Pick and Place
Introdução ao Pick and Place
Pick and Place refere-se ao processo automatizado em que os robôs coletam peças ou itens de um local e os colocam em outro local. A automação das operações de Pick and Place ajuda a aumentar as taxas de produção.
Os robôs Pick and Place podem lidar com tarefas repetitivas, liberando os trabalhadores humanos para se concentrarem em trabalhos mais complexos. Esses sistemas robóticos são um componente crucial em muitas linhas de fabricação e produção para automatizar tarefas repetitivas e demoradas.
Vídeo: Assista a este vídeo tutorial que apresenta o Pick and Place com robôs: Pick and Place - Webinar do RoboDK.
Os robôs podem realizar facilmente operações de Pick and Place. Embora existam robôs dedicados a determinadas aplicações de Pick and Place (como paletização ou robôs Scara para montagem de PCB), um robô genérico de 6 eixos é adequado para qualquer operação de Pick and Place.
Exemplos de Pick and Place
Você pode encontrar alguns projetos de exemplo para realizar simulações de Pick and Place nesta seção da documentação.
Os exemplos desta seção incluem:
1.Um exemplo simples de Pick and Place em que um robô pega uma peça e a deixa em outro lugar.
2.Um exemplo de Pick and Place com uma operação de montagem.
3.Um exemplo de Pick and Place usando o Add-in de paletização.
4.Um exemplo de escolha e colocação usando a API.
Exemplo simples de Pick and Place
Esta seção mostra um exemplo simples de Pick and Place usando um robô com uma garra a vácuo que move uma caixa.
Siga estas etapas para criar seu exemplo de Pick and Place:
Crie um novo projeto RoboDK
Estas etapas mostrarão a você como criar um novo projeto (também conhecido como estação) no RoboDK para uma aplicação de Pick and Place.
1.Abrir o RoboDK: Inicie o aplicativo RoboDK em seu computador.
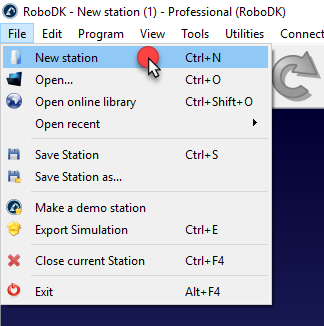
2.Crie uma nova estação: Selecione Arquivo – Nova Estação no menu principal do RoboDK - uma nova estação vazia será criada como seu espaço de trabalho.
3.Adicione um robô da biblioteca
a.Abra a biblioteca on-line de robôs para fazer o download de um robô
i.No menu principal, selecione Arquivo → Abrir biblioteca on-line.
ii.A janela da biblioteca do RoboDK será aberta, exibindo uma variedade de robôs industriais.
b.Selecionar e importar um robô:
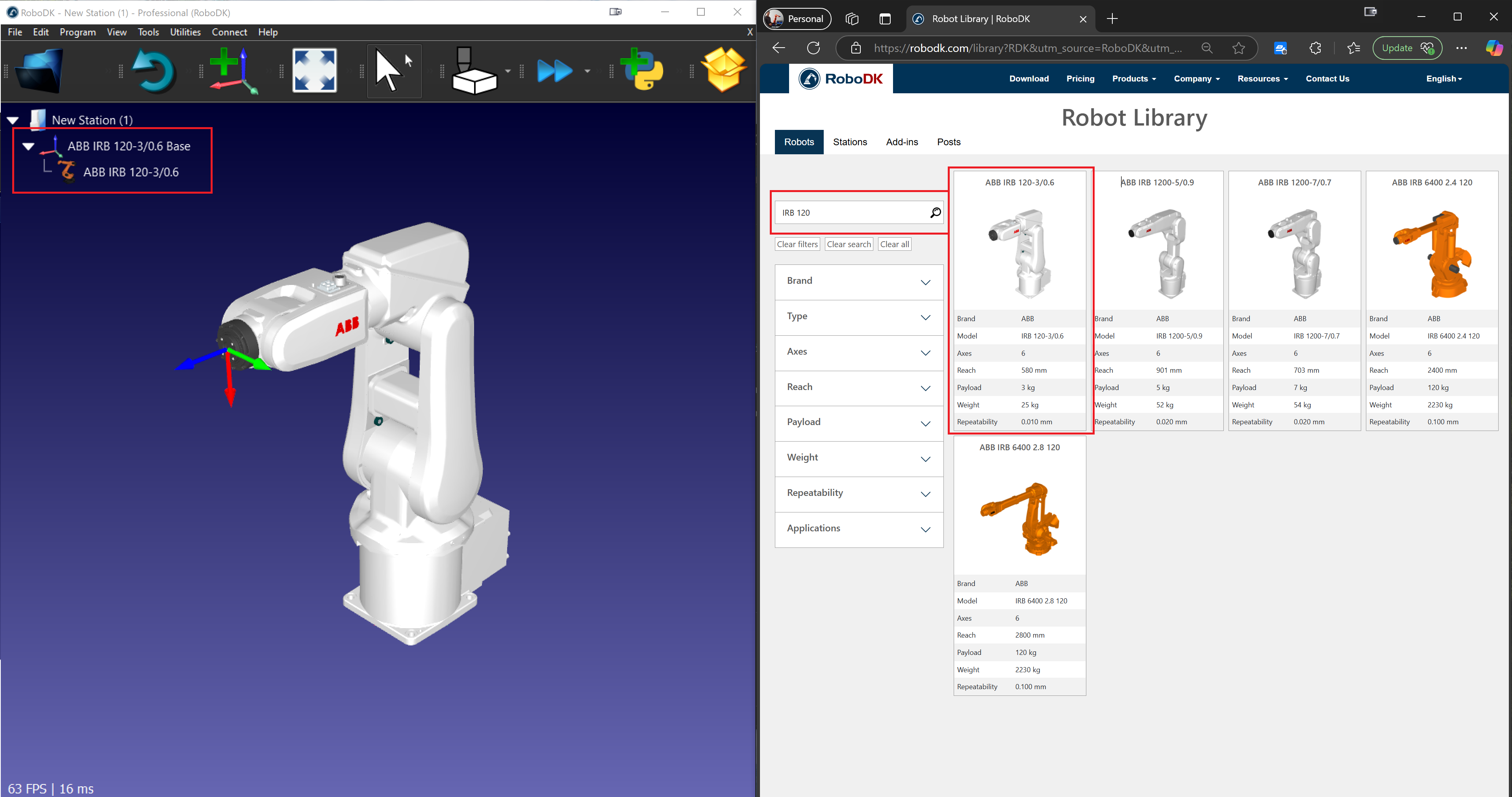
i.Use a barra de pesquisa para encontrar um robô adequado para tarefas de Pick and Place (por exemplo, UR10, ABB IRB 120, Fanuc LR Mate).
ii.Clique no robô desejado e selecione Download.
c.Posicione o robô na estação:
i.O robô aparecerá automaticamente na estação.
ii.Use a ferramenta Mover para ajustar o posicionamento, se necessário.
