Criar programa de Pick and Place
Siga estas etapas para criar um programa básico de Pick and Place no RoboDK com um robô de 6 eixos usando uma garra a vácuo para mover uma caixa.
1.Programar a operação de Pick and Place:
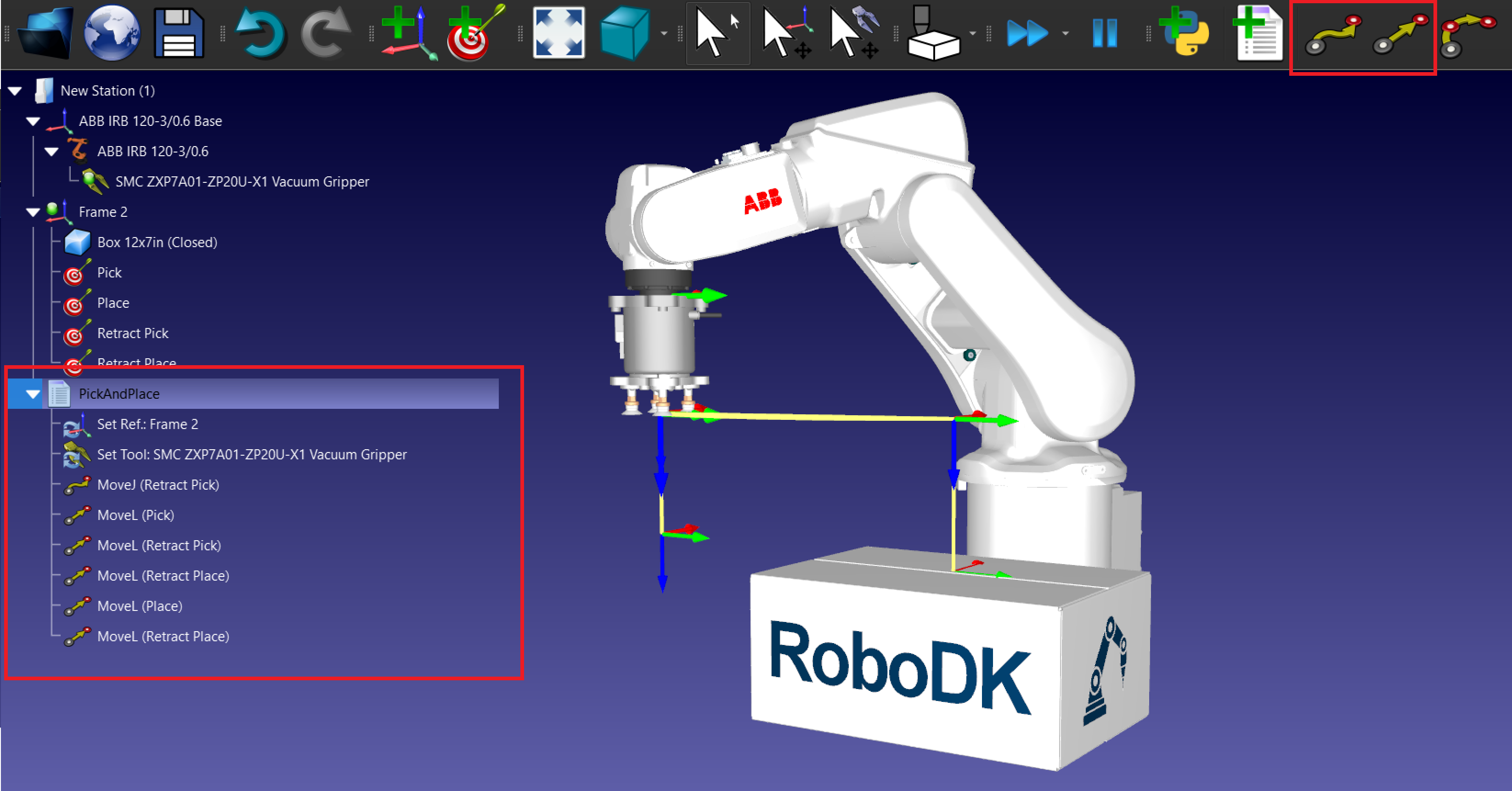
a.Crie um novo programa: Vá até Programa → Adicionar Programa e dê a ele o nome de PickAndPlace.
b.Add-in Instruções de movimento:
i.Adicione instruções MoveJ ou MoveL para cada ponto.
ii.Mova o robô para o ponto de retração primeiro e, em seguida, crie um MoveL para o ponto Pick e volte para a retração.
iii.Repita o procedimento com o ponto Place.
