Deburring
Introdução
A rebarbação robótica de plástico consiste em um robô que remove o excesso de material de peças moldadas de plástico. Este exemplo ajudará você a criar um projeto no RoboDK para simulação de robô e programação off-line. Esse exemplo também mostra como você pode usar o plug-in do Fusion 360 para gerar caminhos de ferramentas no RoboDK.
Com o plug-in do RoboDK para o Fusion 360, você pode criar facilmente um projeto de usinagem e exportar automaticamente a trajetória gerada para o RoboDK. O RoboDK o transformará em um programa de robô. Você pode carregar facilmente modelos 3D criados no SolidWorks para o RoboDK. O Add-in do RoboDK permite que você programe qualquer robô diretamente do Fusion 360 para qualquer aplicação de fabricação.
Exemplo de rebarbação de plástico
Para iniciar o projeto, primeiro você terá de selecionar o exemplo de rebarbação de plástico do RoboDK na biblioteca padrão.
Configuração
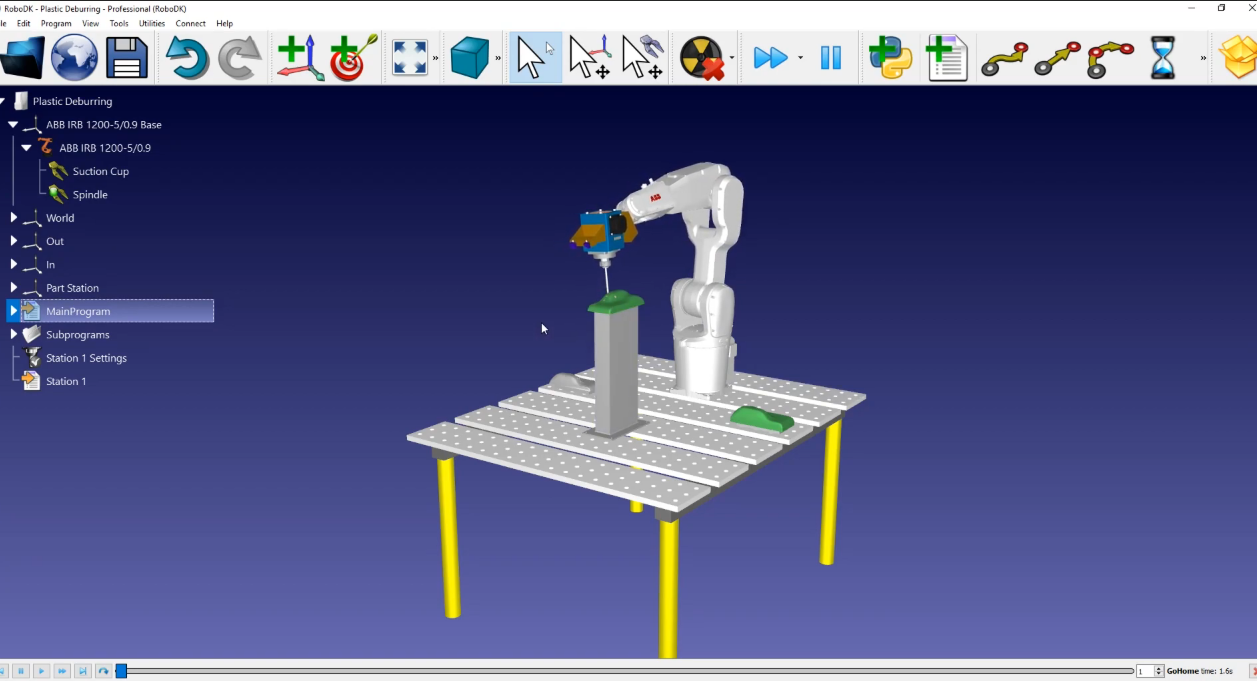
Este exemplo usa uma configuração simples: Um robô montado em uma mesa (este exemplo inclui um robô da ABB), uma pilha para a peça recém-moldada, uma pilha para a peça processada e o gabarito no meio para manter a peça no lugar
Carregue a estação:
1.Selecione Arquivo ➔
2.Localize o exemplo Plastic Deburring na seção de exemplos do RoboDK:
C:/RoboDK/Examples/Plugin-Fusion360-Plastic-Deburring.rdk.
