Esboço 2D do Fusion 360
Abra seu objeto no Fusion 360. Neste exemplo, o objeto é uma peça de plástico. O objetivo deste projeto é remover o excesso de material nos três orifícios e ao redor da peça perto da parte inferior.
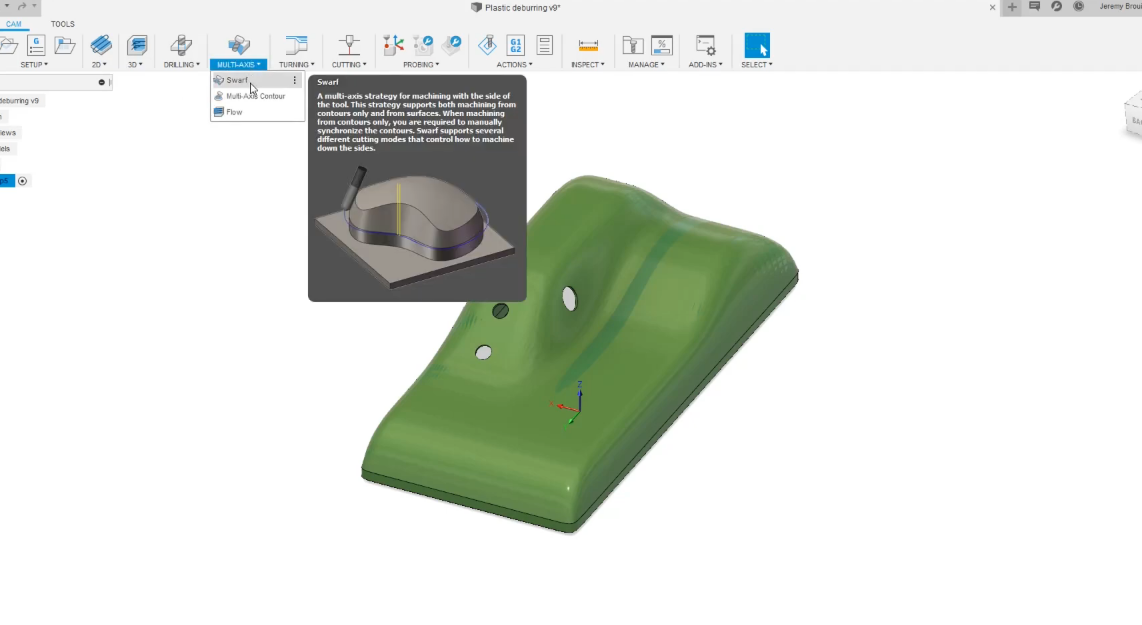
Primeiro, você precisa se certificar de que está na guia "Manufacturing" do espaço de trabalho do Fusion. Devemos seguir estas etapas para criar a trajetória da ferramenta:
1.Selecione Multi-Axis e, em seguida, selecione a ferramenta Swarf.