4.Adicione um frame de referência
a.Criar um frame de referência:
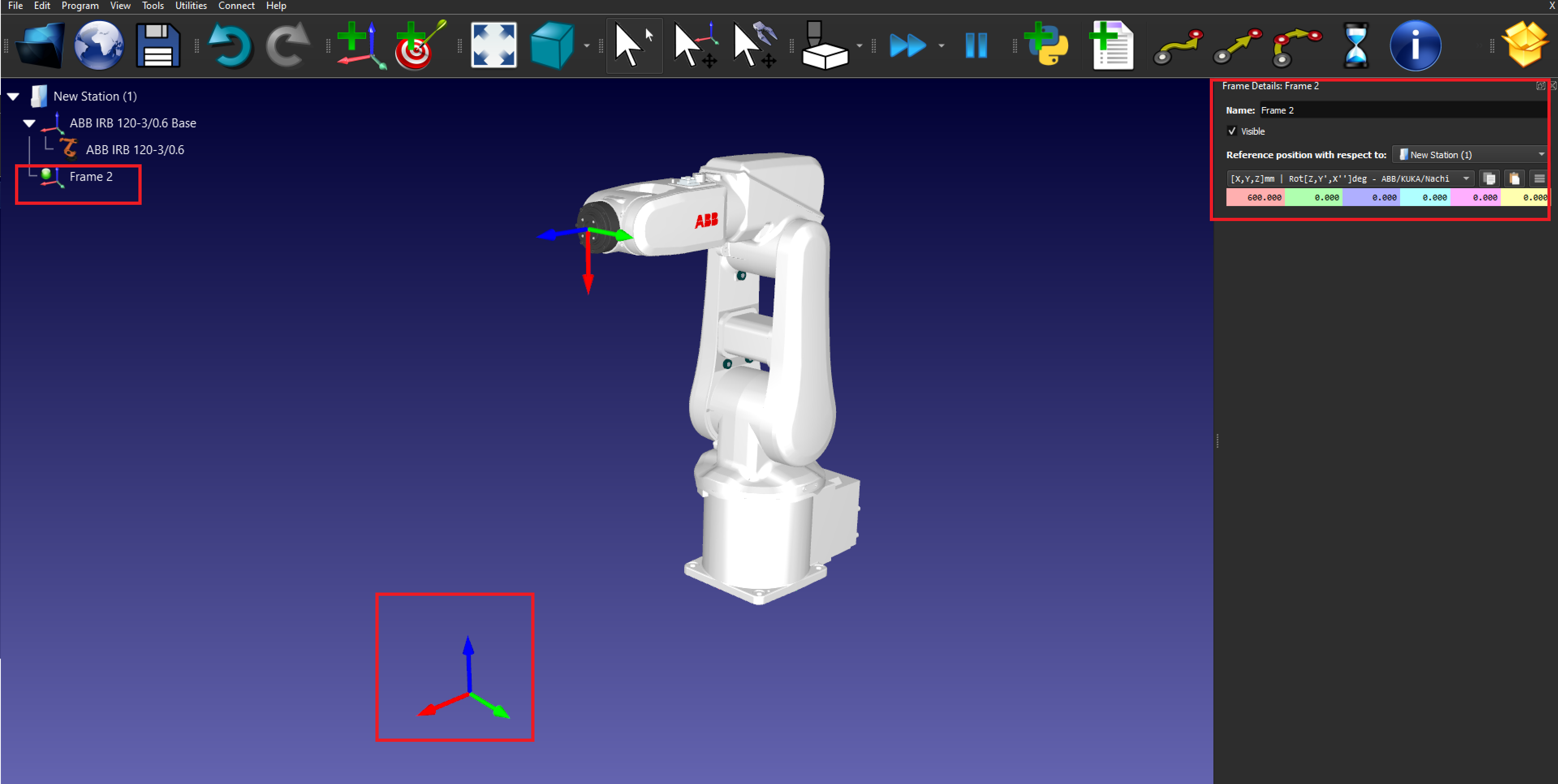
i.Vá até Programa → Adicionar Frame de Referência.
ii.Um novo frame de referência aparecerá na árvore de estações e na visualização 3D.
b.Posicione o frame de referência:
i.Clique duas vezes no frame de referência para inserir as coordenadas (X, Y, Z) e os valores de rotação.
ii.Clique em OK para salvar a posição.
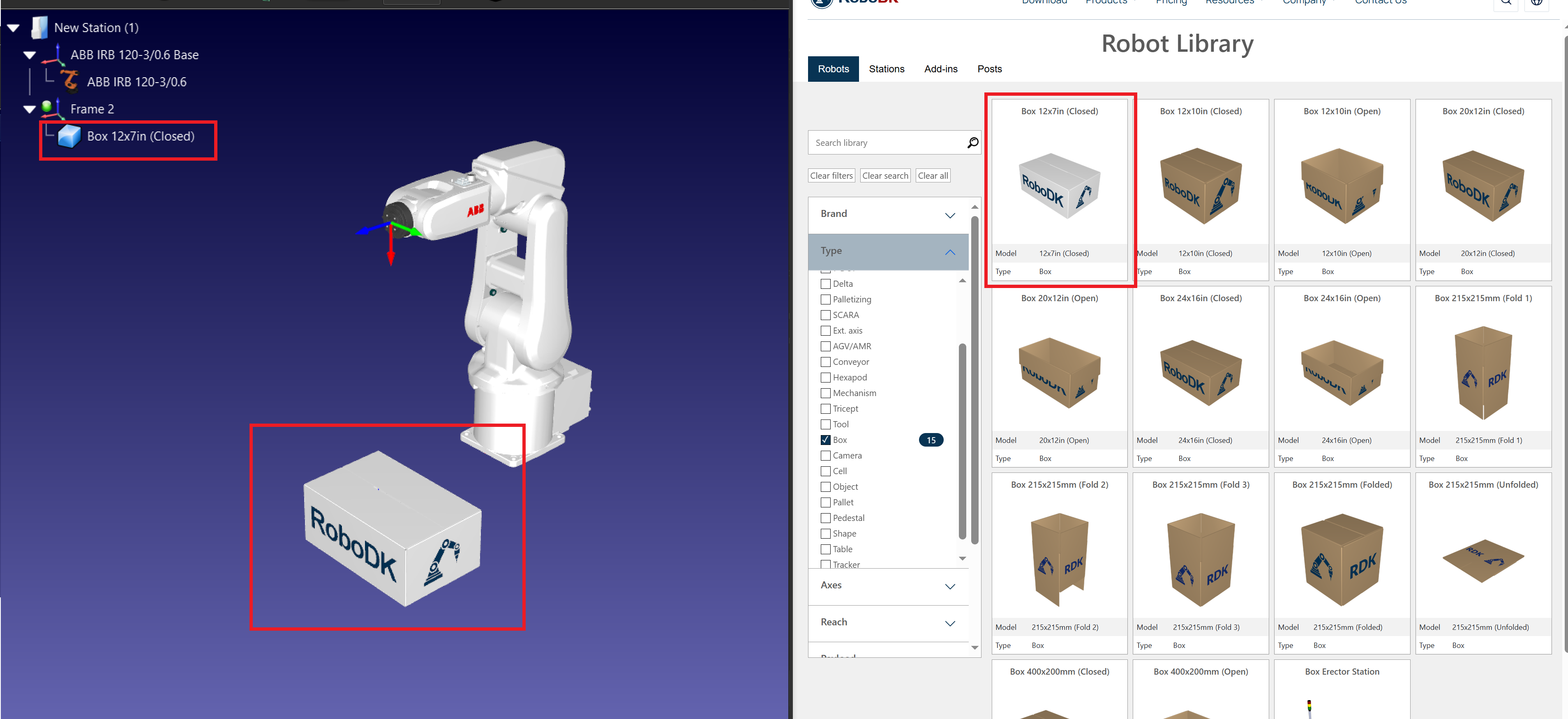
5.Importar objetos 3D
a.Carregar modelos de objetos:
iii.No menu principal, selecione Arquivo → Abrir.
iv.Procure e selecione os modelos 3D dos objetos a serem coletados e posicionados (por exemplo, arquivos STEP, IGES).
b.Posicione os objetos:
v.Use a ferramenta Mover para ajustar o posicionamento do objeto no frame de referência.
