Laser Cutting
Introdução
Esta seção o ajudará a criar um projeto básico no RoboDK para simulação de robôs e programação off-line. Neste exemplo, um robô Motoman é simulado e programado para uma aplicação de corte a laser usando o Fusion 360 e o RoboDK.
Você pode escolher entre dois métodos diferentes: usando o método de extração de recursos e outro usando os recursos de corte a laser do Fusion 360.
Com o plug-in do RoboDK para o Fusion 360, você pode carregar facilmente modelos 3D criados no Fusion 360 para o RoboDK. Esse plug-in permite que você programe mais de 50 fabricantes de robôs diferentes e 500 robôs diretamente do Autodesk Fusion 360.
O plug-in do RoboDK para o Fusion 360 é gratuito se você tiver uma licença do RoboDK.
Exemplo de corte a laser
Para iniciar o projeto, primeiro você terá de selecionar o exemplo de corte a laser do RoboDK na biblioteca padrão.
Configuração
Este exemplo usa o robô Motoman MH50-35, um cabeçote de corte a laser, uma peça de metal estampada e uma mesa de corte a laser.
Carregue a estação:
1.Selecione Arquivo ➔
2.Localize o exemplo Laser-Cutting na seção de exemplos do RoboDK:
C:/RoboDK/Examples/Plugin-Fusion-360-Laser-Cutting.rdk.
Observe que o quadro de referência
Agora que você carregou a estação, pode abrir o Fusion 360.
Método 1: extração de recursos
Abra seu objeto 3D no Fusion 360. Neste exemplo, o objeto 3D é uma peça de metal estampada
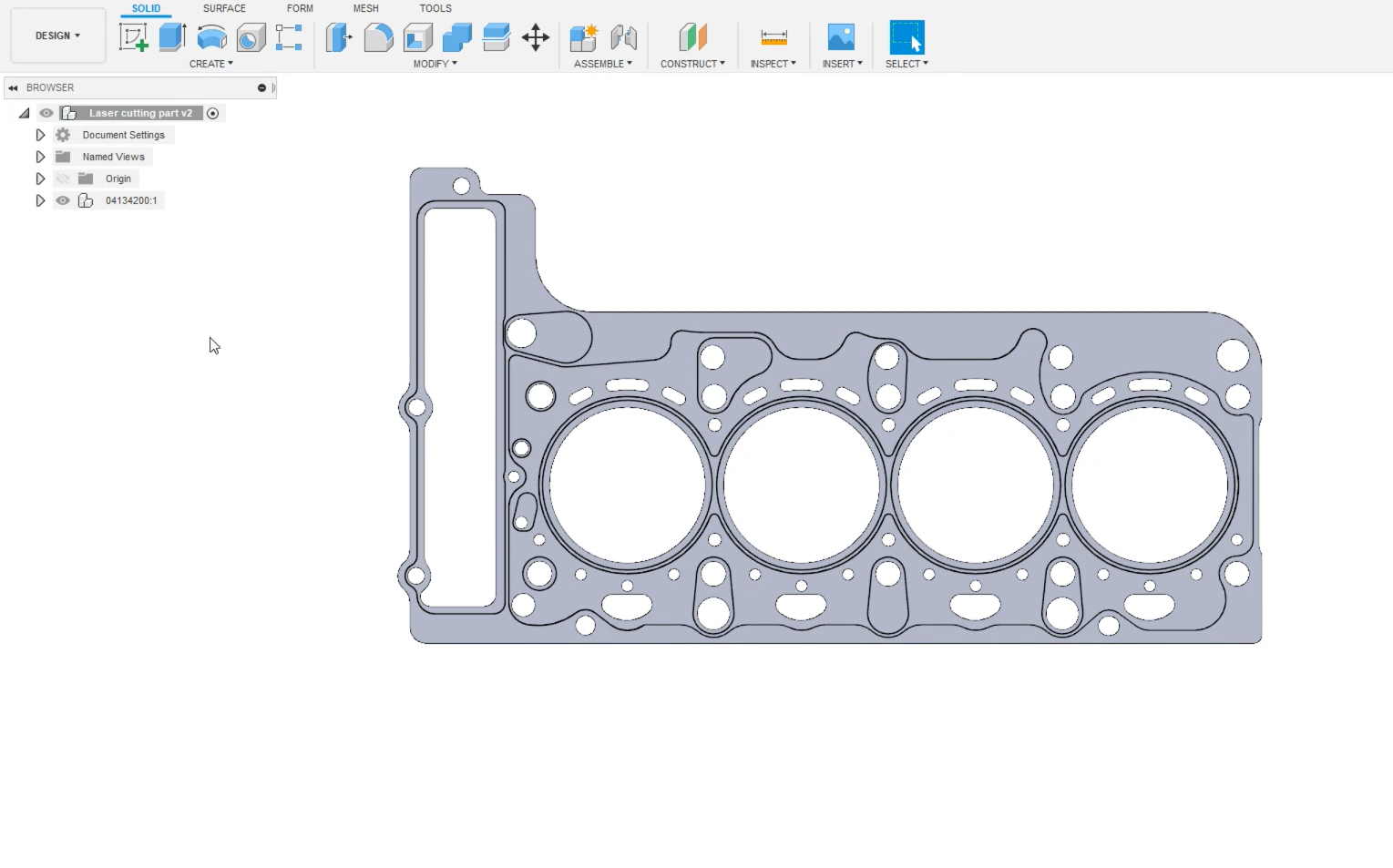
O objetivo deste projeto é criar automaticamente um programa de robô que cortará todos esses furos com um cortador a laser. Programar isso manualmente levaria muito tempo.
1.Selecione a seção Design do Fusion no canto superior esquerdo.
2.Selecione a guia Tools (Ferramentas). É aqui que você encontrará o plug-in do RoboDK.
