Transições seguras entre trabalhos de usinagem de robôs
Para tornar a transição entre os trabalhos de usinagem do robô mais segura, o senhor pode fazer com que o robô se mova para uma posição de aproximação após cada operação de usinagem.
Siga estas etapas para criar um novo programa chamado GoHome e vá para esse local depois que cada trabalho de usinagem for concluído:
1.Crie um novo programa selecionando Program➔ Add Program ou selecione o botão correspondente na barra de ferramentas.
2.Renomeie o programa pressionando F2 para algo como GoHome.
3.Selecione o programa que o senhor acabou de criar.
4.Mova o robô para um local seguro e selecione Program➔ Move Joint Instruction ou selecione o botão correspondente na barra de ferramentas. Essa operação deve criar um novo alvo nesse local e adicionar uma instrução de movimentação de juntas a esse alvo se o programa tiver sido selecionado anteriormente.
5.O senhor pode então fazer com que o robô se mova para esse alvo inicial entre cada operação de usinagem clicando com o botão direito do mouse na primeira instrução de chamada de programa e selecionando Add Instruction➔ Instrução de chamada de programa.
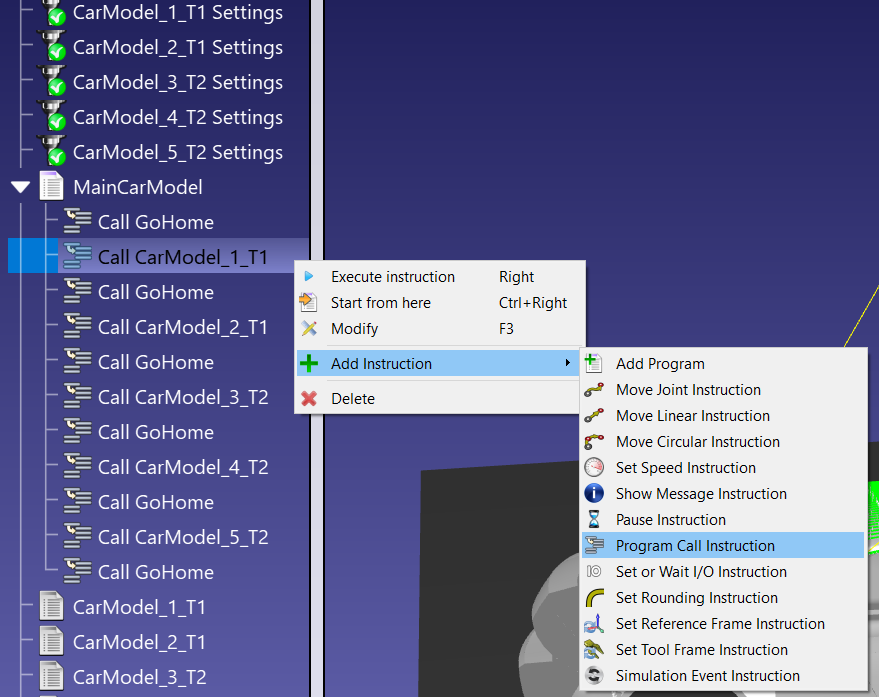
6.Digite o nome do programa para o qual deseja ir (GoHome) e selecione OK.
7.O senhor pode então copiar/colar essa instrução no seu programa para obter rapidamente o resultado final.
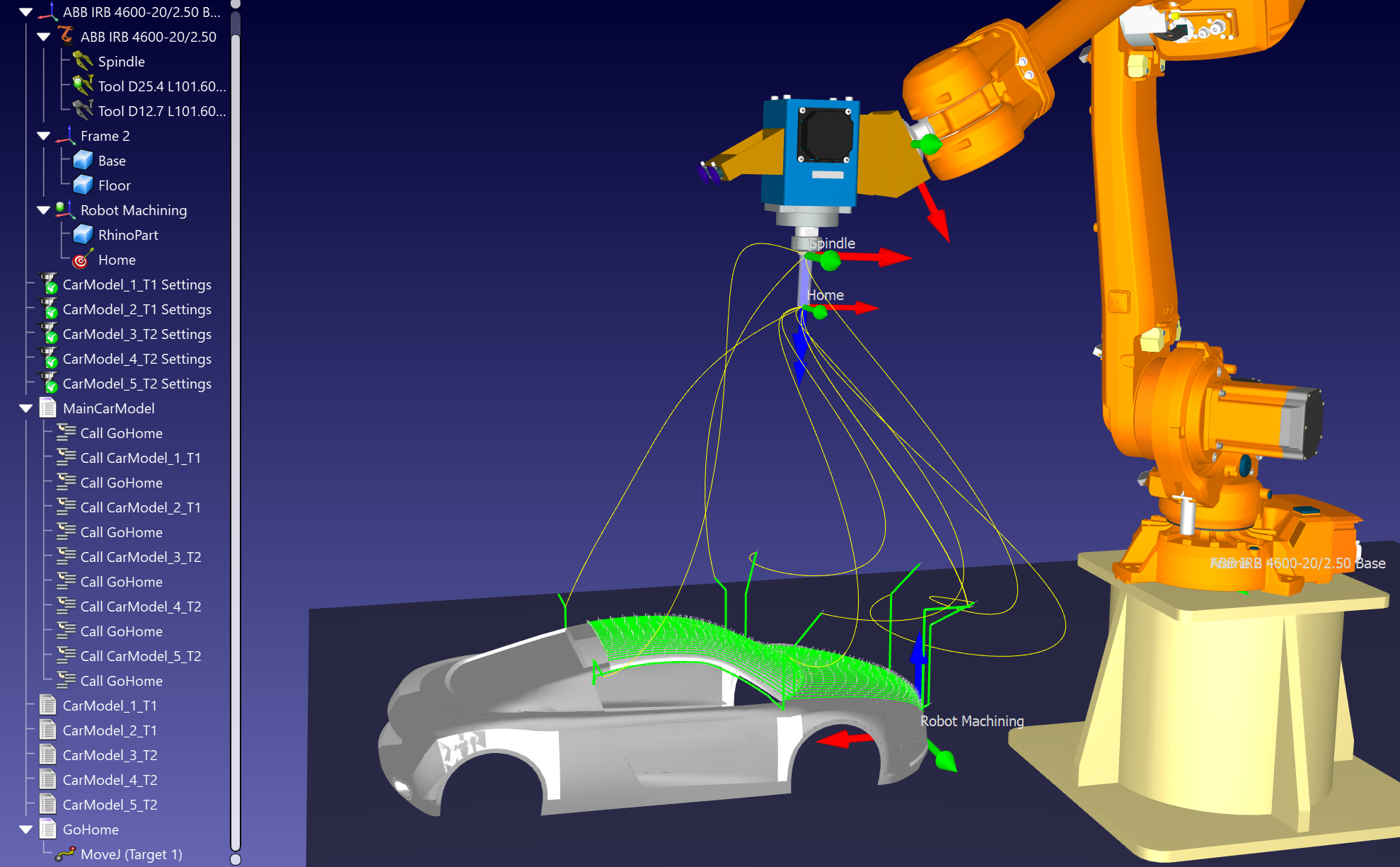
8.Clique com o botão direito do mouse no programa principal e selecione Exibir caminho para ver o caminho da ferramenta do robô como uma linha amarela. Isso o ajudará a visualizar se a posição do alvo de aproximação é adequada ao seu projeto.