Agora que você carregou a estação, pode abrir o Fusion 360.
Esboço 2D do Fusion 360
Abra seu objeto no Fusion 360. Neste exemplo, o objeto é uma peça de plástico. O objetivo deste projeto é remover o excesso de material nos três orifícios e ao redor da peça perto da parte inferior.
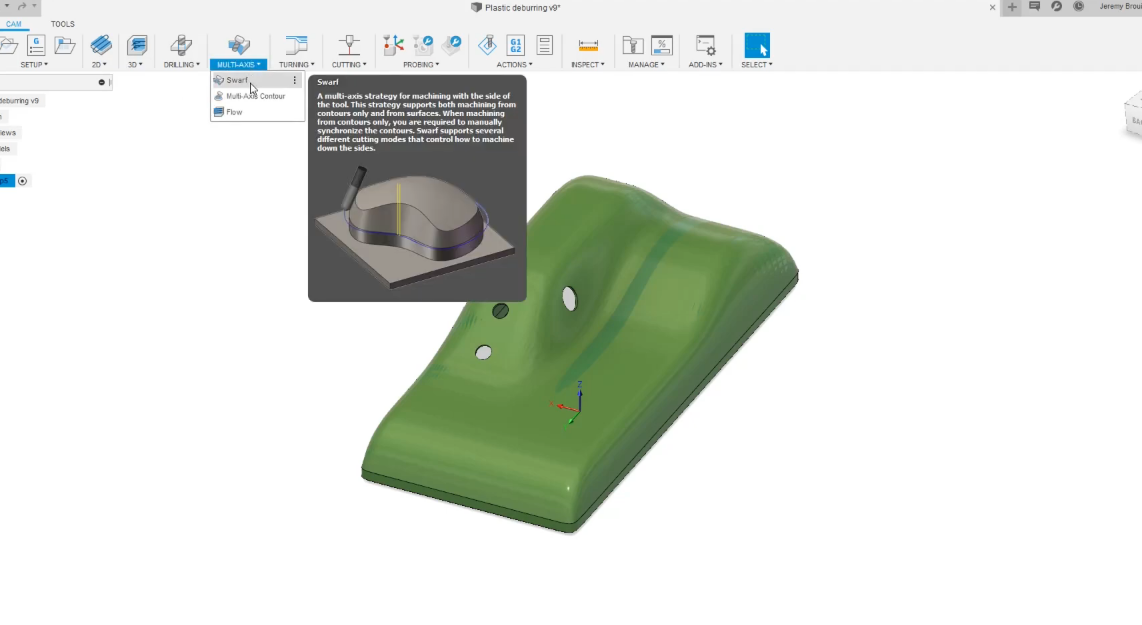
Primeiro, você precisa se certificar de que está na guia "Manufacturing" do espaço de trabalho do Fusion. Devemos seguir estas etapas para criar a trajetória da ferramenta:
1.Selecione Multi-Axis e, em seguida, selecione a ferramenta Swarf.
2.Selecione a ferramenta que deseja usar (neste exemplo, usaremos uma ferramenta personalizada da nossa estação RoboDK) e, em seguida, selecione o furo para criar a primeira trajetória.
3.Para obter a trajetória da ferramenta no lado direito da superfície, selecionaremos Machine Other Side e, em seguida, Ok. Siga esse procedimento para cada furo.