3.Clique no botão
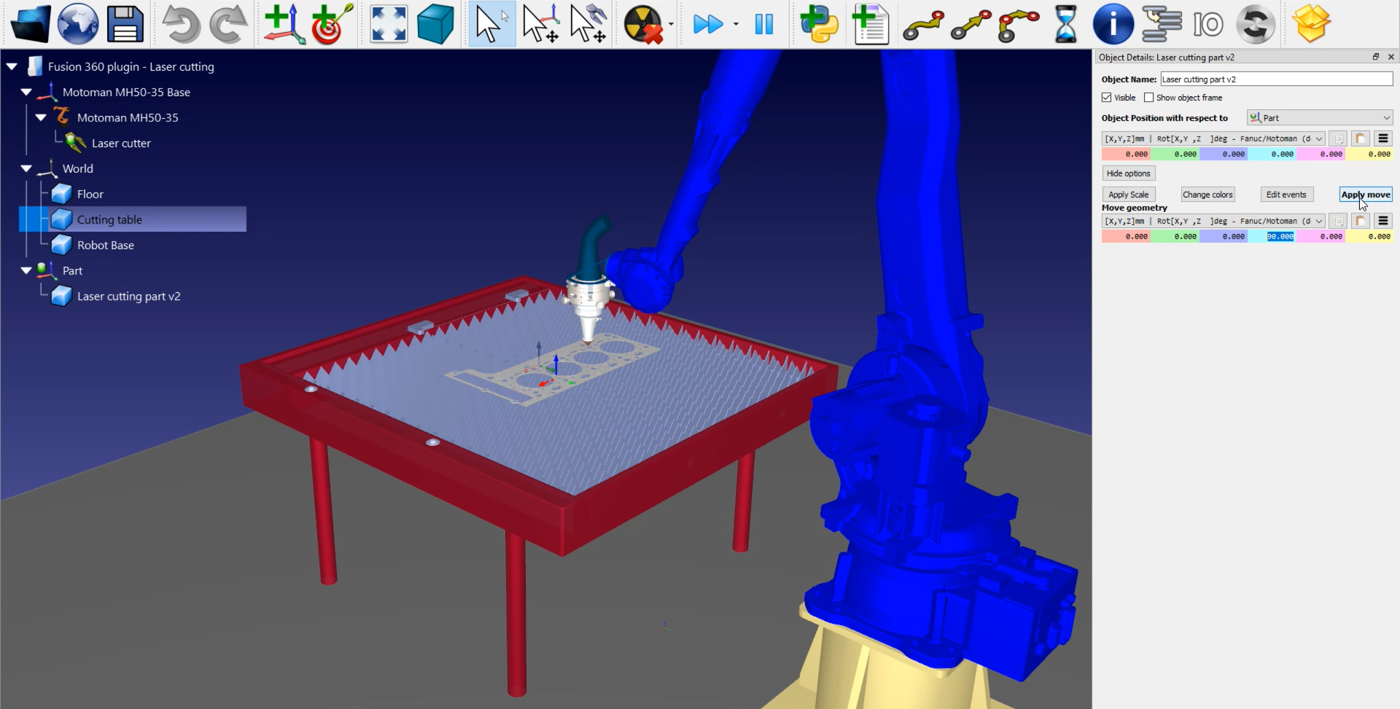
A peça foi importada no frame de referência ativo de sua estação RoboDK. Certifique-se de que a peça tenha sido importada na orientação correta. Neste exemplo, você terá de modificar a orientação da peça.
Siga as próximas etapas para modificar a orientação de sua peça:
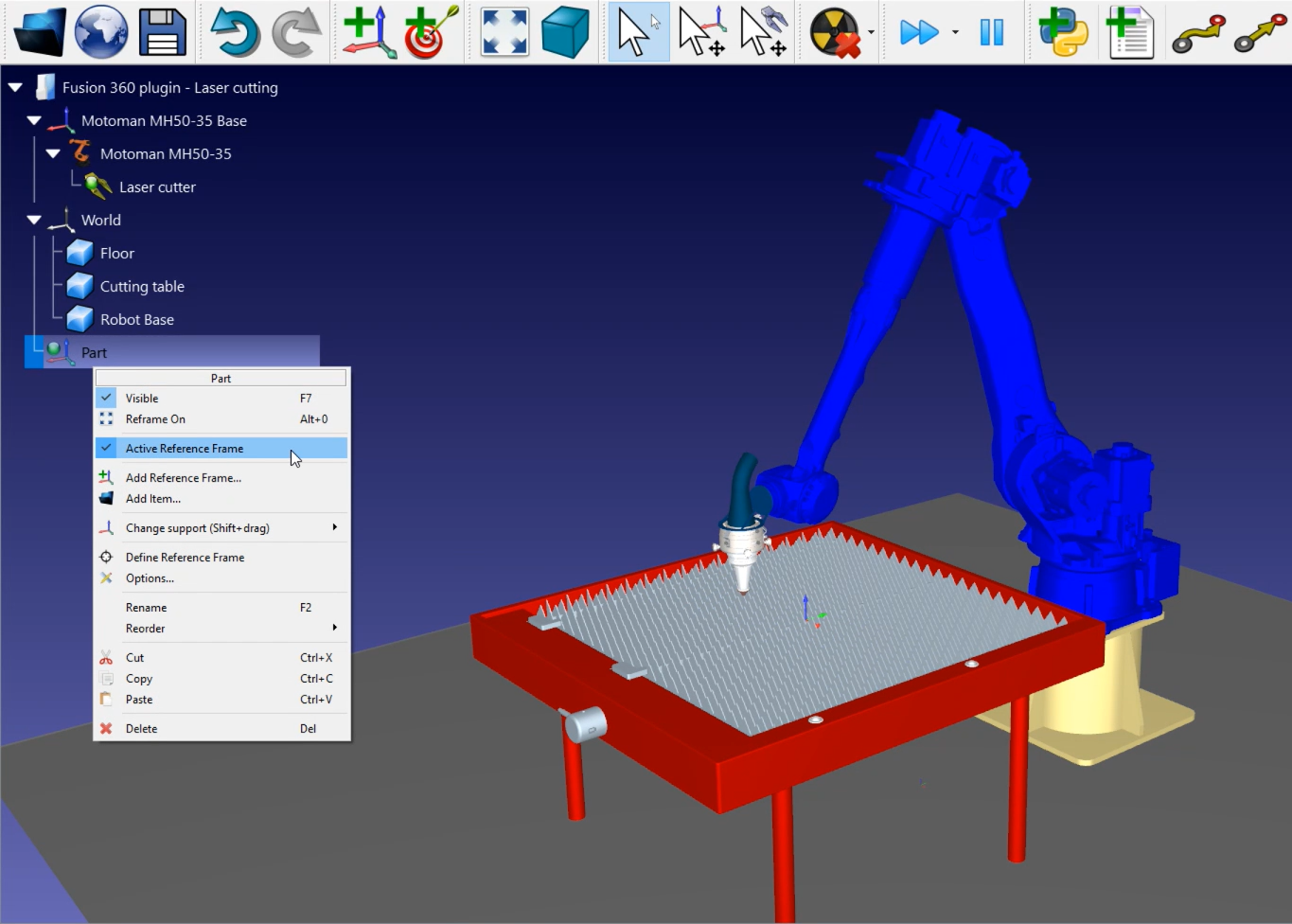
1.Clique duas vezes na peça de corte a laser
2.Clique em Mais opções no menu aberto.