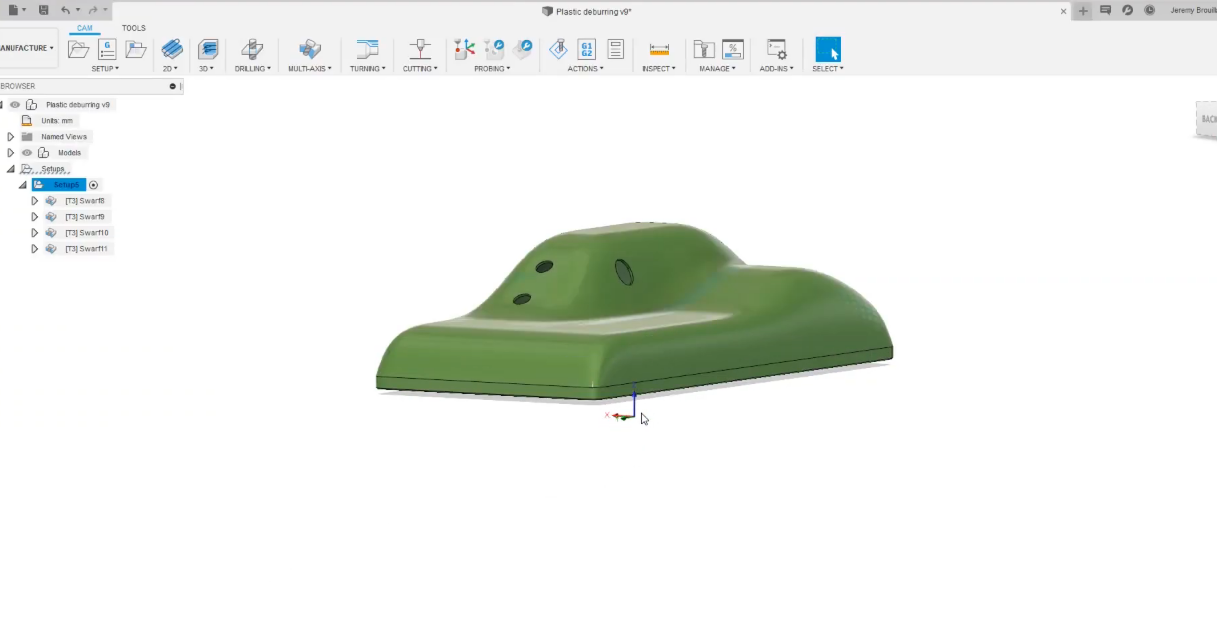
2.Selecione a ferramenta que deseja usar (neste exemplo, usaremos uma ferramenta personalizada da nossa estação RoboDK) e, em seguida, selecione o furo para criar a primeira trajetória.
3.Para obter a trajetória da ferramenta no lado direito da superfície, selecionaremos Machine Other Side e, em seguida, Ok. Siga esse procedimento para cada furo.
4.Para fazer a mesma coisa com a parte inferior, você selecionará a ferramenta Swarf e, em seguida, selecionará a parte inferior.
5.Quando o cálculo estiver concluído, vamos simular os caminhos que acabamos de criar: Selecione sua configuração e, em seguida, selecione Simulate (Simular).
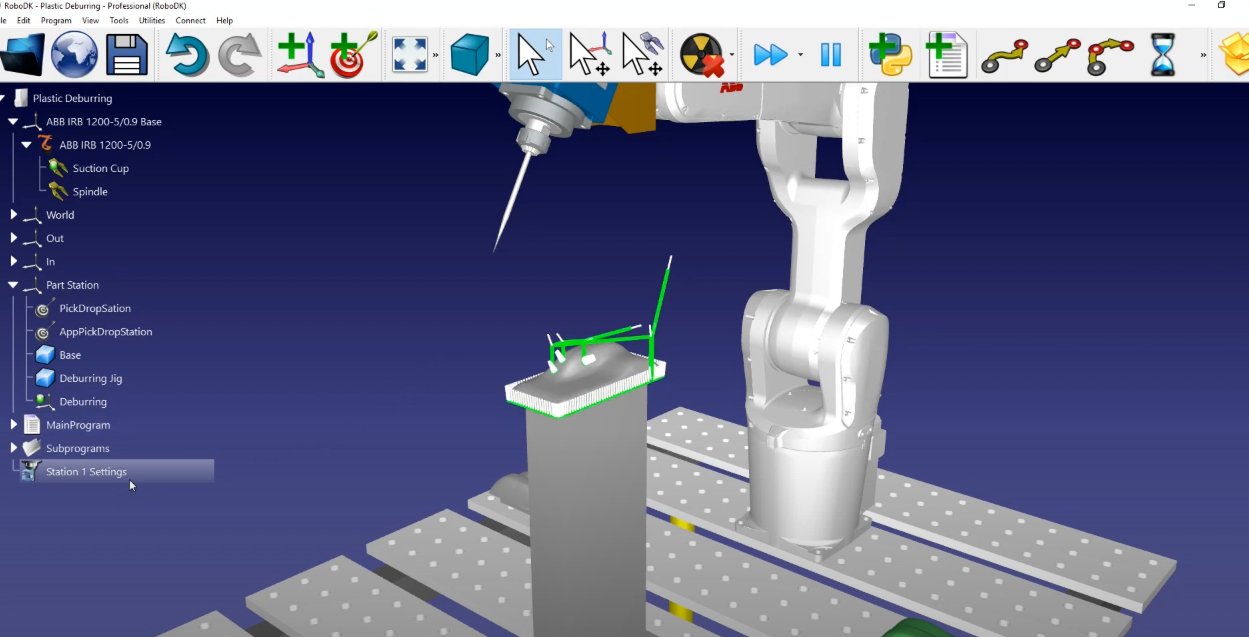
Você terá um caminho de ferramenta completo para o seu robô. Precisamos voltar ao RoboDK para garantir que o frame de referência "Deburring" esteja ativado. Para fazer isso, devemos:
Entrar no RoboDK: selecionar Deburring e, em seguida, selecione Ativar Frame de Referência.
