Estação RoboDK
A próxima etapa é verificar se a ordem em que as seções do caminho serão executadas está correta, selecionando
Se quiser reordenar ou mudar o sentido de uma seção de caminho, siga estas etapas:
1.Corrija a ordem das seções do caminho clicando em
2.Clique com o botão direito do mouse em uma seção vazia da estação e em Redefinir seleção
3.Vá até o ponto inicial da trajetória e selecione a primeira seção. Certifique-se de que ela esteja apontando para a direção correta clicando com o botão direito do mouse sobre ela e pressione Mudar sentido, se necessário.
4.Selecione Auto selecionar próxima curva ou Auto selecionar tudo para selecionar automaticamente todas as seções do caminho na ordem correta.
5.Selecione Concluído. Isso o levará de volta à janela de configuração do RoboDK.
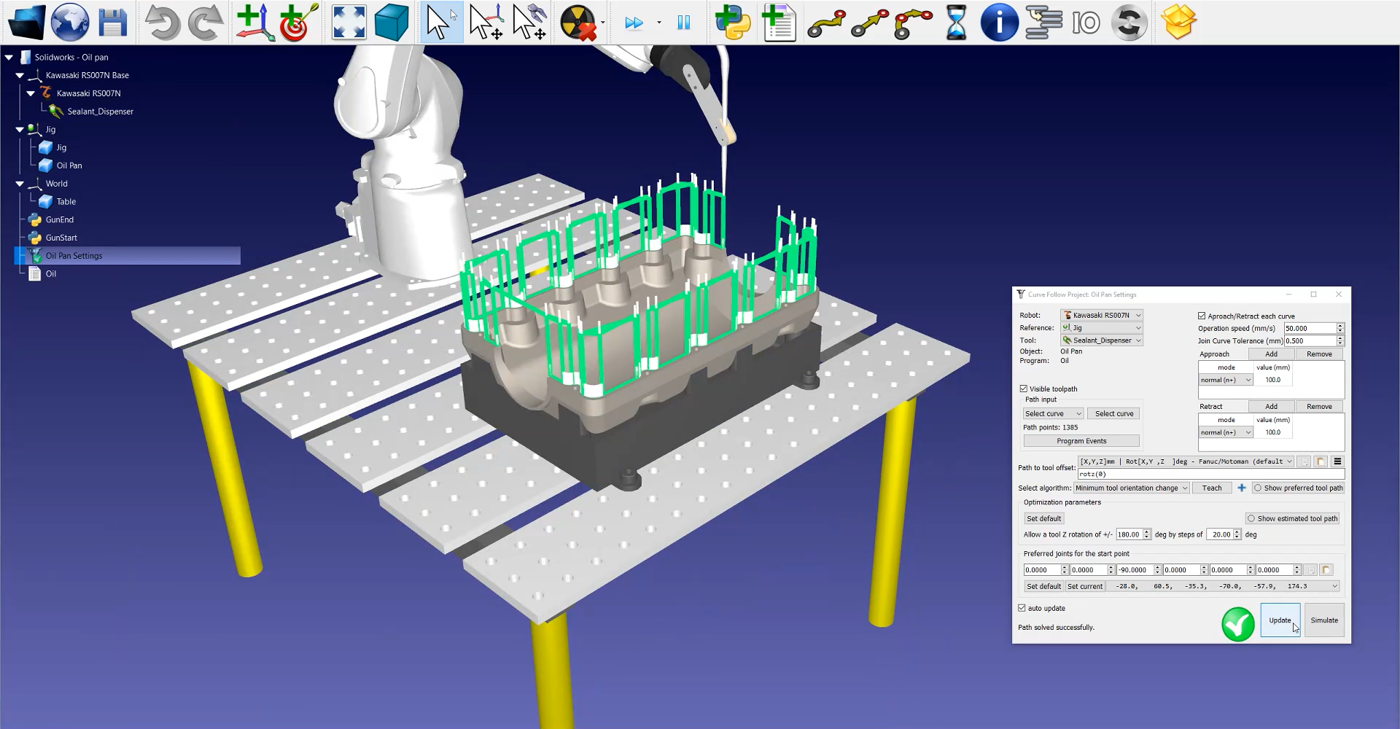
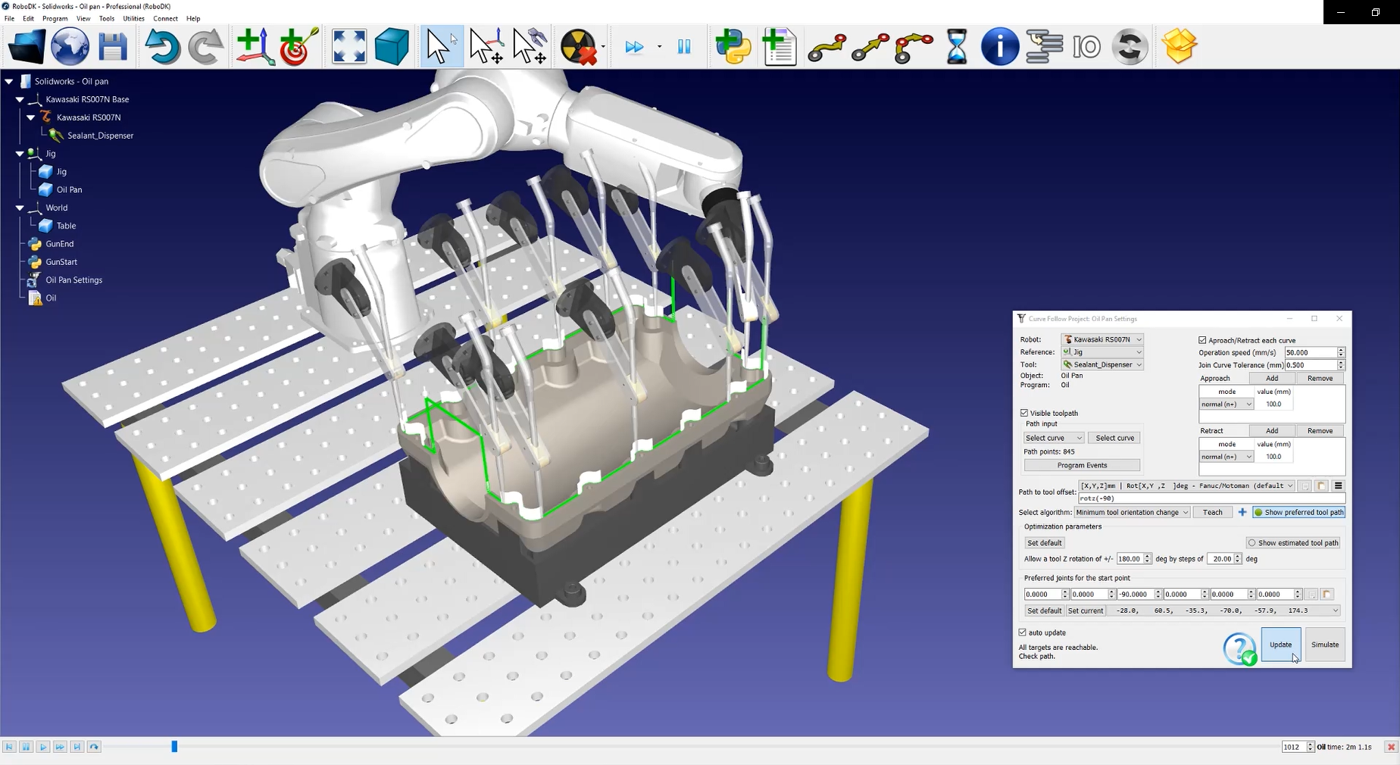
Em seguida, você terá de ajustar a orientação da ferramenta:
1.Selecione Exibir trajetória de ferramenta preferida para ajudar a visualizar a ferramenta ao longo do caminho, conforme mostrado na imagem abaixo.