3.Vá para Mover geometria e insira 90 no eixo X (azul claro), conforme mostrado na imagem acima.
4.Clique em Aplicar movimento para salvar a orientação.
O plug-in do RoboDK tem outro recurso no Fusion 360 que o ajudará a importar seu caminho de corte para o RoboDK.
1.Volte para o Fusion 360.
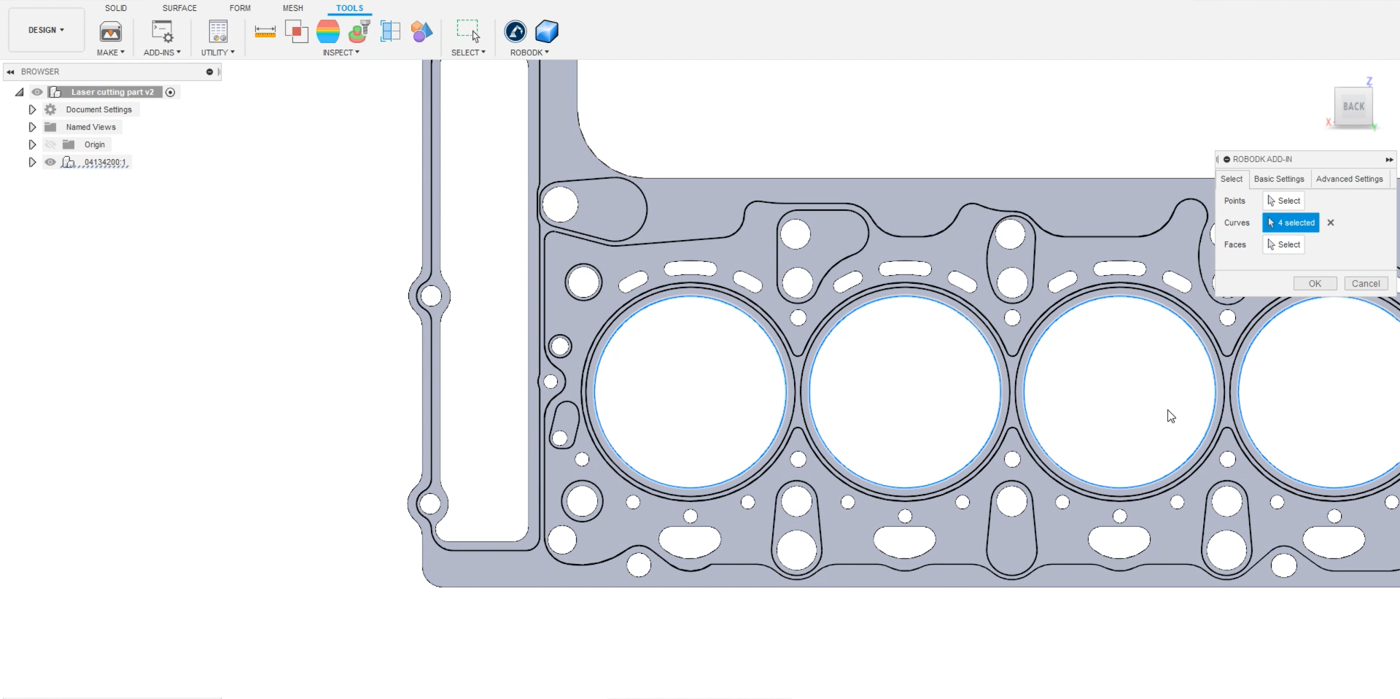
2.No menu do plug-in do RoboDK, selecione Load Curve(s).
3.Selecione Curves (Curvas) no menu aberto.
4.Selecione as bordas dos quatro círculos grandes, conforme mostrado na imagem abaixo.
Agora Você precisará dar ao RoboDK uma orientação para a ferramenta do robô.
1.Selecione Faces no menu aberto.
2.Selecione as faces para as quais deseja que a ferramenta seja normal, conforme mostrado na imagem abaixo.
