Pick and Place usando a API
Se você precisar de operações mais avançadas de Pick and Place, como a coleta de grandes conjuntos ou a coleta de objetos em uma esteira em movimento, poderá usar a API para programar suas aplicações de Pick and Place.
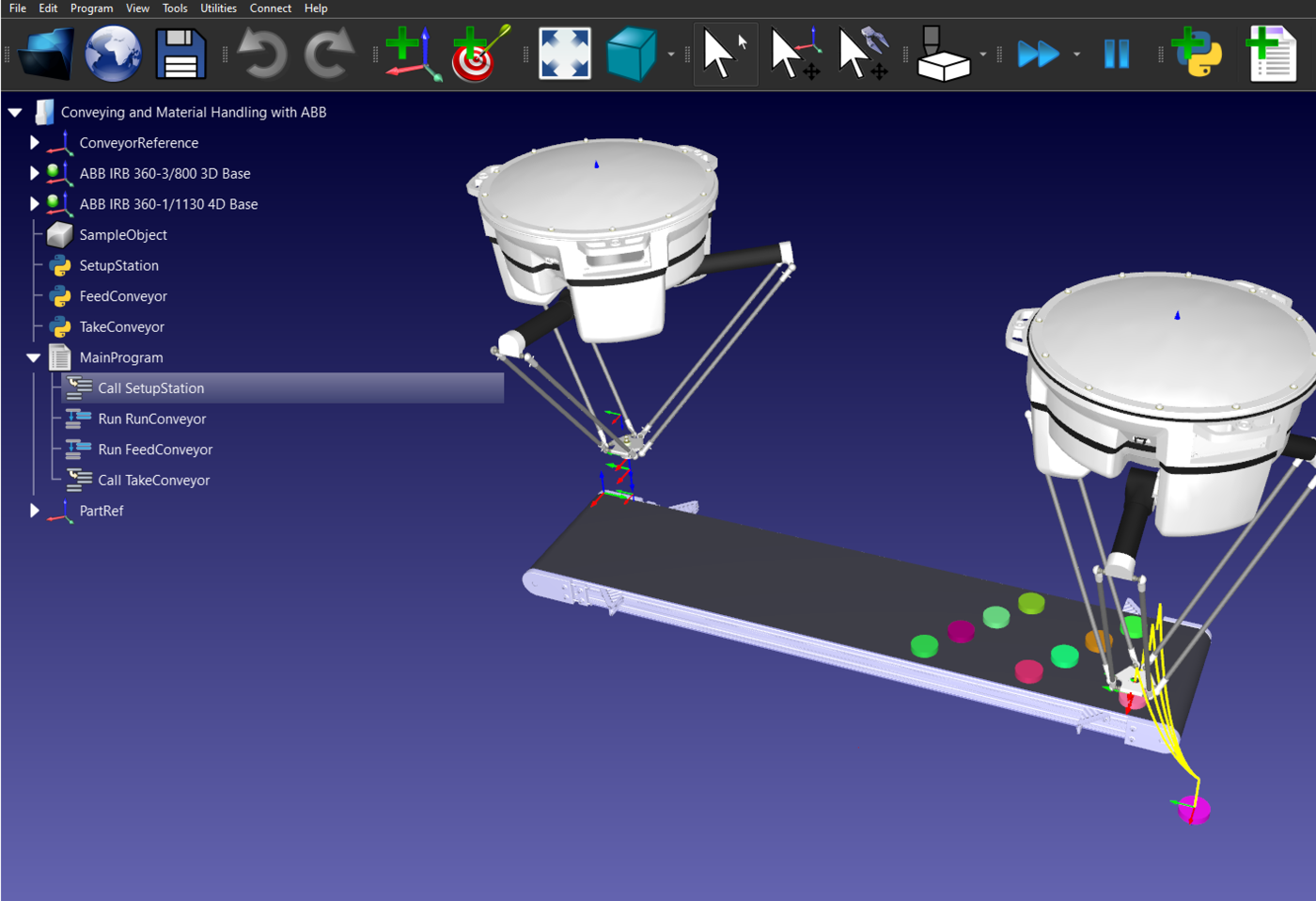
Este exemplo usa a API do RoboDK com Python para pegar e colocar objetos em um transportador em movimento. Você pode baixá-lo de nossa biblioteca.
