Crie um novo projeto RoboDK
Estas etapas mostrarão a você como criar um novo projeto (também conhecido como estação) no RoboDK para uma aplicação de Pick and Place.
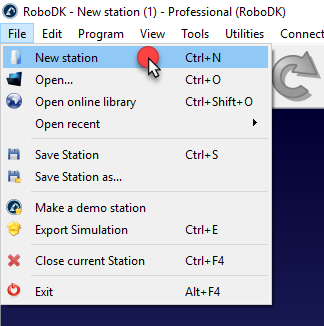
1.Abrir o RoboDK: Inicie o aplicativo RoboDK em seu computador.
2.Crie uma nova estação: Selecione Arquivo – Nova Estação no menu principal do RoboDK - uma nova estação vazia será criada como seu espaço de trabalho.
3.Adicione um robô da biblioteca
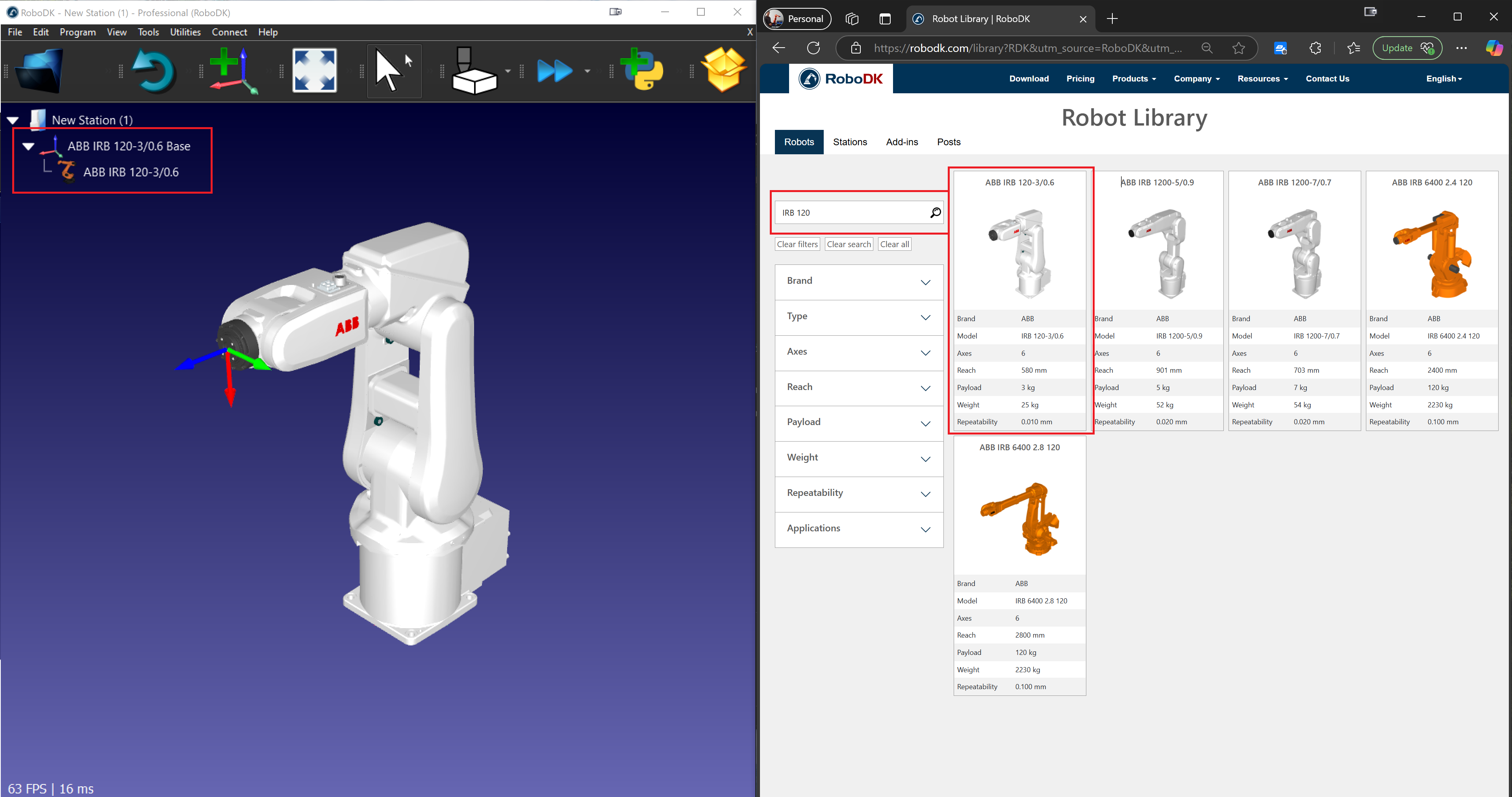
a.Abra a biblioteca on-line de robôs para fazer o download de um robô
i.No menu principal, selecione Arquivo → Abrir biblioteca on-line.