Agora você pode definir as configurações:
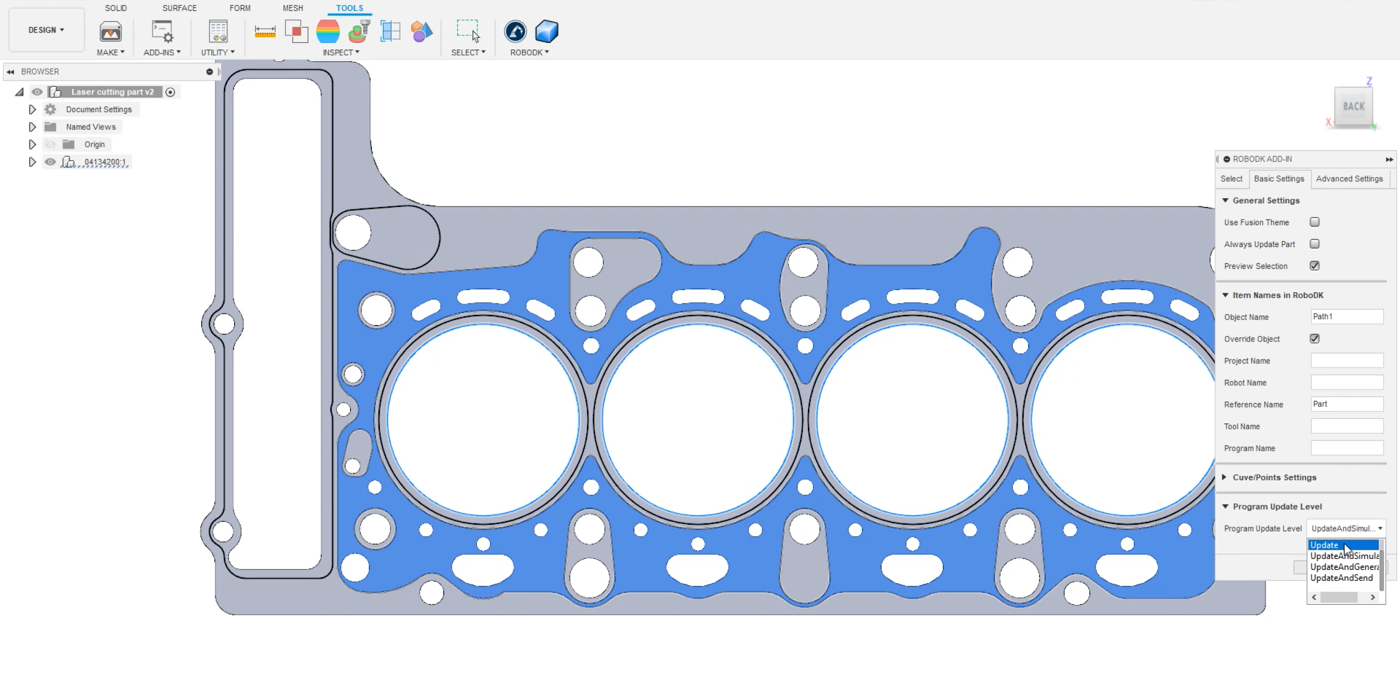
1.No mesmo menu, vá para Basic Settings (Configurações básicas).
2.Desmarque a opção Use Fusion Theme se Você preferir manter o RoboDK em seu comportamento padrão.
3.Digite um Object Name para nomear a trajetória. Neste exemplo, será Path 1.
4.Digite um nome de referência no qual você deseja que ele seja exportado. Neste exemplo, o nome é Part (Peça), o mesmo que na estação RoboDK.
5.Selecione Update (Atualizar) no Program Update Level (Nível de atualização do programa) para ter mais opções posteriormente, conforme mostrado na imagem acima. Isso é opcional.
6.Clique em OK.
Agora você deve conseguir ver o caminho importado no RoboDK. Neste exemplo, a orientação está errada novamente e você precisará modificar a orientação como fez com a peça anterior.
1.Clique duas vezes em sua trajetória; neste exemplo, é
2.Clique em Mais opções no menu aberto.
3.Vá para Mover geometria e insira 90 no eixo X (azul claro).
4.Clique em Aplicar movimento para salvar a orientação.
A próxima etapa é verificar se a ordem em que as seções do caminho serão executadas está correta, selecionando
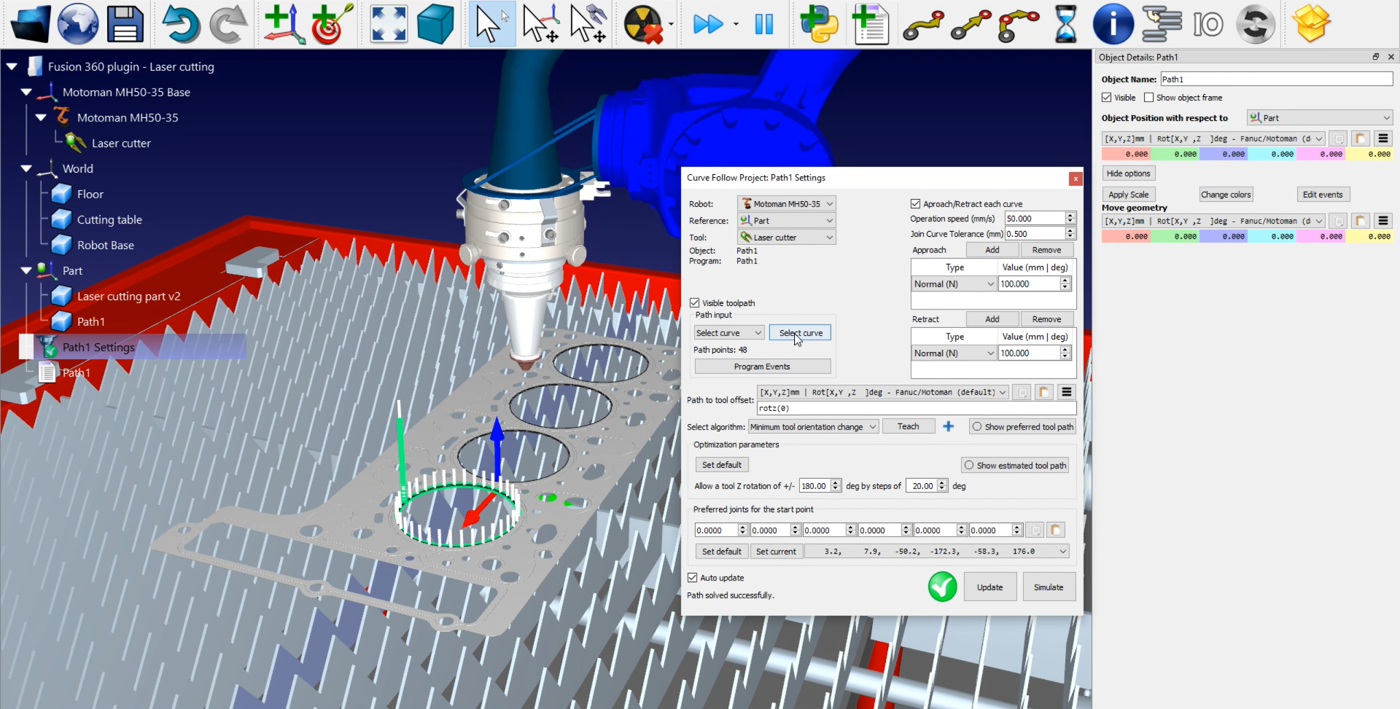
1.Clique duas vezes nas configurações da trajetória, em
2.Certifique-se de que o robô, a referência e a ferramenta sejam os corretos.