2.Modifique o valor rotz. Neste exemplo, o valor de -90 graus está configurado.
3.Selecione Atualizar ➔ Simular.
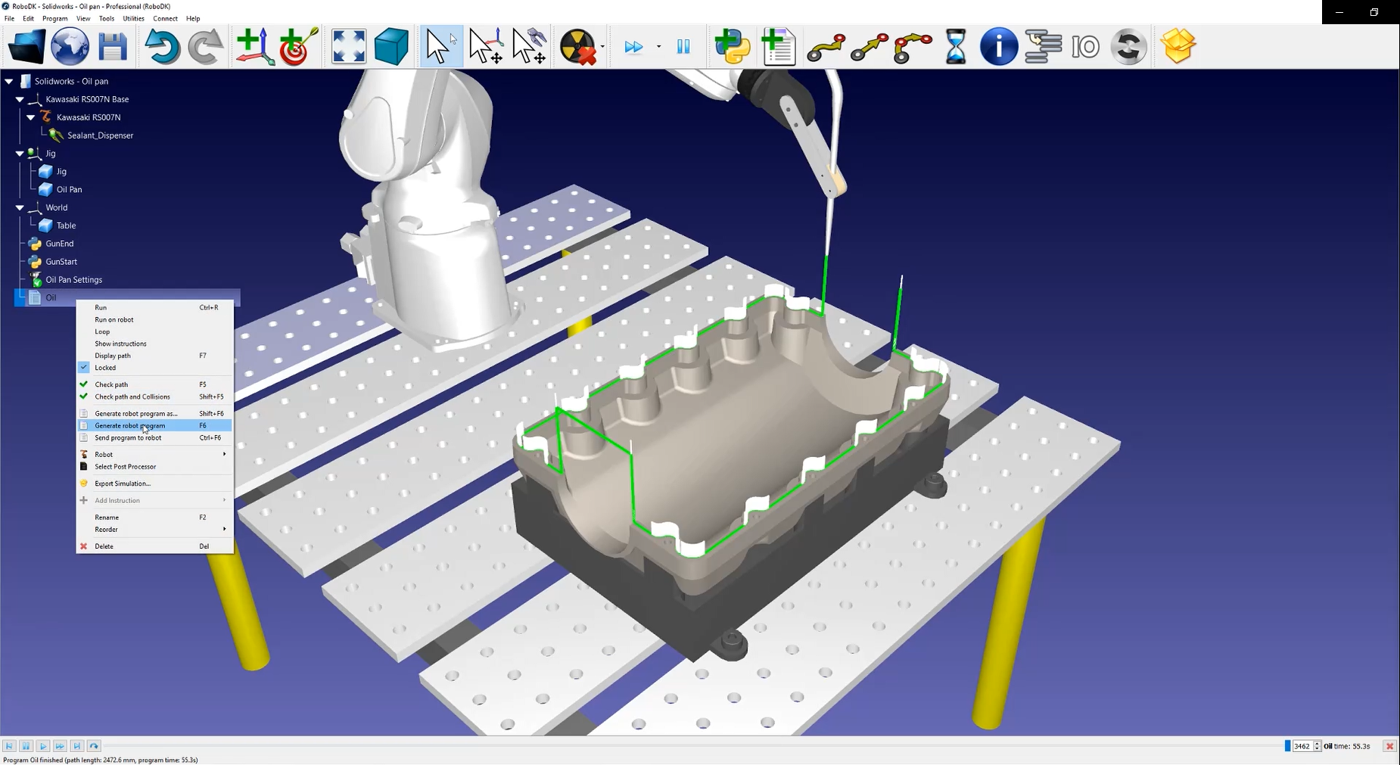
Para gerar o programa do robô, clique com o botão direito do mouse em
O arquivo .pg agora está pronto para ser transferido para o controlador do robô.