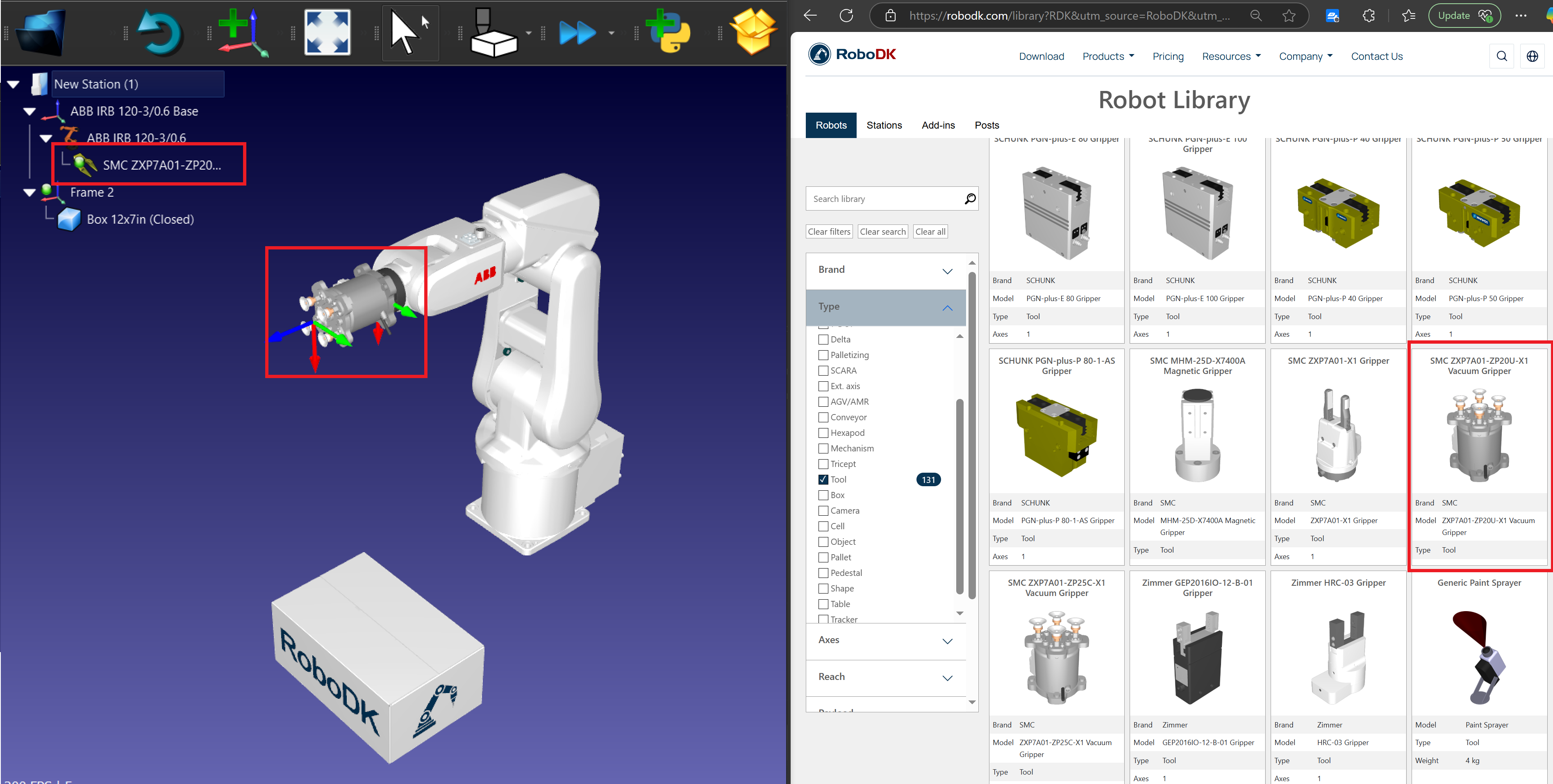
6.Adicione uma Ferramenta (Garra)
a.Selecione uma garra:
i.No menu principal, vá para Utilitários → Adicionar Ferramenta (TCP).
ii.Escolha uma garra da Biblioteca do Robô ou importe um arquivo de garra personalizado.
b.Fixe a ferramenta no robô:
i.Clique com o botão direito do mouse na garra na árvore de estações e selecione Anexar ao robô.
ii.Escolha o flange do robô.
c.Defina o TCP (ponto central da ferramenta): Clique duas vezes na ferramenta e insira as coordenadas do TCP em relação ao flange do robô.
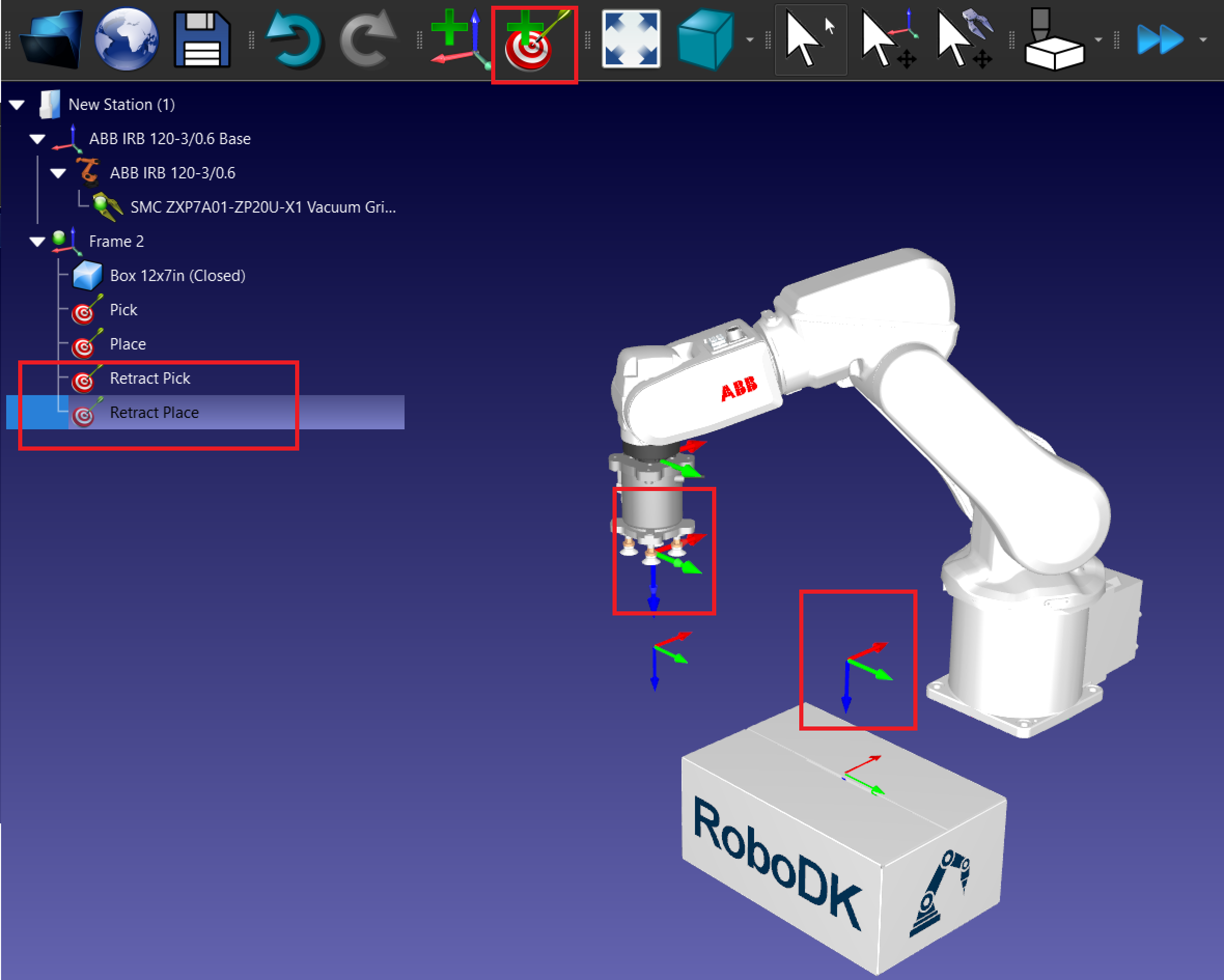
Criar Pontos para Pick and Place
Siga estas etapas para criar um Ponto básico no RoboDK para o aplicativo Pick and Place
