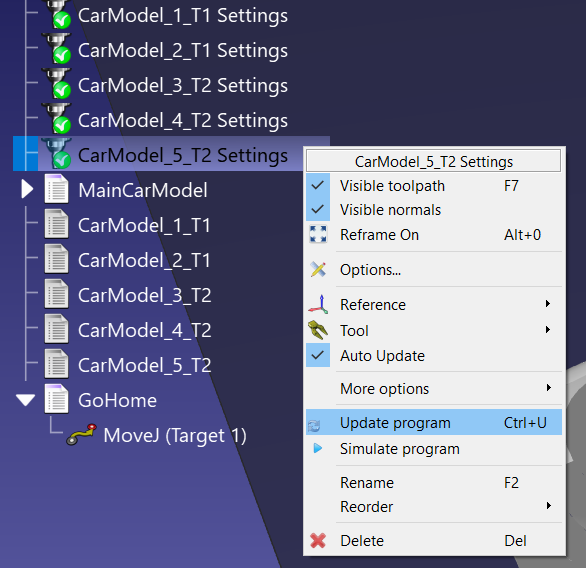
7.Se o resultado for o esperado, o senhor poderá copiar as configurações e colá-las em outro caminho de ferramenta: Clique com o botão direito do mouse nas configurações de usinagem do robô e selecione Copiar configurações. Em seguida, clique com o botão direito do mouse nas novas configurações de usinagem do robô e selecione Paste settings (Colar configurações). Clique novamente com o botão direito do mouse nesse último projeto de usinagem do robô e selecione Update program (Atualizar programa) para atualizar o programa associado a esse trabalho de usinagem do robô.