Estação RoboDK
Quando tivermos a trajetória da ferramenta do robô pronta no RoboDK, devemos nos certificar de que a célula do robô virtual corresponde à configuração real. No RoboDK, certificamo-nos de que estamos usando a ferramenta e o frame de referência corretas para a operação de manufatura antes de gerarmos o programa do robô.
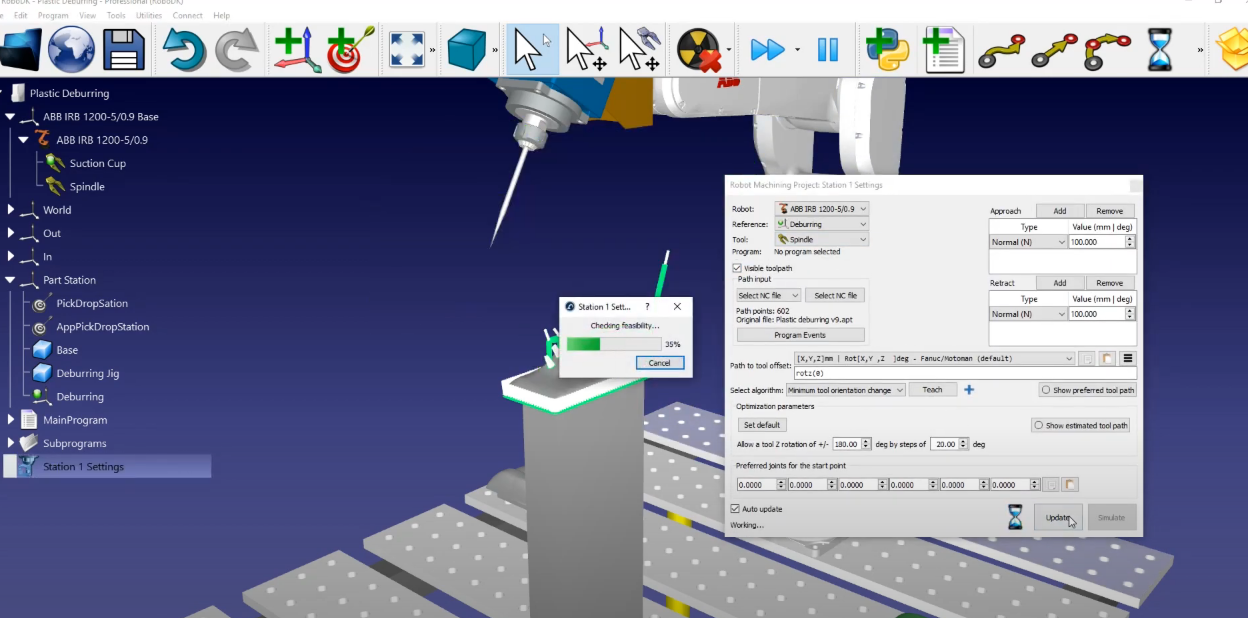
Neste exemplo, selecionamos a referência Deburring e a ferramenta como Spindle. Selecione Atualizar ➔ Simular.
Se quiser reordenar ou mudar o sentido de uma seção de caminho, siga estas etapas:
1.Os projetos CAM geralmente já vêm com seus movimentos de aproximação e retração, portanto, podemos remover os nossos: Basta ir até "Aproximação" e "Retração" e selecionar Remover. Selecione Atualizar e, em seguida, Simular.
2.Neste exemplo, os parâmetros padrão produzem um resultado válido. A única configuração adicional que talvez queiramos alterar é a ativação e desativação do fuso: Abra Eventos de Prograam ➔ Adicione uma sub-rotina em " Path Approach " e "Path Retract", cada opção e escrevendo "Spindle (1)" em Path Approach e "Spindle (0)" em Path Retract. Isso pressupõe que você tenha uma função definida no controlador que possa aceitar um parâmetro para ativar ou desativar o fuso.
3.Selecione Atualizar.
Agora, devemos modificar o nome do programa que criamos "Station 1" e iniciar o "Main Program"
A última coisa que precisamos fazer é gerar o programa do robô. Como estamos usando um robô ABB, precisaremos exportar um arquivo mod para o controlador do robô ABB que usa a linguagem de programação RAPID proprietária da ABB.
1.Certifique-se de que estamos usando o pós-processador correto: Selecione a estação➔ Selecione o pós-processador➔ ABB RAPID IRC 5.
2.Clique com o botão direito do mouse no programa Station1 e selecione Gerar Programa de Robô.
O novo programa de robô será aberto automaticamente em um editor de texto. Você poderá ver todos os comandos de movimento específicos e a sintaxe exigida pelo controlador do robô ABB.