Criar Pontos para Pick and Place
Siga estas etapas para criar um Ponto básico no RoboDK para o aplicativo Pick and Place
7.Adicione pontos de Pick and Place:
a.Mova o robô para a posição de retirada desejada.
b.Selecione Programa → Criar Ponto para salvar a posição.
c.Repita o procedimento para as posições Pick, Retract Pick, Place e Retract Place.
8.Organizar as metas:
a.Renomeie os pontos para maior clareza (por exemplo, Approach_Pick, Pick, Place). Pressione F2 para renomear os Pontos.
b.Não se esqueça de criar os pontos nos frames de referência relevantes na árvore de estações.
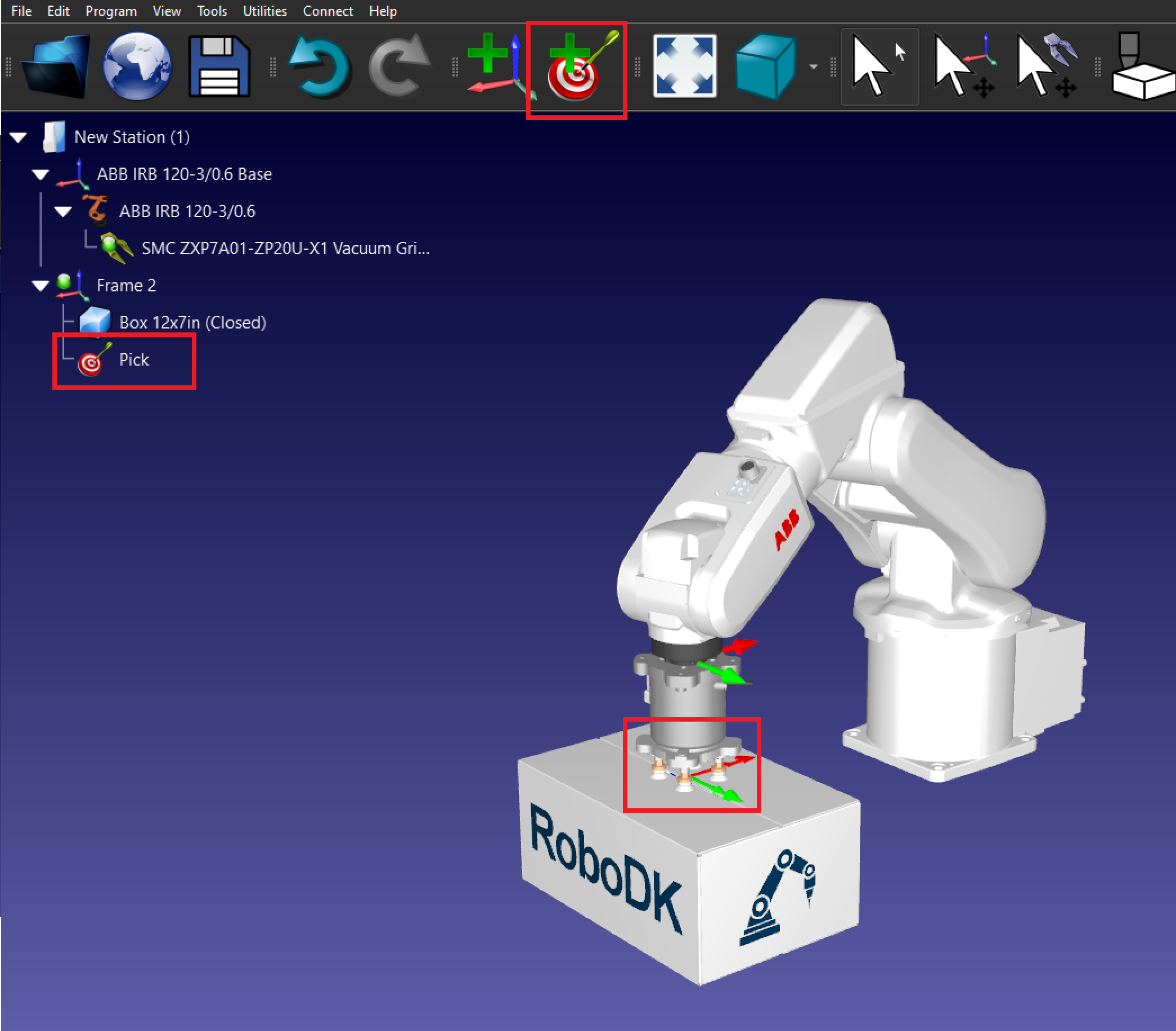
9.Crie o ponto Pick: Coloque o robô sobre a caixa e crie um ponto chamado Pick.