2.Adicione um evento para selecionar e posicionar o objeto.
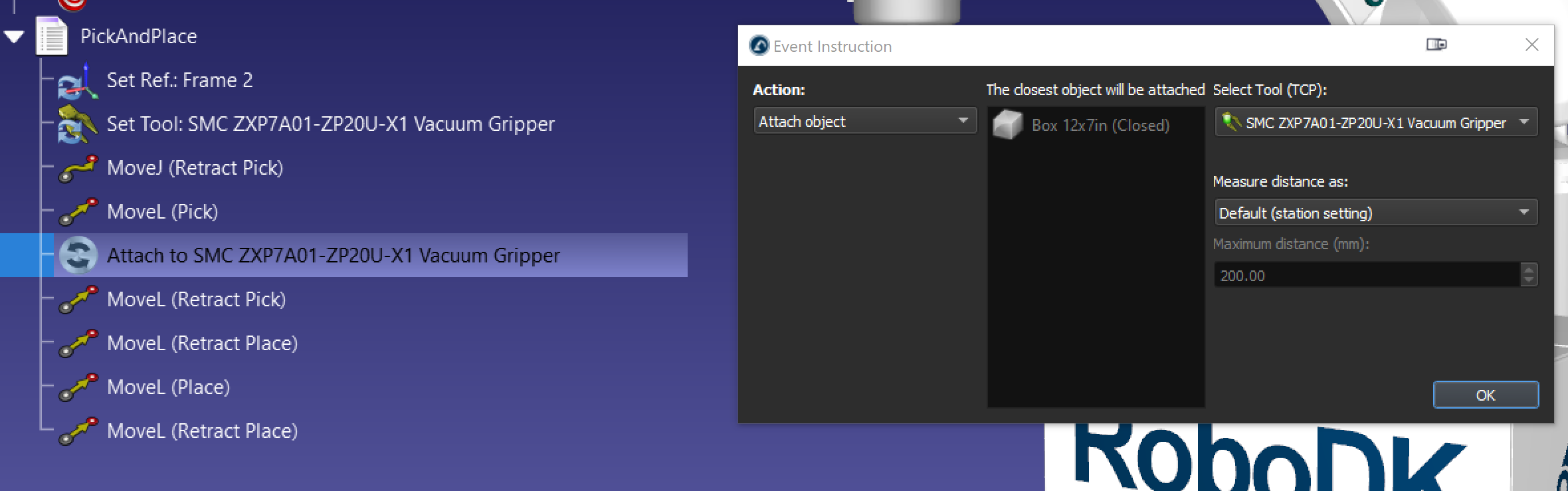
a.Para adicionar um evento, vá para Programa → Instrução de Simulação de Evento.
b.Adicione um evento com a ação Anexar objeto para pegar a caixa após o MoveL (Pick).
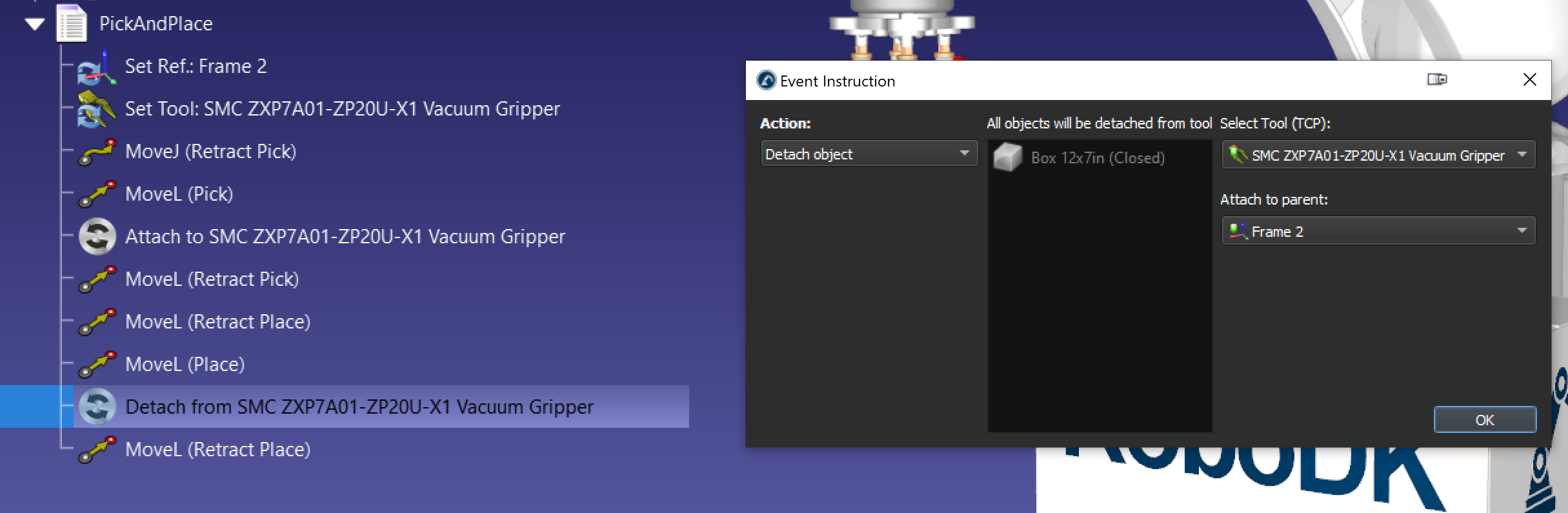
c.Adicione um evento com a ação Desanexar objeto para colocar a caixa após o MoveL (Place). A opção Anexar ao pai permite anexar o objeto a um novo objeto depois que ele for desconectado da garra.