3.Clique em Selecionar curva.
4.Selecione os outros círculos.
5.Clique em
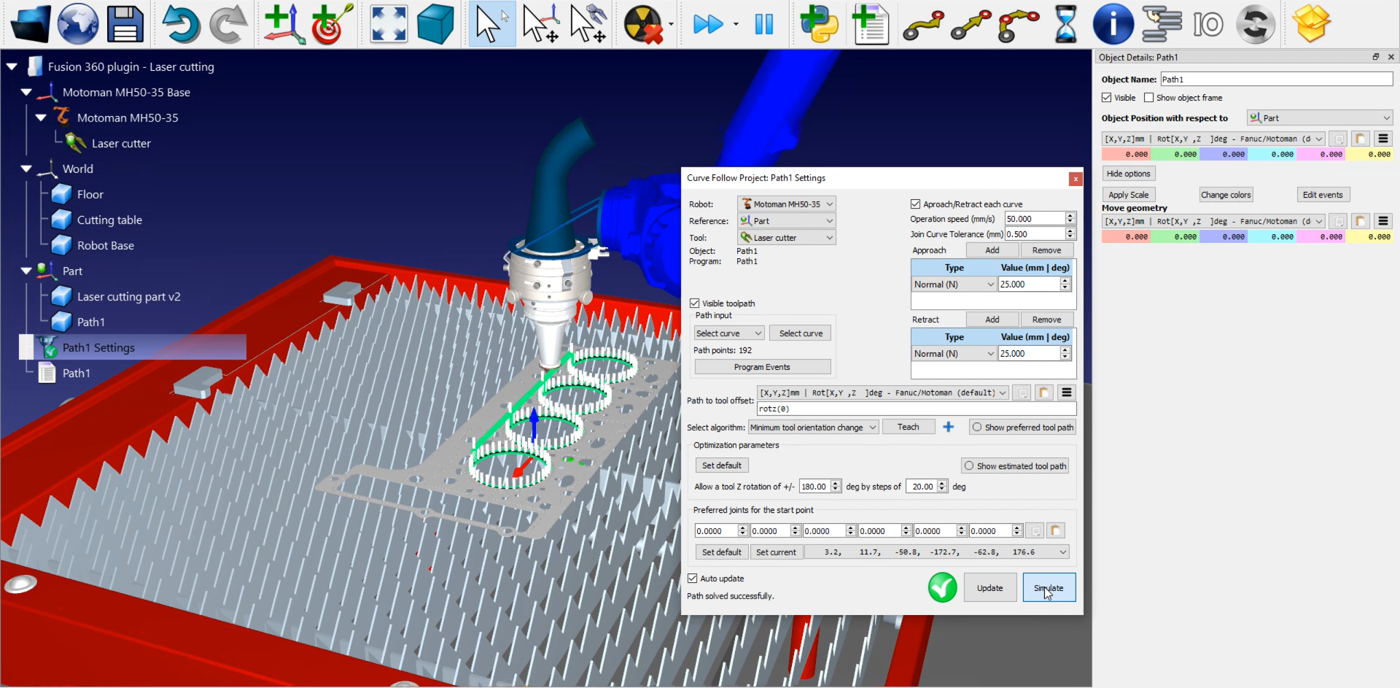
Agora você pode notar que os movimentos de aproximação e retração são um pouco longos demais em termos de comprimento.
Você pode modificar facilmente esses valores:
1.Clique duas vezes nas configurações de trajetória,
2.Digite um valor menor nas caixas Aproximação e Retração. Neste exemplo, você pode inserir 25 mm.
3.Clique em Atualizar ➔ Simular.
A próxima etapa é considerar o raio do laser. Neste exemplo, o laser está cortando muito material.
Como configurar o raio laser:
1.Volte para o Fusion 360.