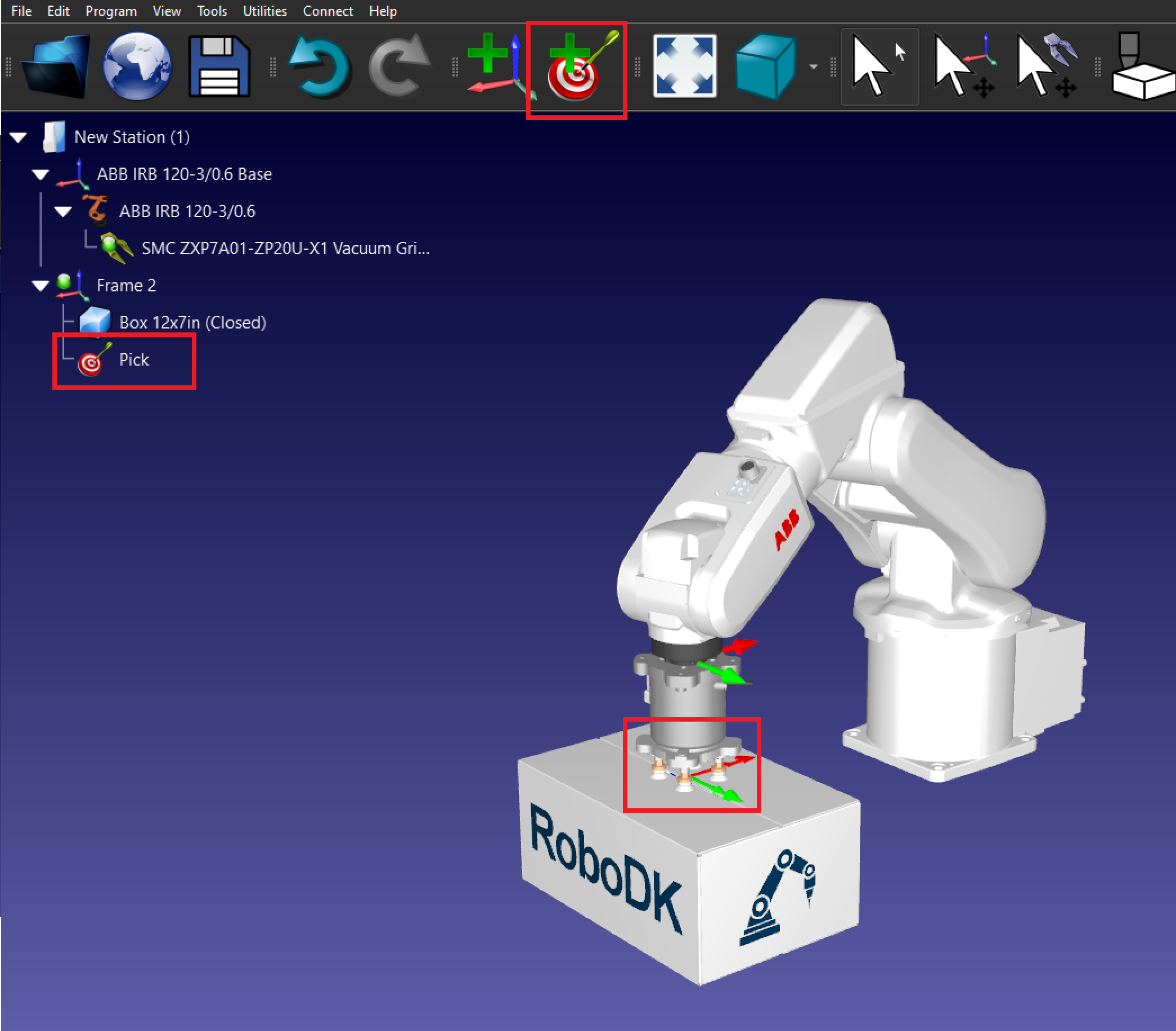
7.Adicione pontos de Pick and Place:
a.Mova o robô para a posição de retirada desejada.
b.Selecione Programa → Criar Ponto para salvar a posição.
c.Repita o procedimento para as posições Pick, Retract Pick, Place e Retract Place.
8.Organizar as metas:
a.Renomeie os pontos para maior clareza (por exemplo, Approach_Pick, Pick, Place). Pressione F2 para renomear os Pontos.
b.Não se esqueça de criar os pontos nos frames de referência relevantes na árvore de estações.
9.Crie o ponto Pick: Coloque o robô sobre a caixa e crie um ponto chamado Pick.
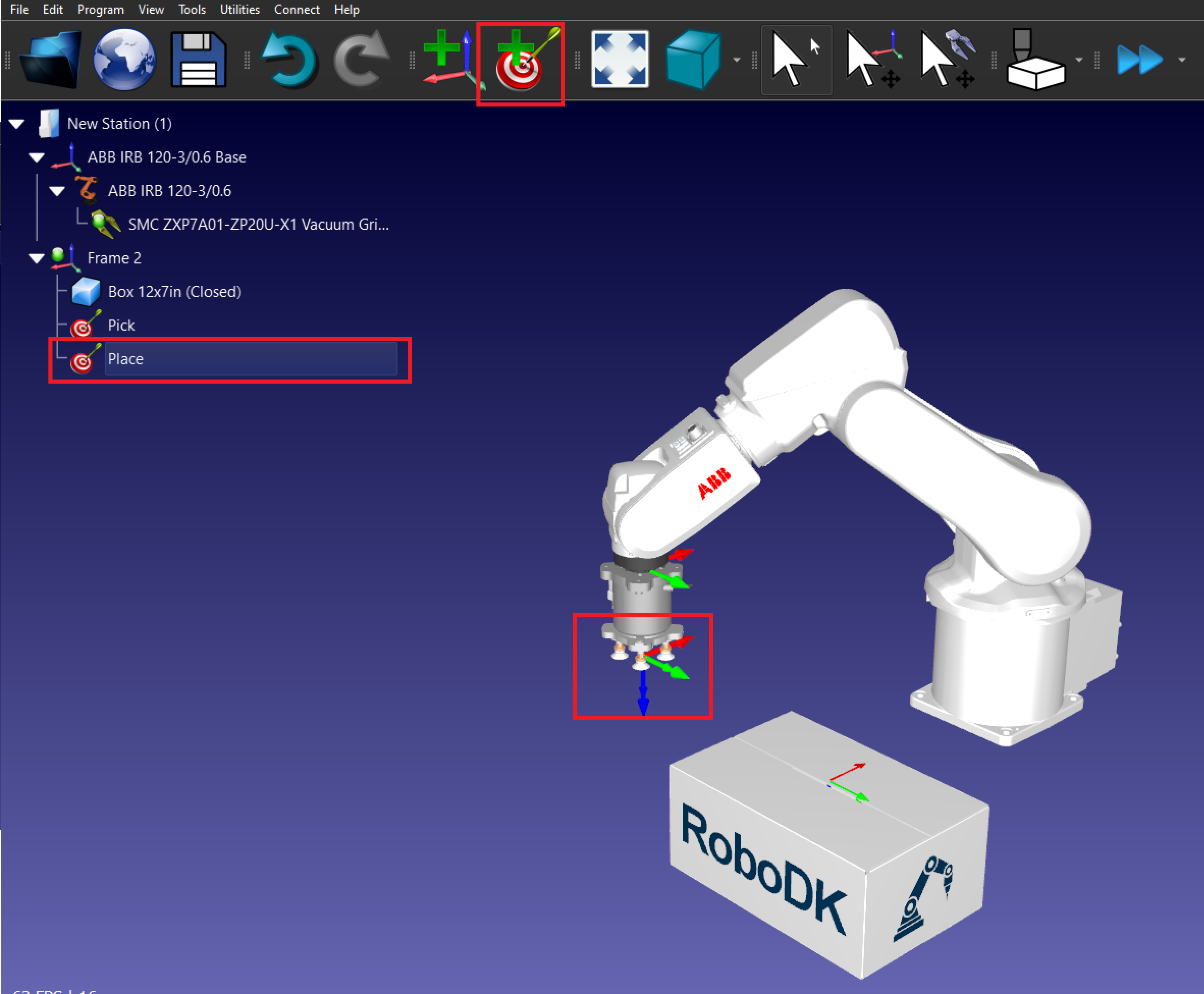
10.Crie o ponto Place: Mova o robô para onde você deseja colocar a caixa e crie um Ponto chamado Place.