Dica: Você pode encontrar mais informações sobre a API do RoboDK aqui.
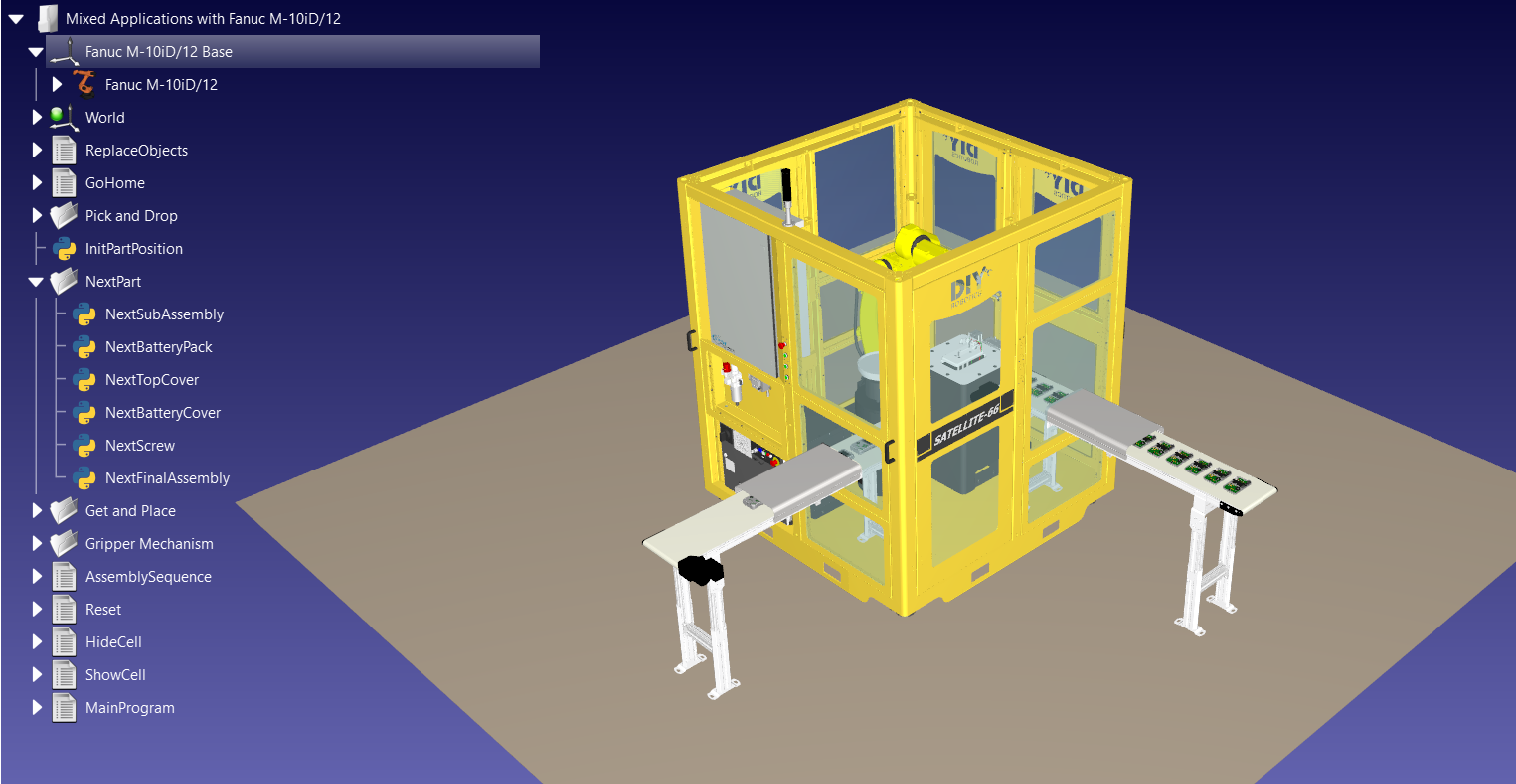
Você também pode dar uma olhada nesta estação de montagem que utiliza várias peças para criar uma montagem final, usando muitas operações de Pick and Place: Aplicações mistas com Fanuc M-10iD/12.