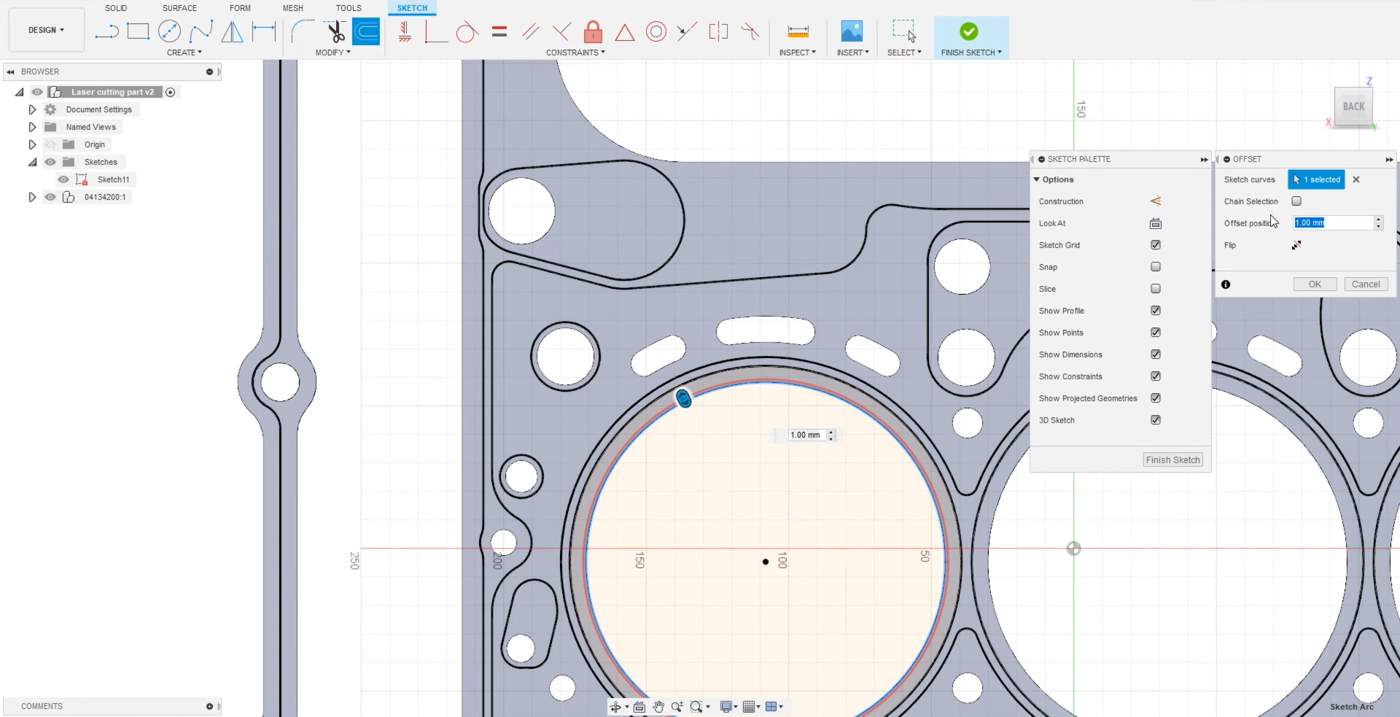
2.Acesse a guia Solid➔ Create Sketch para criar seu esboço.
3.Selecione um círculo e clique em Offset no menu superior para criar uma nova trajetória.
4.Considerando que o diâmetro do feixe de laser é de 2 mm, o raio será de 1 mm. Digite 1 na caixa Offset position, conforme mostrado na imagem abaixo.
5.Repita essas etapas para os outros três círculos.
6.Clique em Ok.
Agora Você pode carregar as curvas no RoboDK.
1.Vá para a guia Tools (Ferramentas).
2.Clique em RoboDK➔ Load Curve(s).
3.Selecione Curves (Curvas) e clique no esboço em cada círculo.
4.Selecione Faces e clique na face que deseja que a ferramenta seja normal.
5.Neste exemplo, o nome do objeto (Configurações básicas) é Path2.
6.Clique em Ok para importar o caminho para o RoboDK.
Você pode modificar a orientação do Path2 conforme explicado acima. Se Você se aproximar, poderá ver a diferença entre os dois caminhos. Agora Você pode excluir o Path1.
A próxima etapa é verificar se as seções de caminho que você carregou estão corretas:
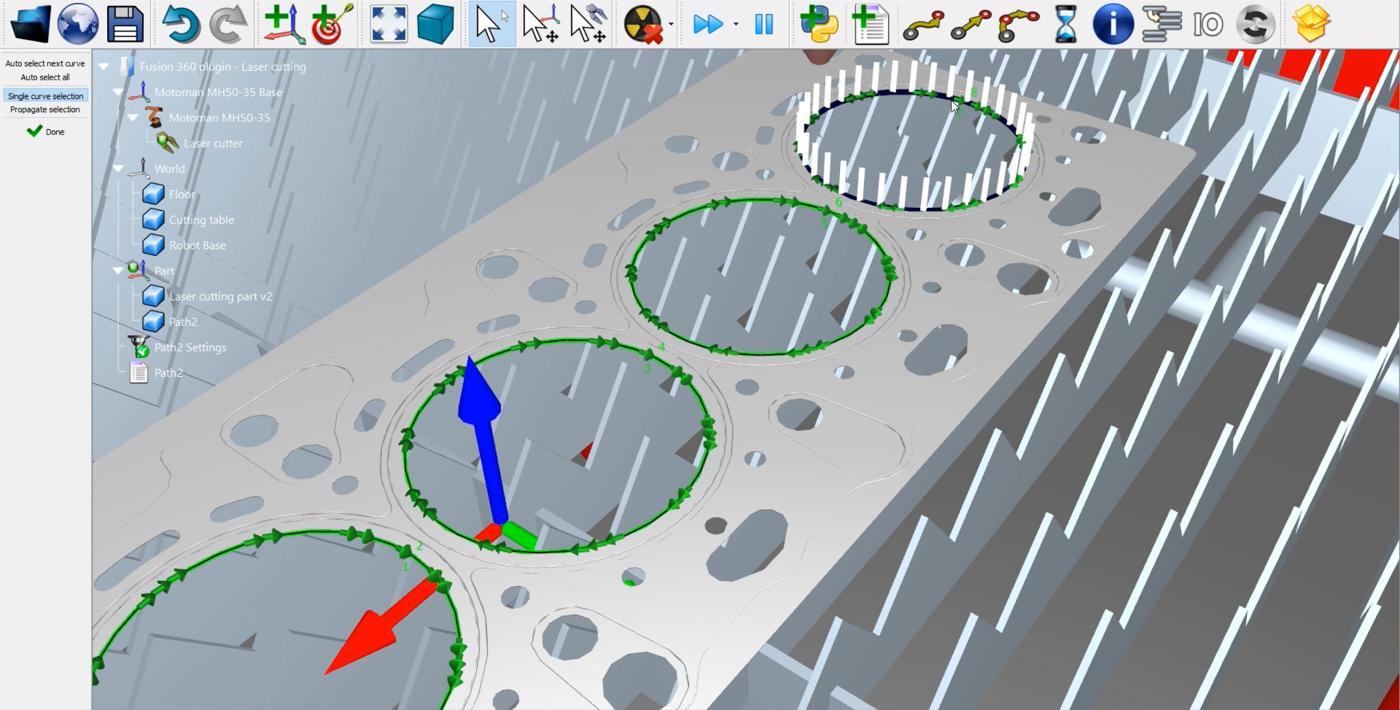
1.Selecione
2.Clique em Selecionar curva e selecione os outros círculos, conforme mostrado na imagem abaixo.