11.Crie os ontos Retract:
a.Mova o robô para o ponto Pick e para cima no eixo Z.
b.Crie um novo ponto chamado Pick Retract.
c.Repita o procedimento com o Ponto Place.
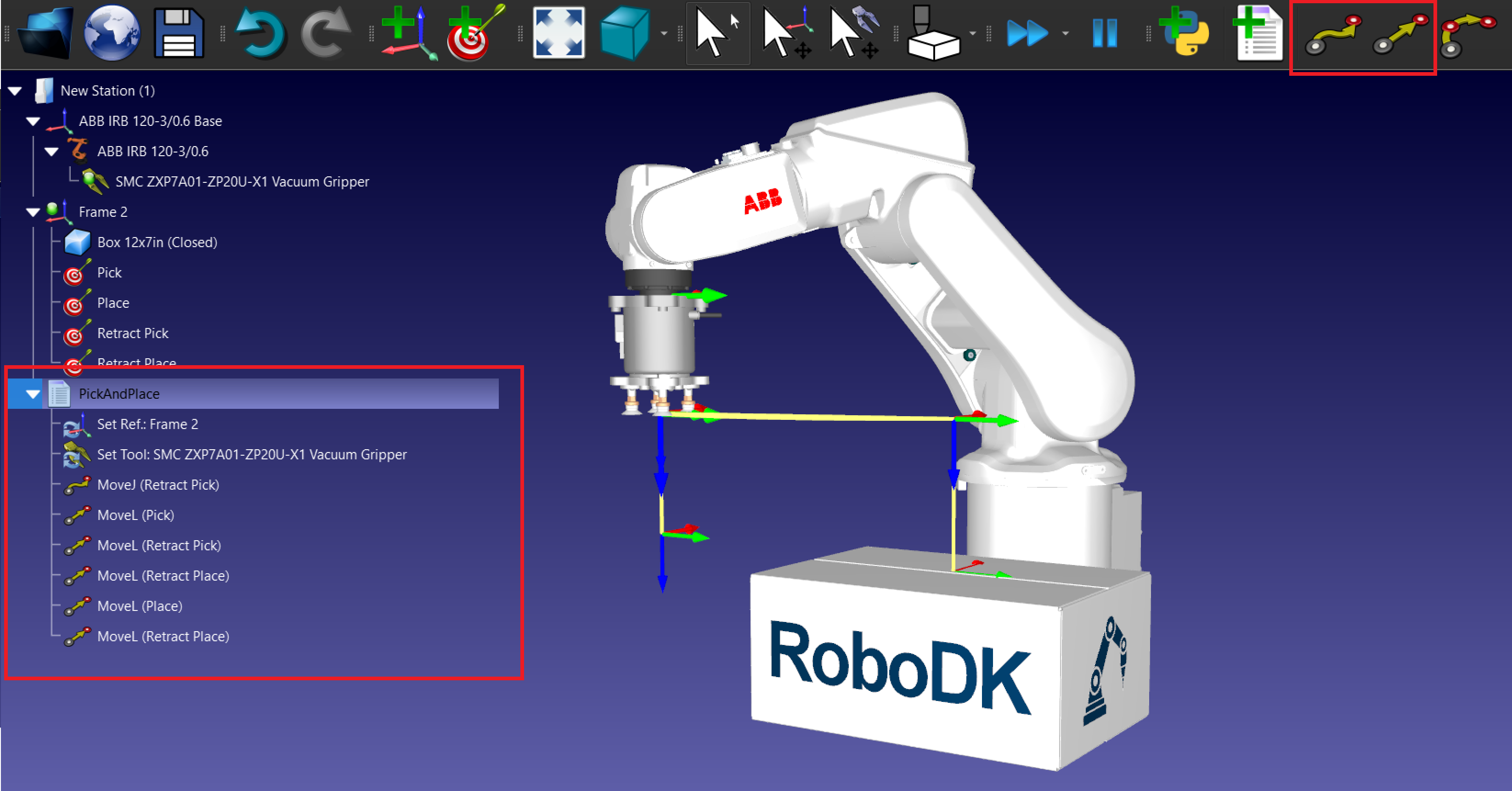
Criar programa de Pick and Place
Siga estas etapas para criar um programa básico de Pick and Place no RoboDK com um robô de 6 eixos usando uma garra a vácuo para mover uma caixa.
1.Programar a operação de Pick and Place:
a.Crie um novo programa: Vá até Programa → Adicionar Programa e dê a ele o nome de PickAndPlace.
b.Add-in Instruções de movimento:
i.Adicione instruções MoveJ ou MoveL para cada ponto.
ii.Mova o robô para o ponto de retração primeiro e, em seguida, crie um MoveL para o ponto Pick e volte para a retração.
iii.Repita o procedimento com o ponto Place.
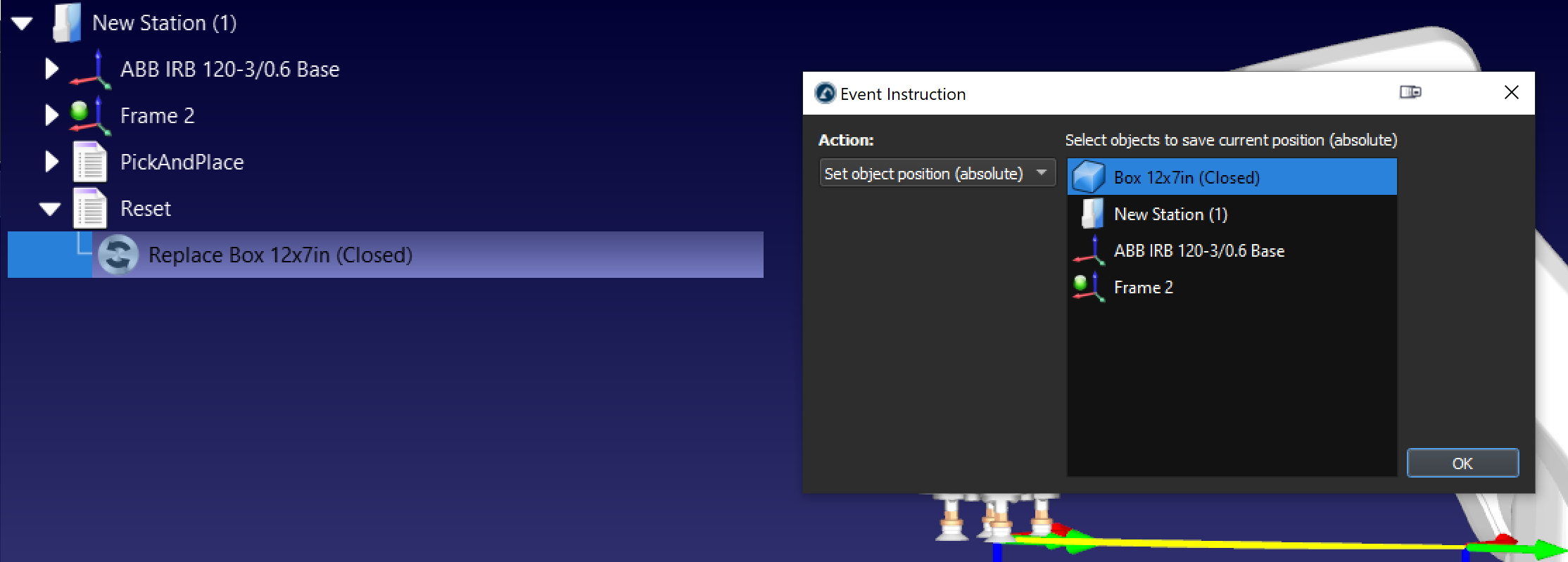
2.Adicione um evento para selecionar e posicionar o objeto.
a.Para adicionar um evento, vá para Programa → Instrução de Simulação de Evento.
b.Adicione um evento com a ação Anexar objeto para pegar a caixa após o MoveL (Pick).