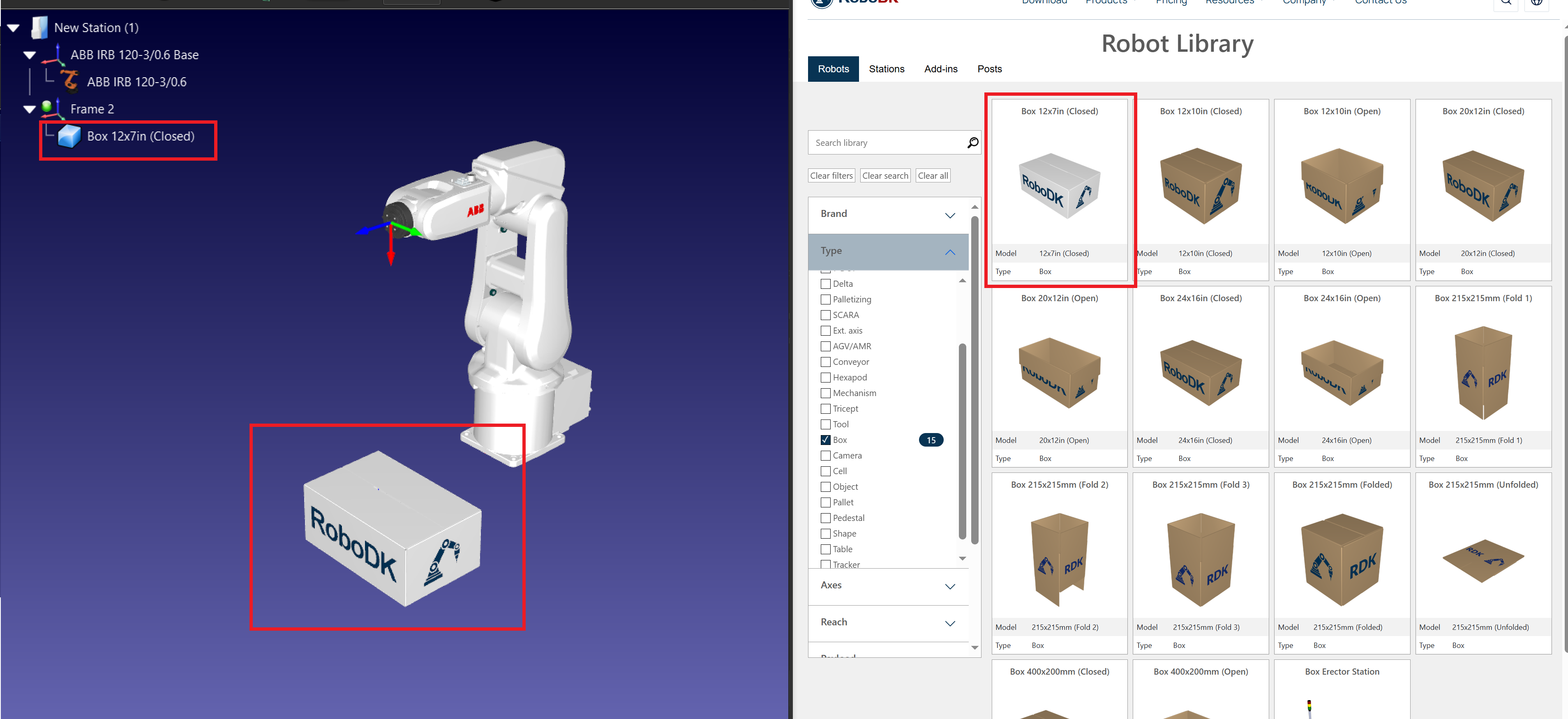
ii.A janela da biblioteca do RoboDK será aberta, exibindo uma variedade de robôs industriais.
b.Selecionar e importar um robô:
i.Use a barra de pesquisa para encontrar um robô adequado para tarefas de Pick and Place (por exemplo, UR10, ABB IRB 120, Fanuc LR Mate).
ii.Clique no robô desejado e selecione Download.
c.Posicione o robô na estação:
i.O robô aparecerá automaticamente na estação.
ii.Use a ferramenta Mover para ajustar o posicionamento, se necessário.