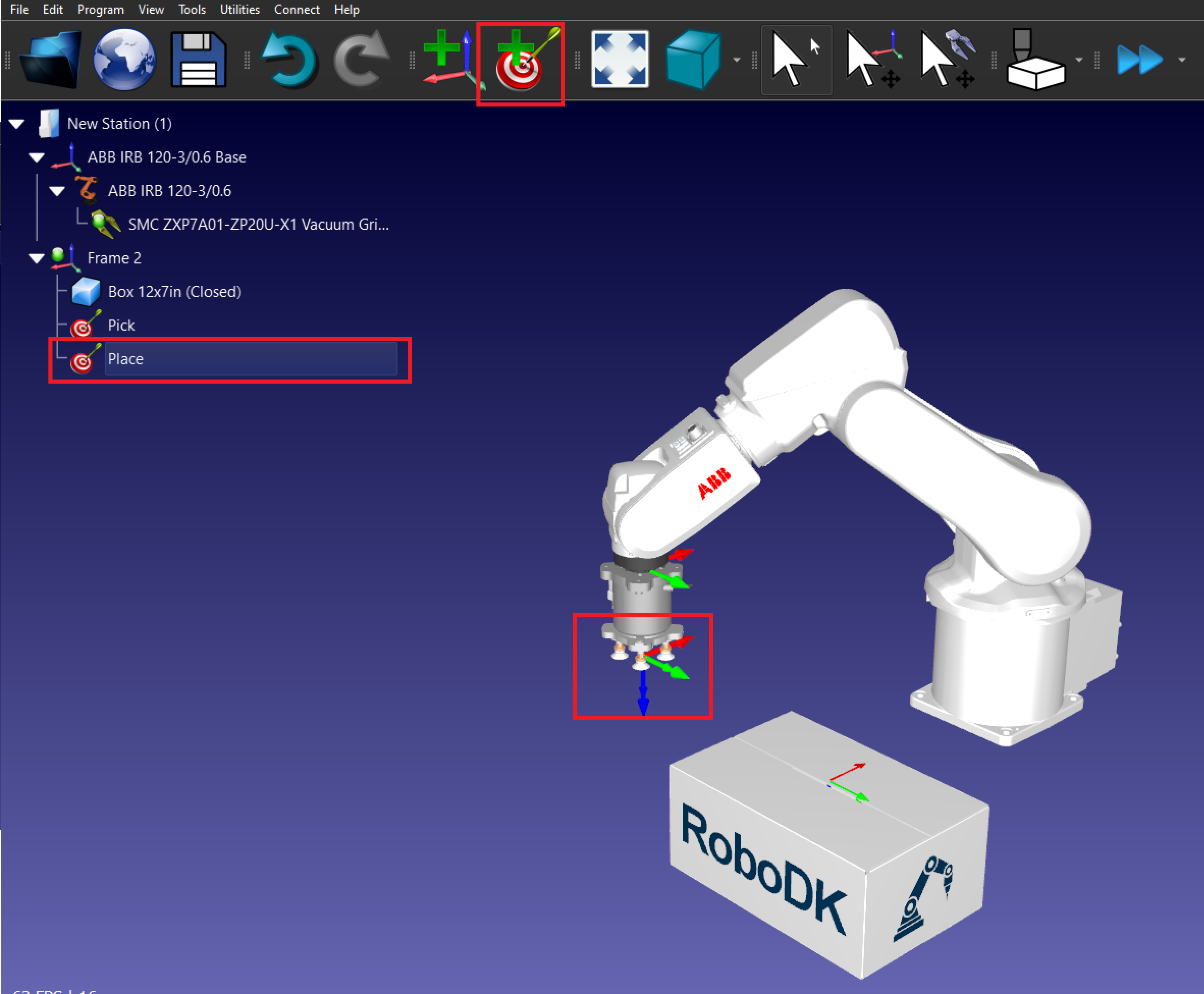
10.Crie o ponto Place: Mova o robô para onde você deseja colocar a caixa e crie um Ponto chamado Place.