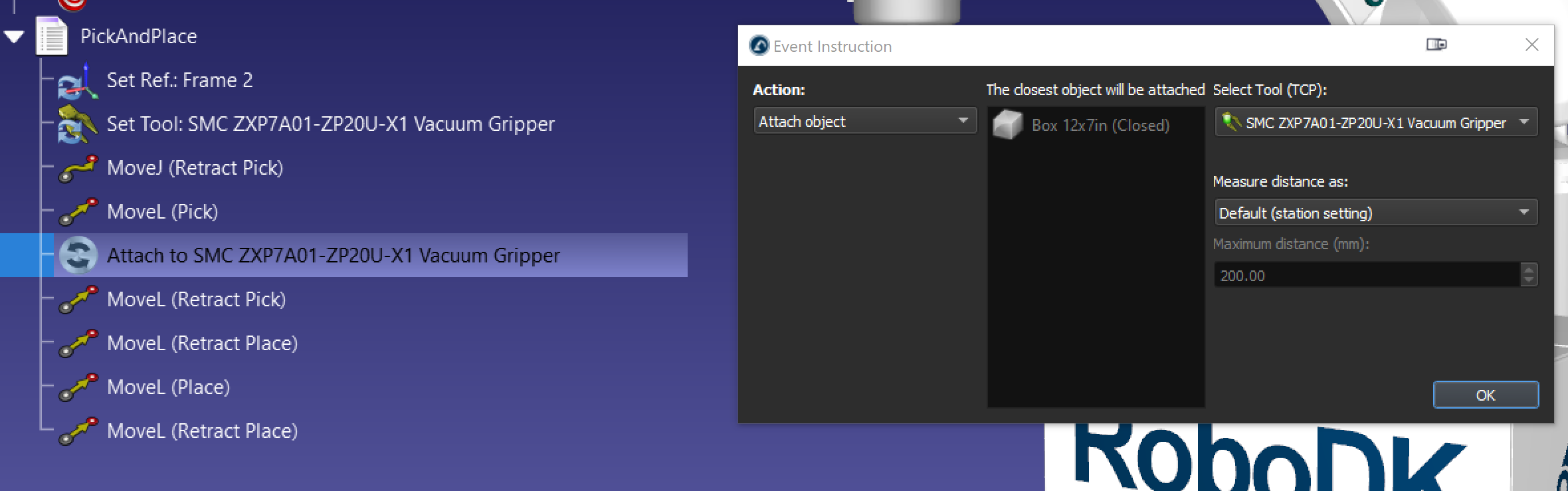
c.Adicione um evento com a ação Desanexar objeto para colocar a caixa após o MoveL (Place). A opção Anexar ao pai permite anexar o objeto a um novo objeto depois que ele for desconectado da garra.
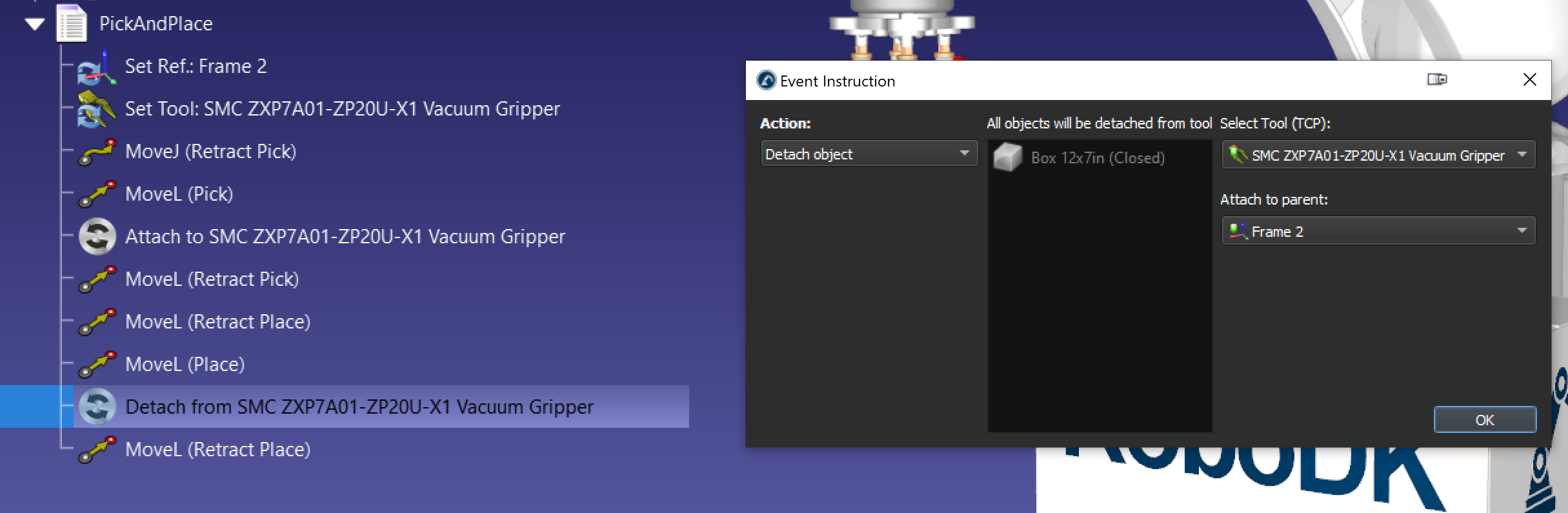
d.É uma boa prática criar também um programa separado com uma ação de evento Definir posição do objeto para redefinir a caixa para sua posição original, se necessário.
Seguindo essas etapas, você pode criar com sucesso uma estação básica de Pick and Place no RoboDK.