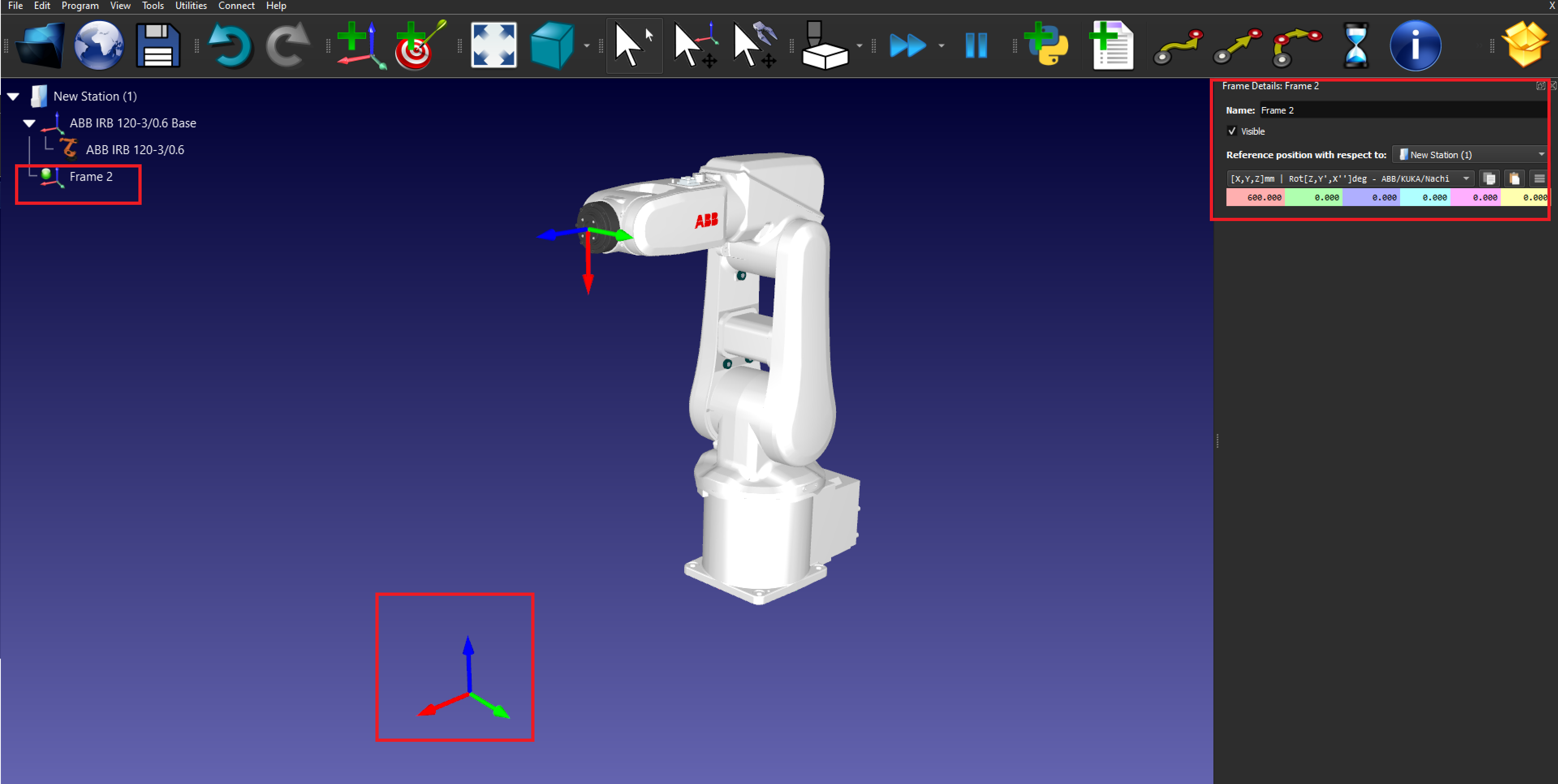
4.Adicione um frame de referência
a.Criar um frame de referência:
i.Vá até Programa → Adicionar Frame de Referência.
ii.Um novo frame de referência aparecerá na árvore de estações e na visualização 3D.
b.Posicione o frame de referência:
i.Clique duas vezes no frame de referência para inserir as coordenadas (X, Y, Z) e os valores de rotação.
ii.Clique em OK para salvar a posição.
5.Importar objetos 3D
a.Carregar modelos de objetos:
iii.No menu principal, selecione Arquivo → Abrir.
iv.Procure e selecione os modelos 3D dos objetos a serem coletados e posicionados (por exemplo, arquivos STEP, IGES).
b.Posicione os objetos:
v.Use a ferramenta Mover para ajustar o posicionamento do objeto no frame de referência.