Agora que o frame de referência Deburring está ativado, o programa será exportado com relação a esse frame de referência:
Siga estas etapas para carregar seu esboço no RoboDK:
1.No Fusion 360, você tem o plug-in RoboDK. Basta selecionar Carregar projeto CAM no RoboDK
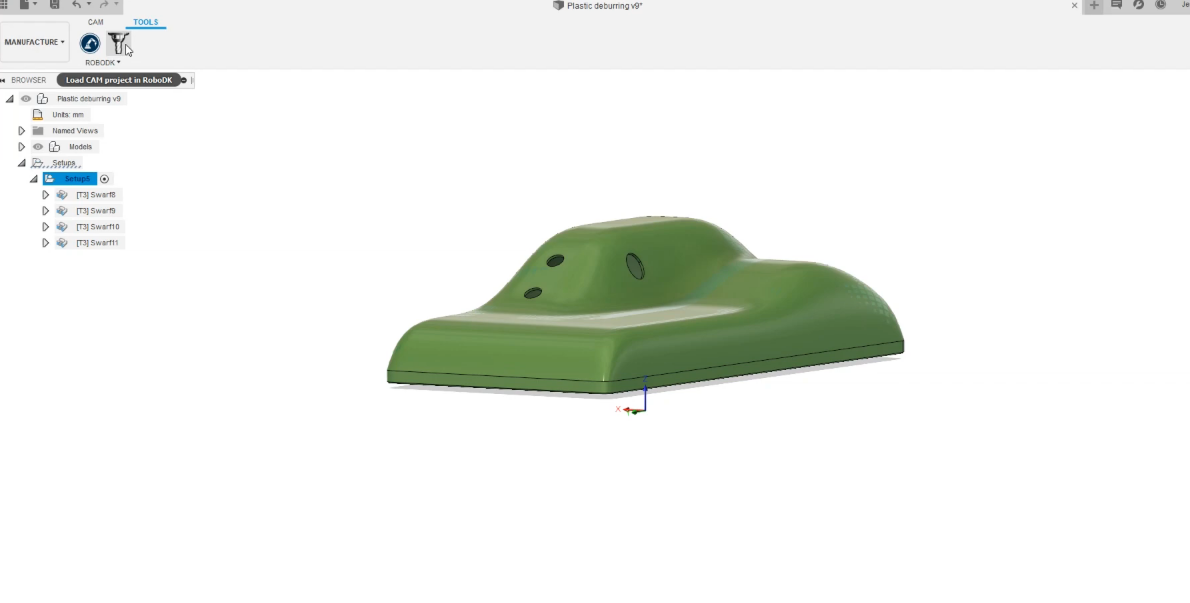
2.Se voltarmos ao RoboDK, poderemos encontrar a trajetória de corte em seu lugar. Foi criado um "Projeto de Usinagem" chamado "Plastic Deburring": Selecione Deburring e, em seguida, selecione Visível.
3.Podemos renomear a trajetória da ferramenta de corte para "Station1 Settings": Clique com o botão direito do mouse em Plastic Deburring para renomeá-la.