3.Selecione
Você pode reduzir o tamanho dos movimentos de aproximação e retração, conforme explicado acima. Neste exemplo, você pode inserir novamente 25 mm. Não se esqueça de atualizar➔ Simular seu projeto de seguimento de curva para salvar suas configurações. Você pode executar as mesmas etapas para todos os outros furos dessa peça.
Essa maneira de criar um programa de corte a laser funciona com o plug-in Fusion 360 do RoboDK, mas também funciona com todos os plug-ins CAD.
Método 2: Recursos de corte a laser do Fusion 360
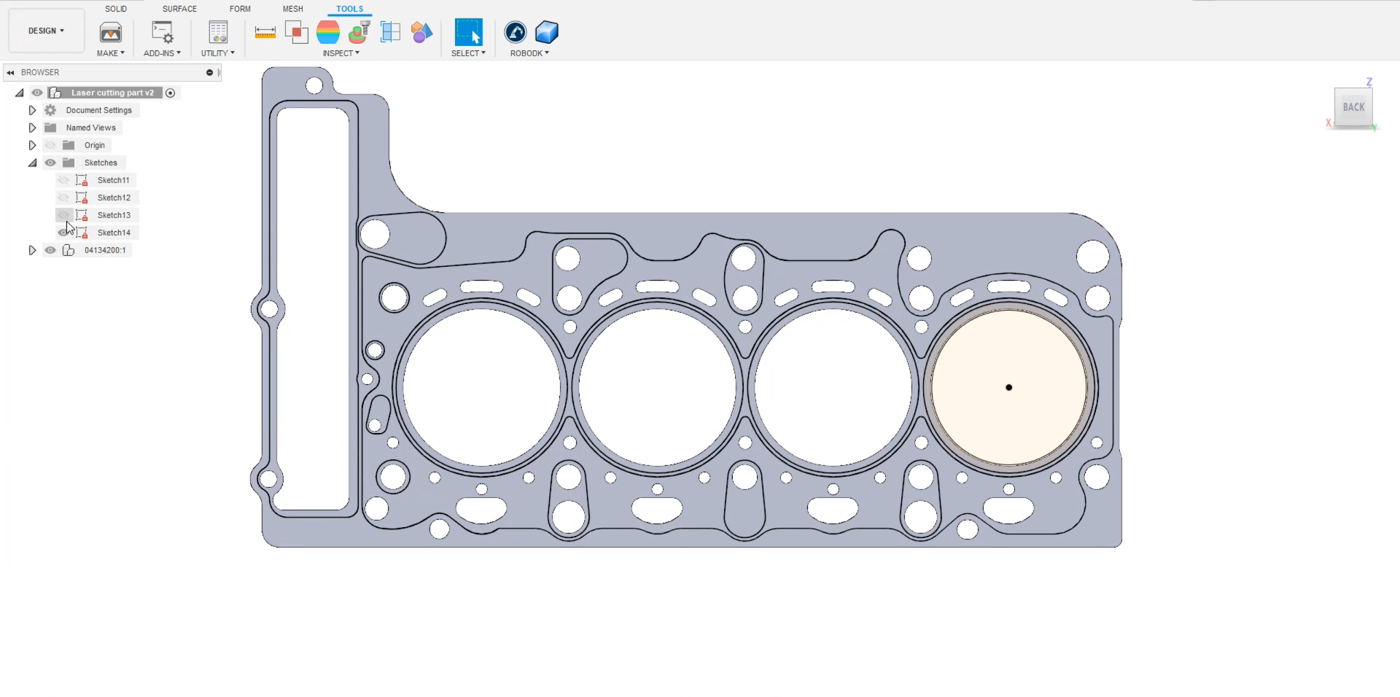
Para usar os recursos de corte a laser do Fusion 360, volte ao Fusion e oculte os esboços que você fez anteriormente, conforme mostrado na imagem abaixo.
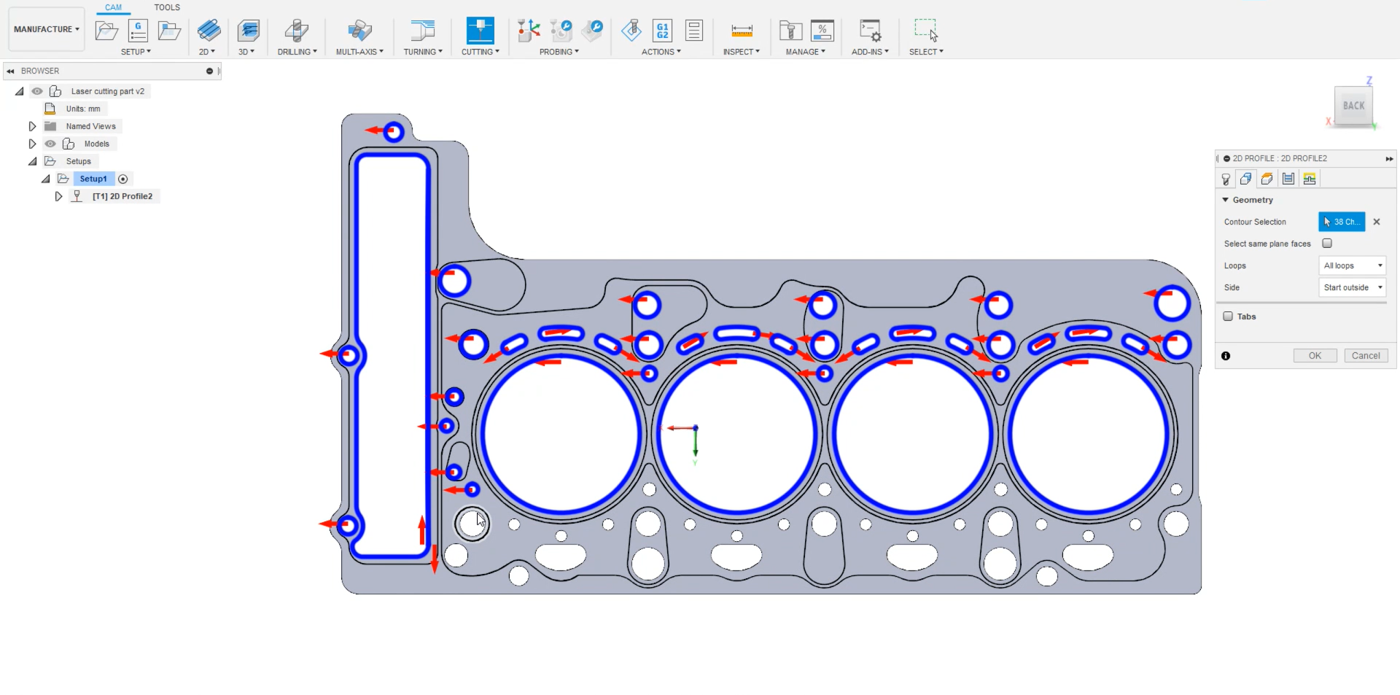
Mude da seção Design, no menu superior esquerdo, para Manufacture. Na barra de ferramentas, clique no recurso de corte 2D.