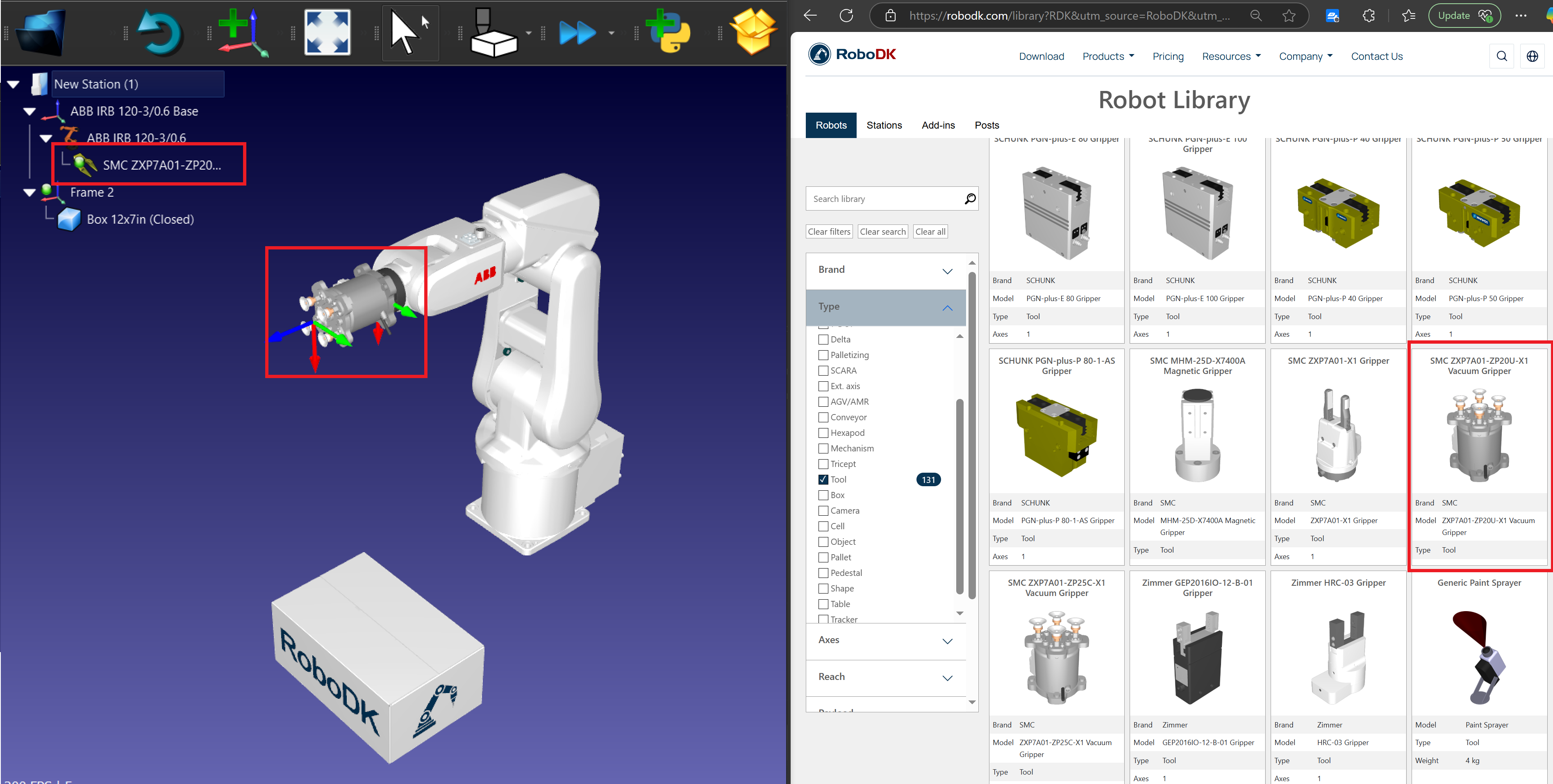
6.Adicione uma Ferramenta (Garra)
a.Selecione uma garra:
i.No menu principal, vá para Utilitários → Adicionar Ferramenta (TCP).
ii.Escolha uma garra da Biblioteca do Robô ou importe um arquivo de garra personalizado.
b.Fixe a ferramenta no robô:
i.Clique com o botão direito do mouse na garra na árvore de estações e selecione Anexar ao robô.
ii.Escolha o flange do robô.
c.Defina o TCP (ponto central da ferramenta): Clique duas vezes na ferramenta e insira as coordenadas do TCP em relação ao flange do robô.