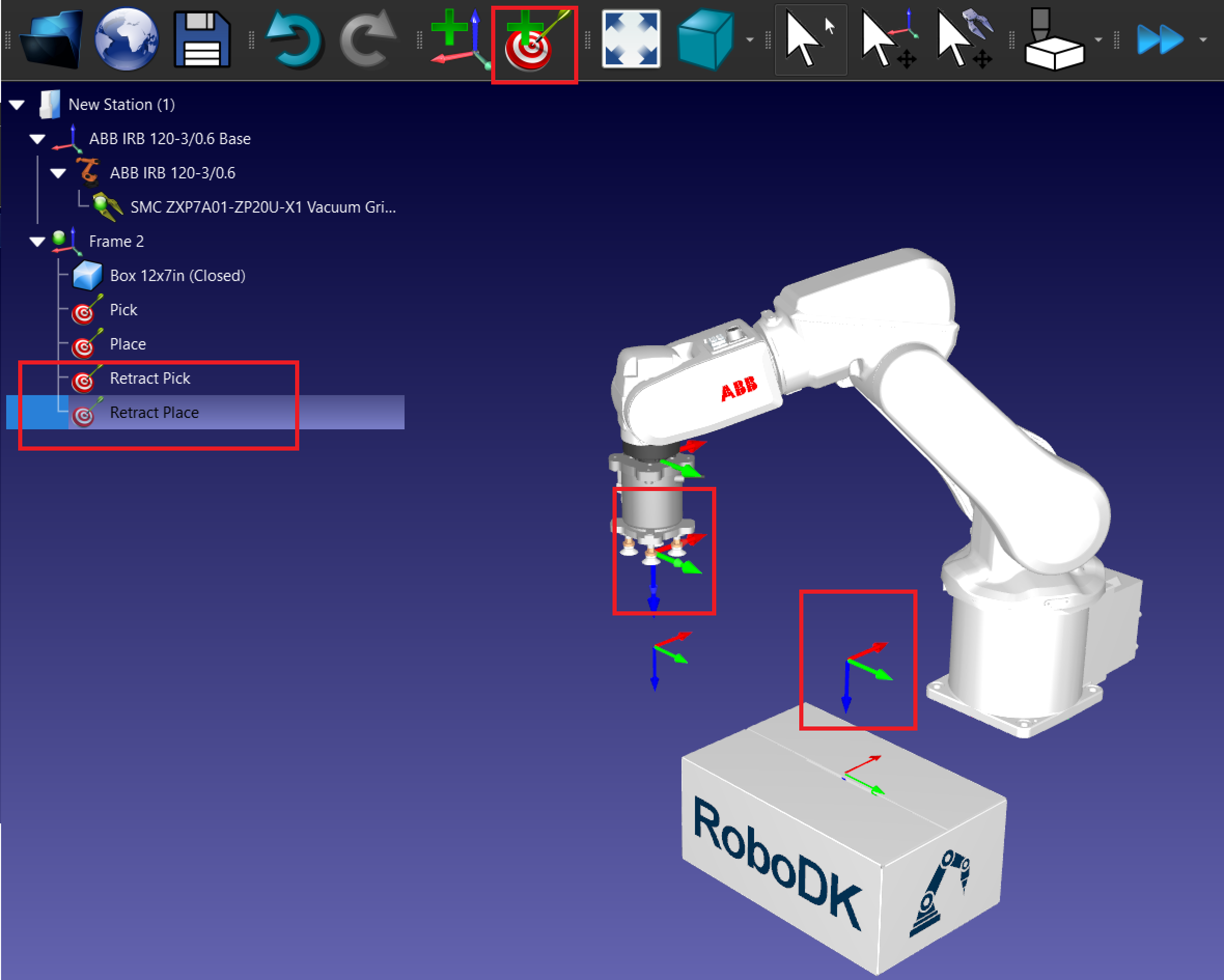
11.Crie os ontos Retract:
a.Mova o robô para o ponto Pick e para cima no eixo Z.
b.Crie um novo ponto chamado Pick Retract.
c.Repita o procedimento com o Ponto Place.