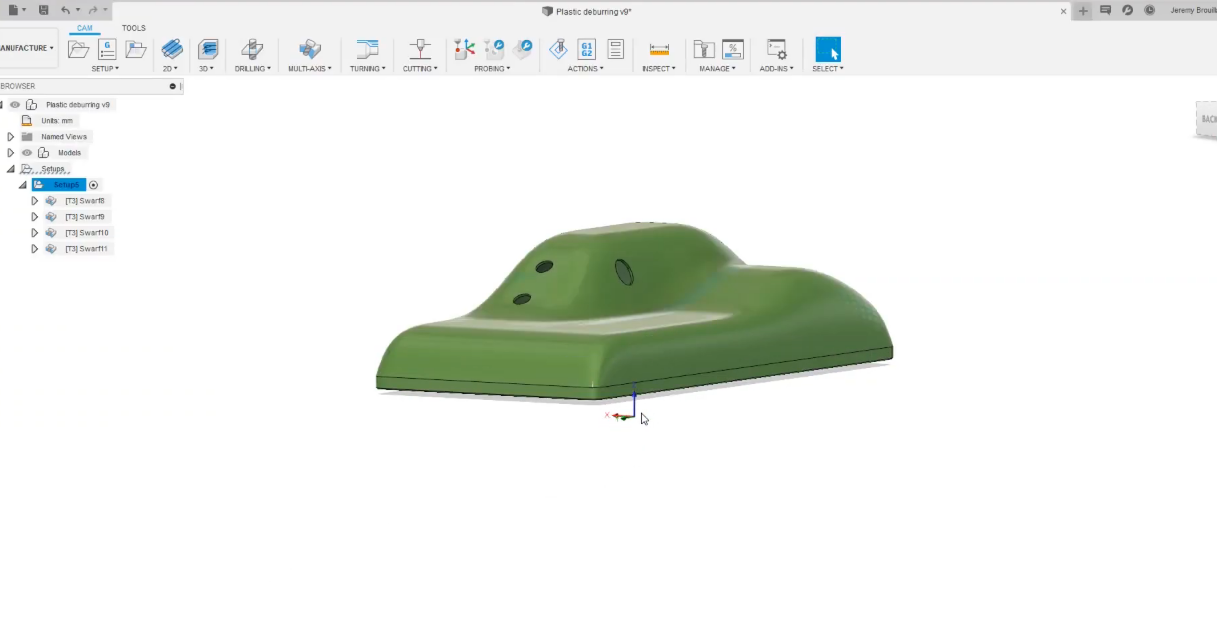
4.Para fazer a mesma coisa com a parte inferior, você selecionará a ferramenta Swarf e, em seguida, selecionará a parte inferior.
5.Quando o cálculo estiver concluído, vamos simular os caminhos que acabamos de criar: Selecione sua configuração e, em seguida, selecione Simulate (Simular).
Você terá um caminho de ferramenta completo para o seu robô. Precisamos voltar ao RoboDK para garantir que o frame de referência "Deburring" esteja ativado. Para fazer isso, devemos:
Entrar no RoboDK: selecionar Deburring e, em seguida, selecione Ativar Frame de Referência.
Agora que o frame de referência Deburring está ativado, o programa será exportado com relação a esse frame de referência:
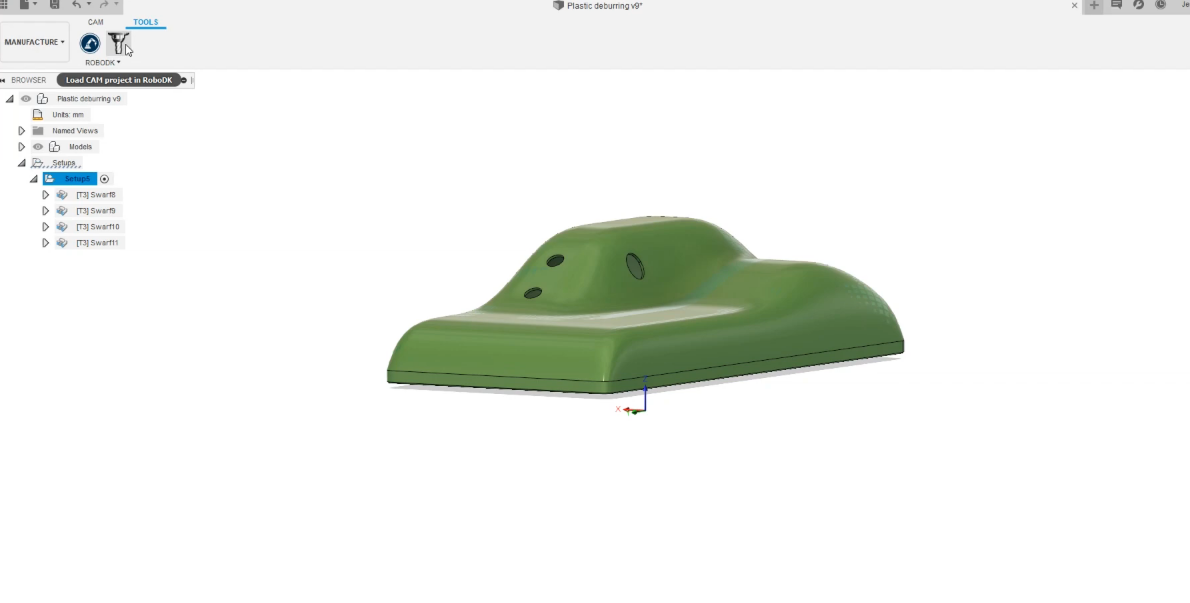
Siga estas etapas para carregar seu esboço no RoboDK:
1.No Fusion 360, você tem o plug-in RoboDK. Basta selecionar Carregar projeto CAM no RoboDK
2.Se voltarmos ao RoboDK, poderemos encontrar a trajetória de corte em seu lugar. Foi criado um "Projeto de Usinagem" chamado "Plastic Deburring": Selecione Deburring e, em seguida, selecione Visível.