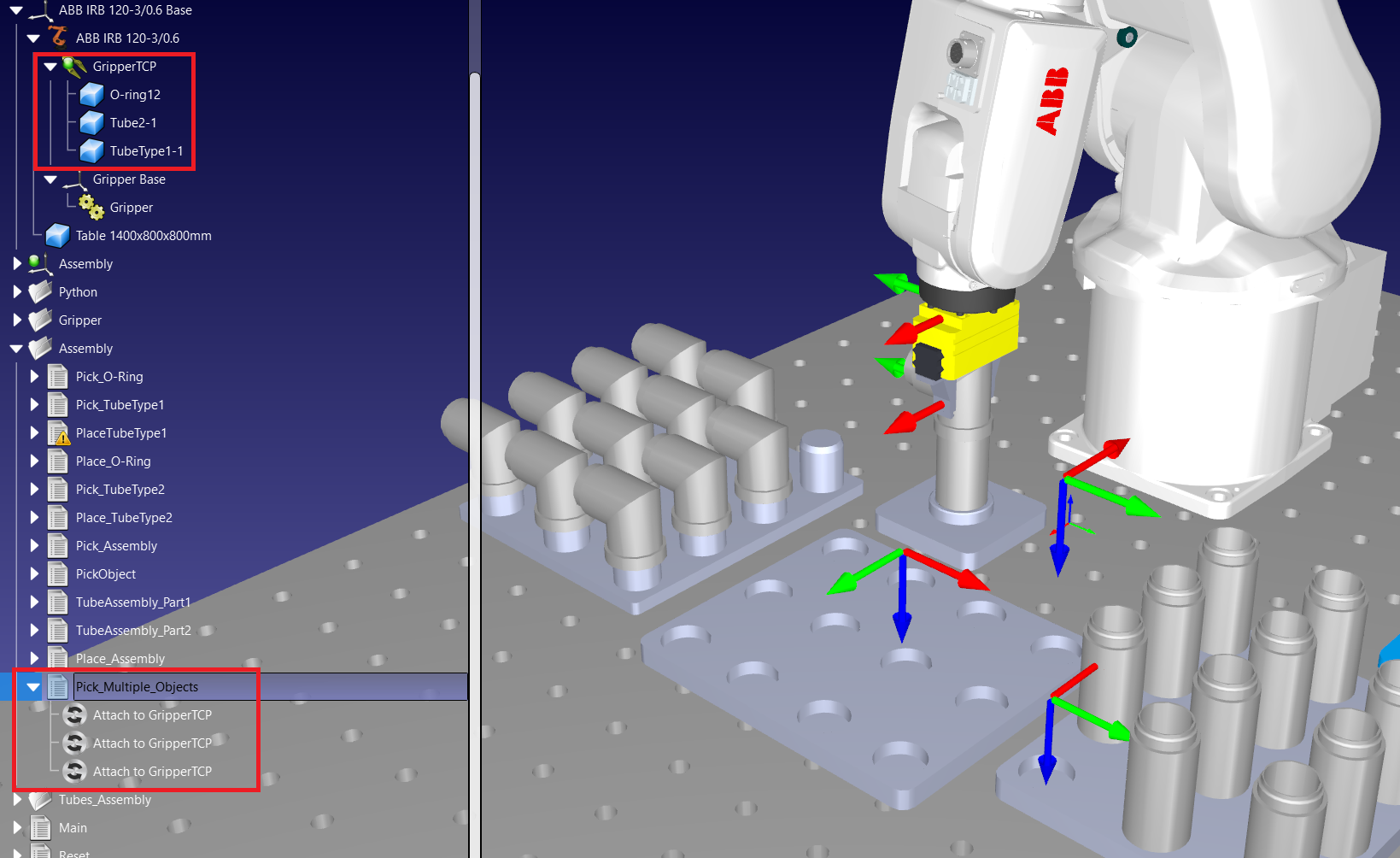
Pick and Place e montagem
A aplicações de Pick and Place podem ser usadas para automatizar uma operação de montagem. Ao usar o evento "anexar objeto" várias vezes, você pode pegar vários objetos de uma vez e criar uma coleta de montagem. Por exemplo, se você tiver 3 objetos na montagem, poderá usar o evento 3 vezes, conforme mostrado na imagem a seguir.
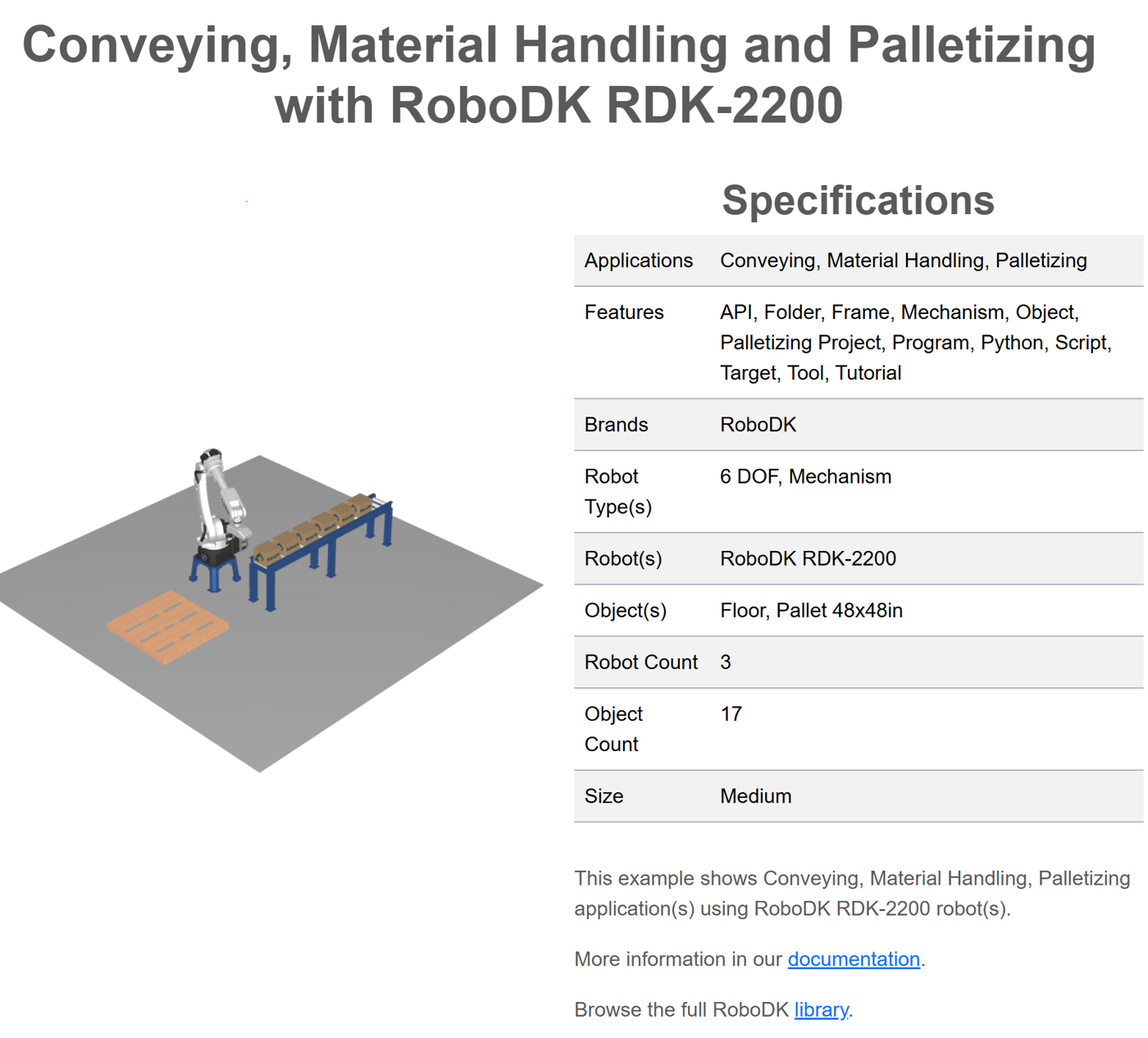
Pick and place usando o Add-in de paletização
Se Você tiver uma operação repetitiva de Pick and Place que envolva um padrão de paletização, poderá usar nosso plug-in de paletização para simplificar a tarefa. Basta usar o link a seguir e fazer o download do nosso plug-in de paletização: Palletizing | Add-in Marketplace. Siga nossa documentação de paletização para obter mais informações sobre o plug-in de paletização