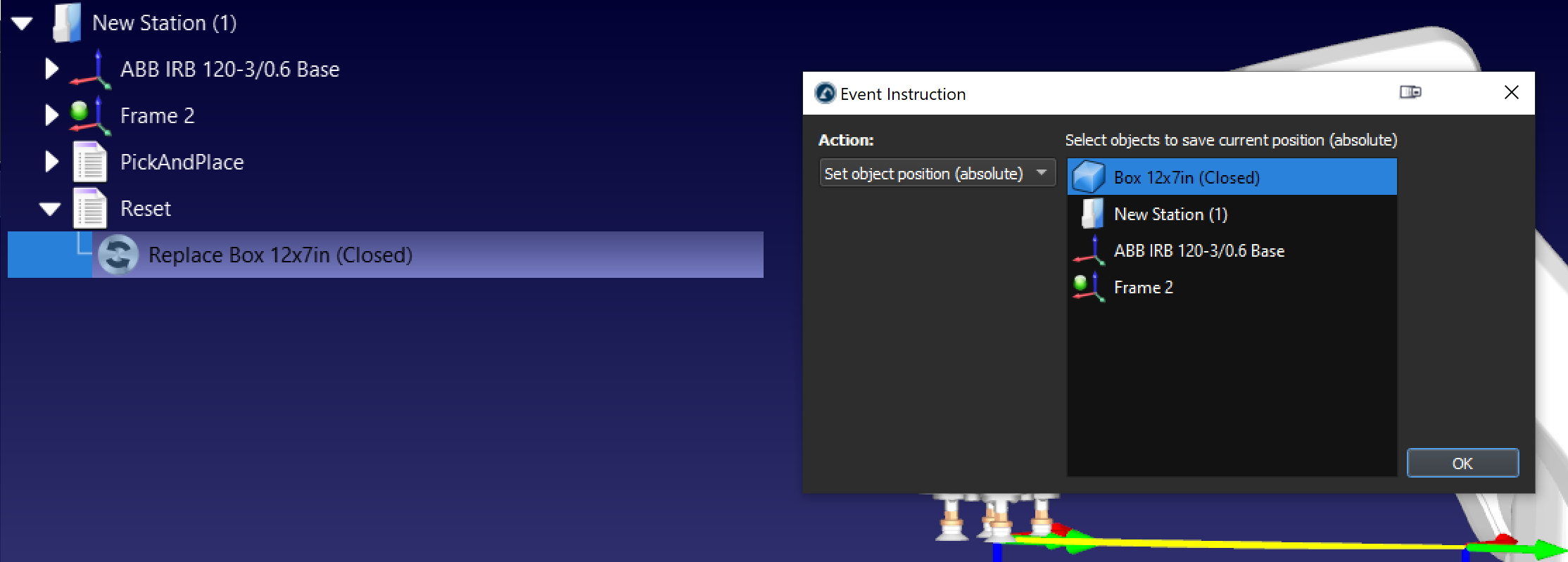
d.É uma boa prática criar também um programa separado com uma ação de evento Definir posição do objeto para redefinir a caixa para sua posição original, se necessário.
Seguindo essas etapas, você pode criar com sucesso uma estação básica de Pick and Place no RoboDK.