3.Podemos renomear a trajetória da ferramenta de corte para "Station1 Settings": Clique com o botão direito do mouse em Plastic Deburring para renomeá-la.
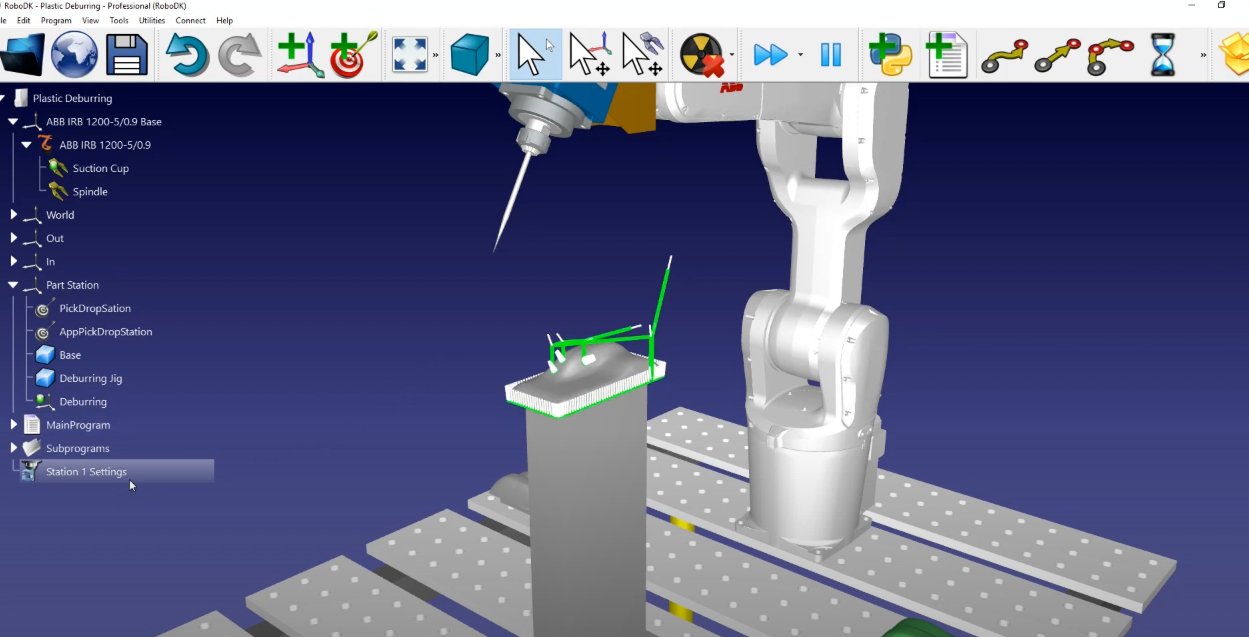
Estação RoboDK
Quando tivermos a trajetória da ferramenta do robô pronta no RoboDK, devemos nos certificar de que a célula do robô virtual corresponde à configuração real. No RoboDK, certificamo-nos de que estamos usando a ferramenta e o frame de referência corretas para a operação de manufatura antes de gerarmos o programa do robô.
Neste exemplo, selecionamos a referência Deburring e a ferramenta como Spindle. Selecione Atualizar ➔ Simular.