Pick and Place usando a API
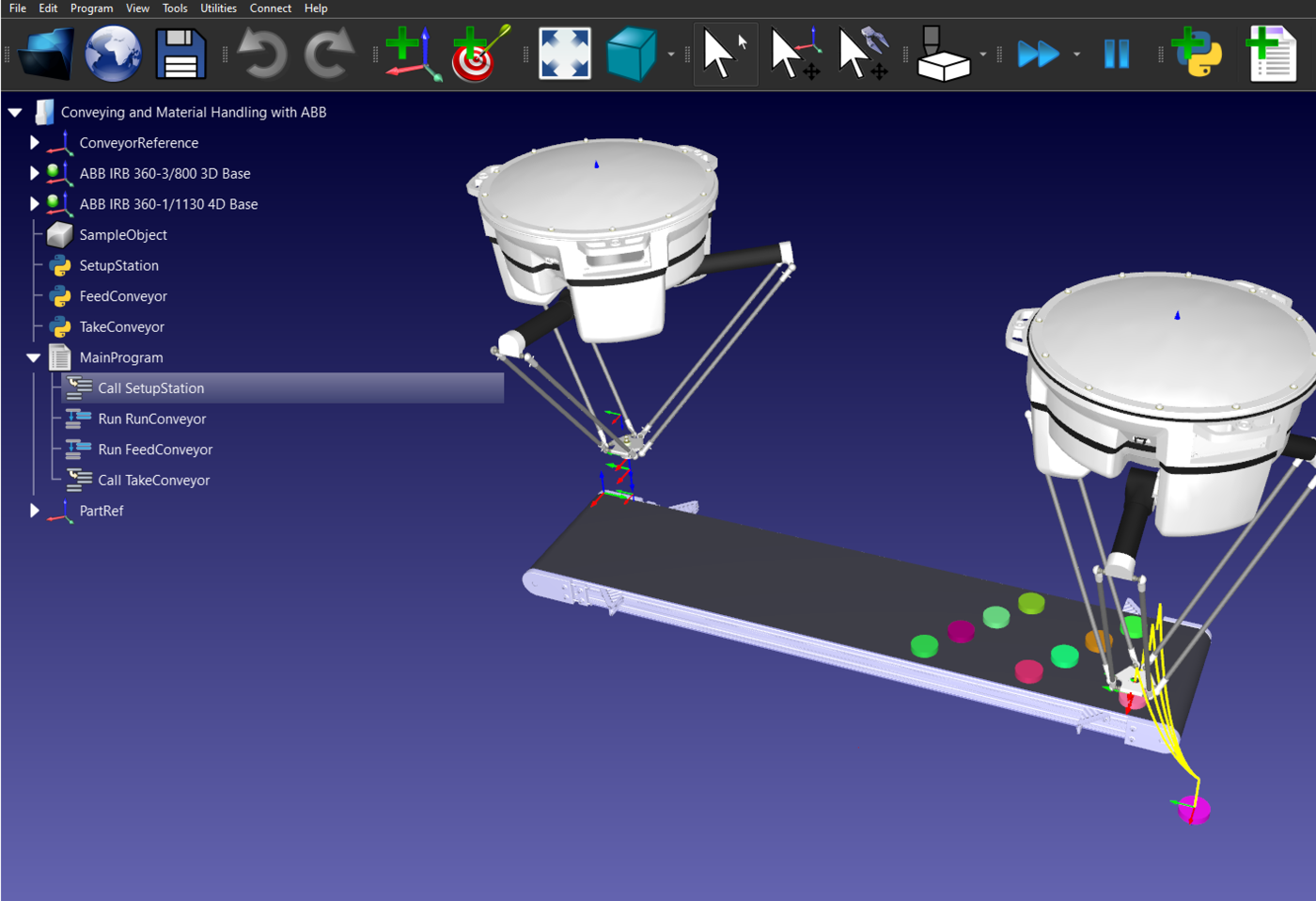
Se você precisar de operações mais avançadas de Pick and Place, como a coleta de grandes conjuntos ou a coleta de objetos em uma esteira em movimento, poderá usar a API para programar suas aplicações de Pick and Place.
Este exemplo usa a API do RoboDK com Python para pegar e colocar objetos em um transportador em movimento. Você pode baixá-lo de nossa biblioteca.
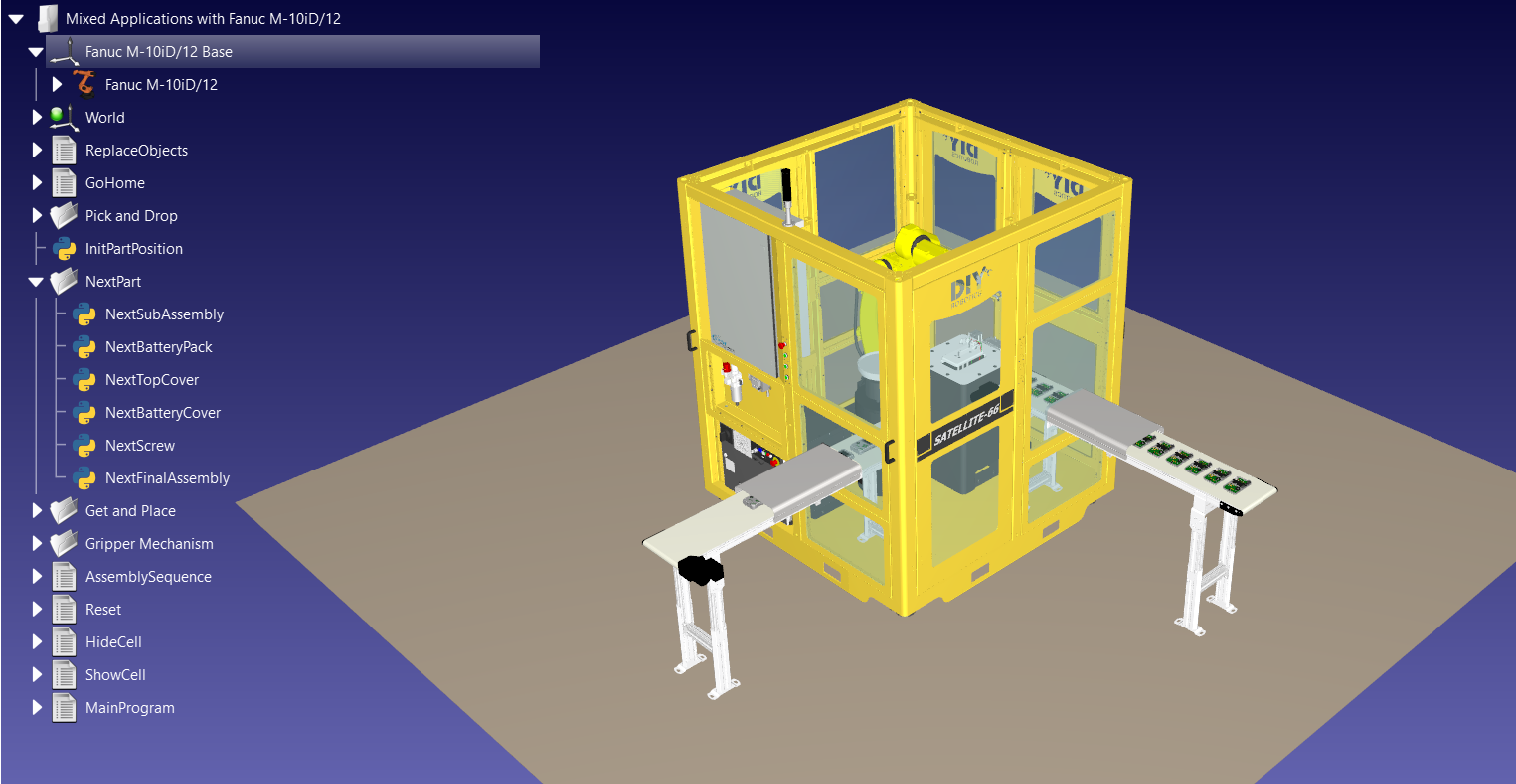
Você também pode dar uma olhada nesta estação de montagem que utiliza várias peças para criar uma montagem final, usando muitas operações de Pick and Place: Aplicações mistas com Fanuc M-10iD/12.