1.Selecione uma ferramenta. Neste exemplo, é um cortador de 1 mm de largura.
2.Vá para a guia Geometry (Geometria) no mesmo menu e selecione os círculos que deseja cortar. Neste exemplo, todos os orifícios da peça de metal estampada são selecionados conforme mostrado na imagem abaixo.
3.Clique em OK.
Você pode simular o caminho no Fusion 360 clicando com o botão direito do mouse no caminho e selecionando Simulate (Simular). Em Setup (Configuração), certifique-se de que você esteja usando a mesma origem do modelo. Dessa forma, ele será exportado na posição correta.
1.Clique com o botão direito do mouse em Setup1➔ Edit.
2.Certifique-se de que a origem do modelo esteja selecionada na caixa Origem.
3.Selecione Ok.
Agora Você pode transferir seu esboço para o RoboDK selecionando Tools➔ Load CAM project in RoboDK na guia Fusion 360.
Você deverá ver o esboço importado no RoboDK. Certifique-se de excluir o caminho anterior, neste exemplo, Path2. Clique duas vezes em
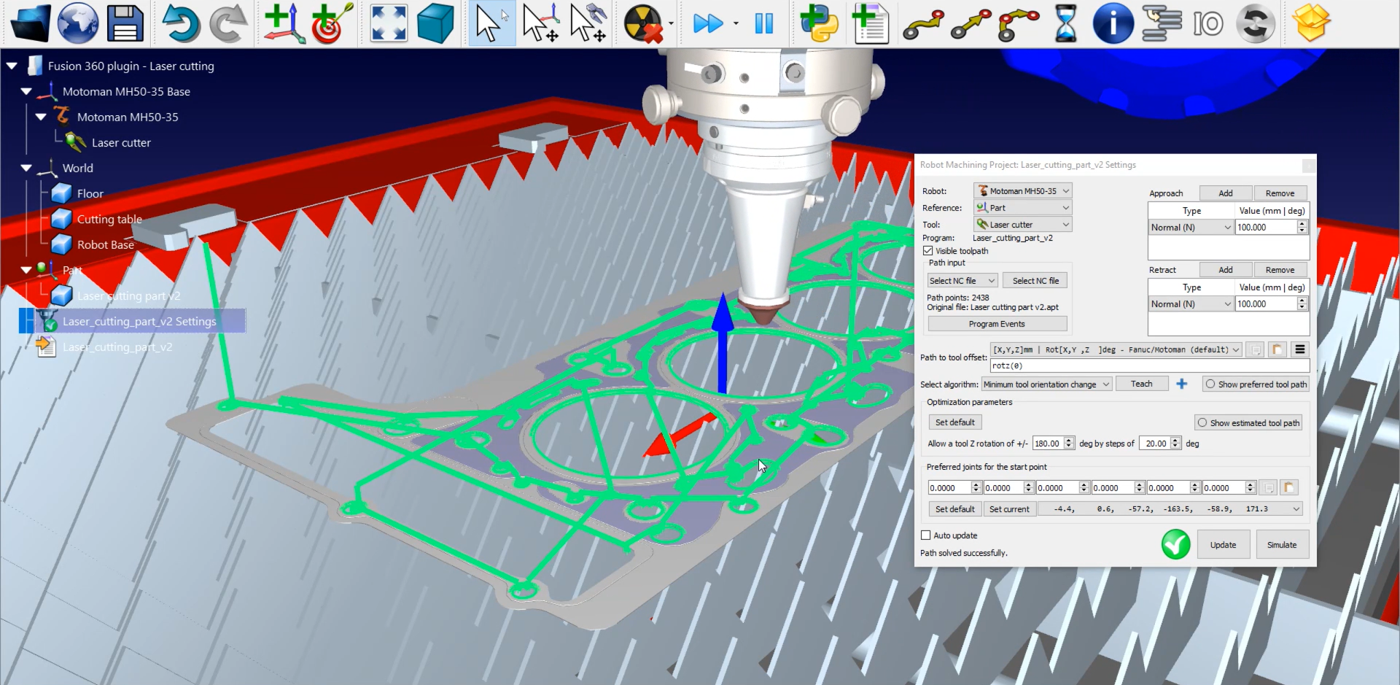
A única coisa a ser gerenciada são os eventos do programa:
1.Clique em Eventos de Programa.
2.Deixe as três primeiras caixas de texto livres, pois você não está fazendo um projeto de usinagem com um fuso, várias ferramentas ou algum RPM específico a ser alcançado.
3.Marque a caixa Início da trajetória e escreva LaserOn para ativar o laser somente quando o caminho começar
4.Marque a caixa Fim da trajetória e escreva LaserOff para desativar quando o caminho terminar.
5.Clique em Ok e Update.
Para gerar o programa do robô, clique com o botão direito do mouse em
O arquivo .jbi agora está pronto para ser transferido para o controlador do robô.