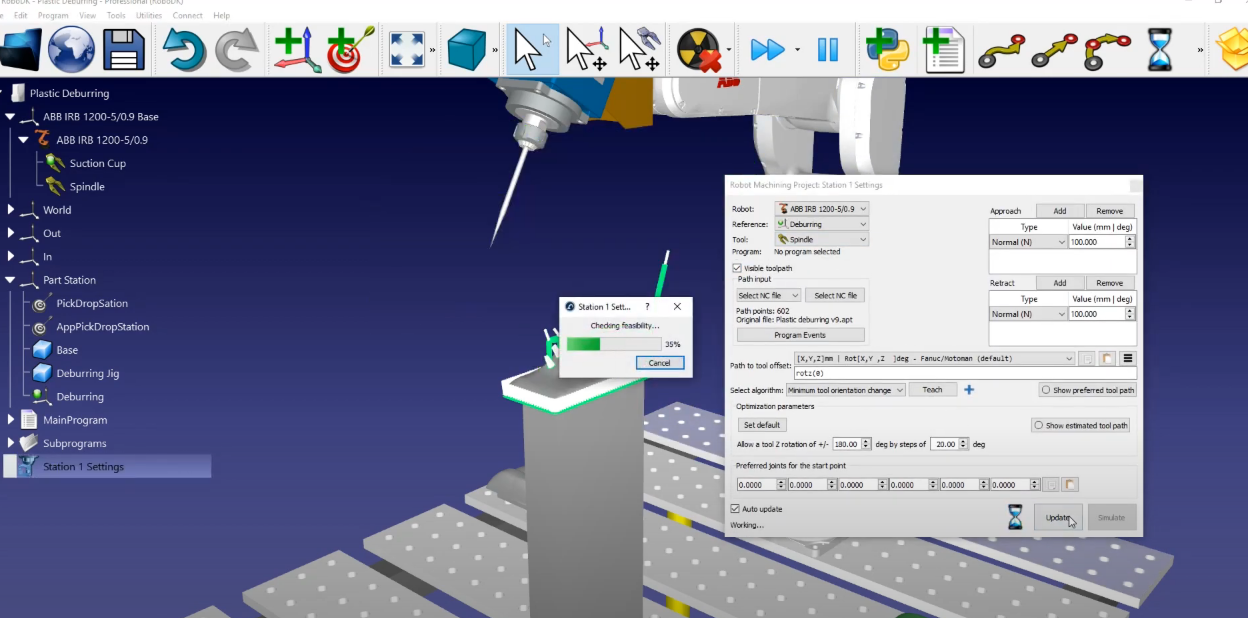
Se quiser reordenar ou mudar o sentido de uma seção de caminho, siga estas etapas:
1.Os projetos CAM geralmente já vêm com seus movimentos de aproximação e retração, portanto, podemos remover os nossos: Basta ir até "Aproximação" e "Retração" e selecionar Remover. Selecione Atualizar e, em seguida, Simular.
2.Neste exemplo, os parâmetros padrão produzem um resultado válido. A única configuração adicional que talvez queiramos alterar é a ativação e desativação do fuso: Abra Eventos de Prograam ➔ Adicione uma sub-rotina em " Path Approach " e "Path Retract", cada opção e escrevendo "Spindle (1)" em Path Approach e "Spindle (0)" em Path Retract. Isso pressupõe que você tenha uma função definida no controlador que possa aceitar um parâmetro para ativar ou desativar o fuso.
3.Selecione Atualizar.
Agora, devemos modificar o nome do programa que criamos "Station 1" e iniciar o "Main Program"
A última coisa que precisamos fazer é gerar o programa do robô. Como estamos usando um robô ABB, precisaremos exportar um arquivo mod para o controlador do robô ABB que usa a linguagem de programação RAPID proprietária da ABB.
1.Certifique-se de que estamos usando o pós-processador correto: Selecione a estação➔ Selecione o pós-processador➔ ABB RAPID IRC 5.
2.Clique com o botão direito do mouse no programa Station1 e selecione Gerar Programa de Robô.
O novo programa de robô será aberto automaticamente em um editor de texto. Você poderá ver todos os comandos de movimento específicos e a sintaxe exigida pelo controlador do robô ABB.