Esboço 3D do Inventor
Abra seu objeto 3D no Inventor. Neste exemplo, o objeto 3D é uma canoa com uma superfície externa curva que precisa ser polida.
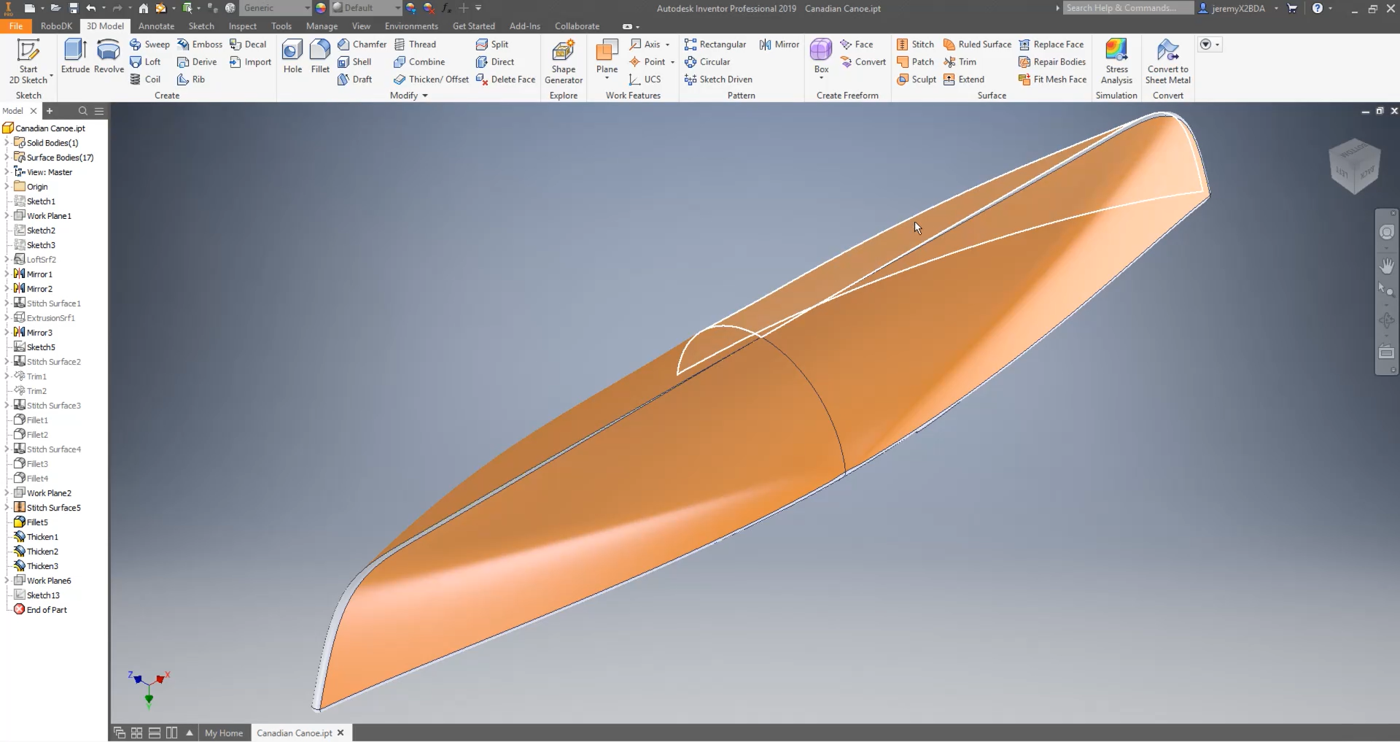
O objetivo deste projeto é criar e importar uma trajetória de polimento em uma superfície curva. O caminho será um movimento para cima e para baixo para polir a primeira seção da peça
Você terá que criar um plano em um ângulo de 45 graus para desenhar uma trajetória nesse plano e, em seguida, usar a ferramenta de projeção de curva para projetar o caminho na superfície curva.
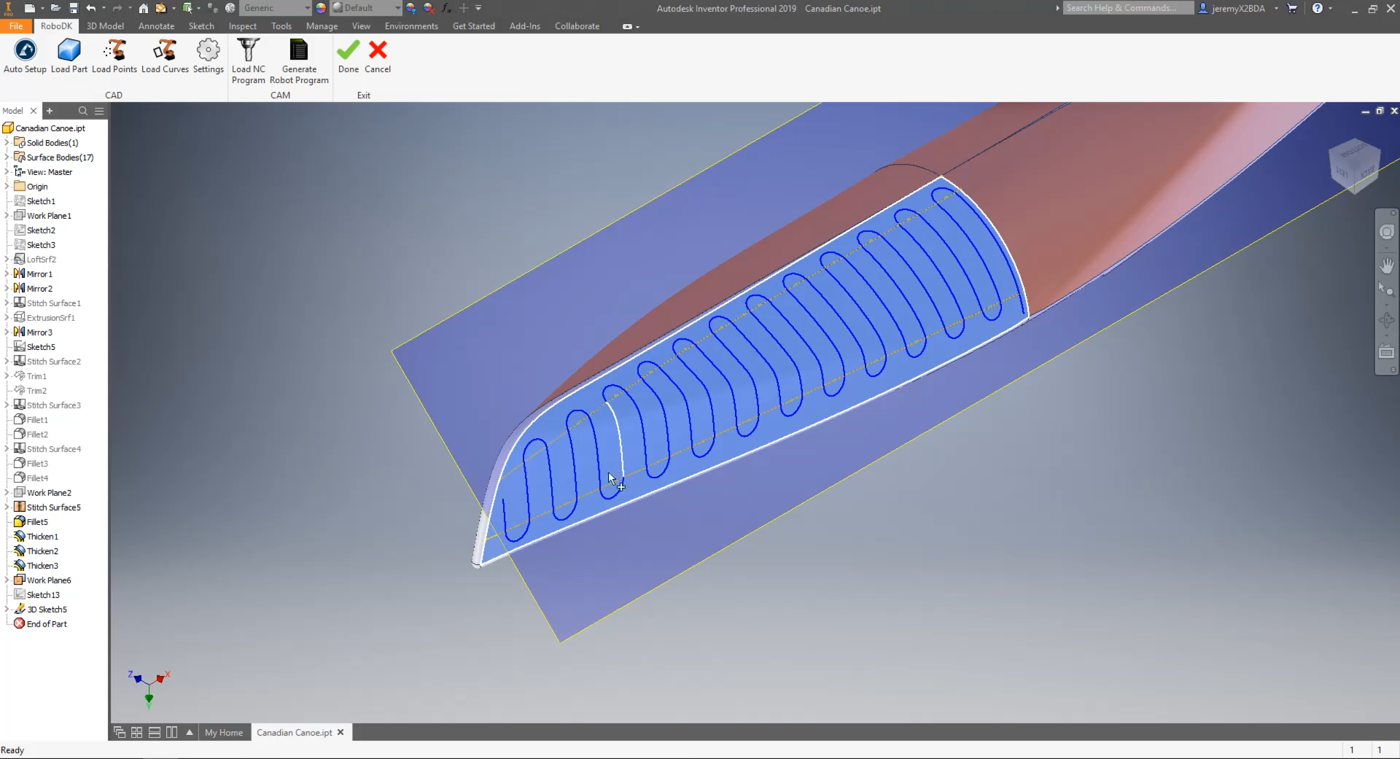
Neste exemplo, o RoboDK já desenhou a trajetória. Você pode torná-lo visível clicando com o botão direito do mouse em Sketch13 ➔ Visibility no menu do lado esquerdo, conforme mostrado na imagem abaixo.
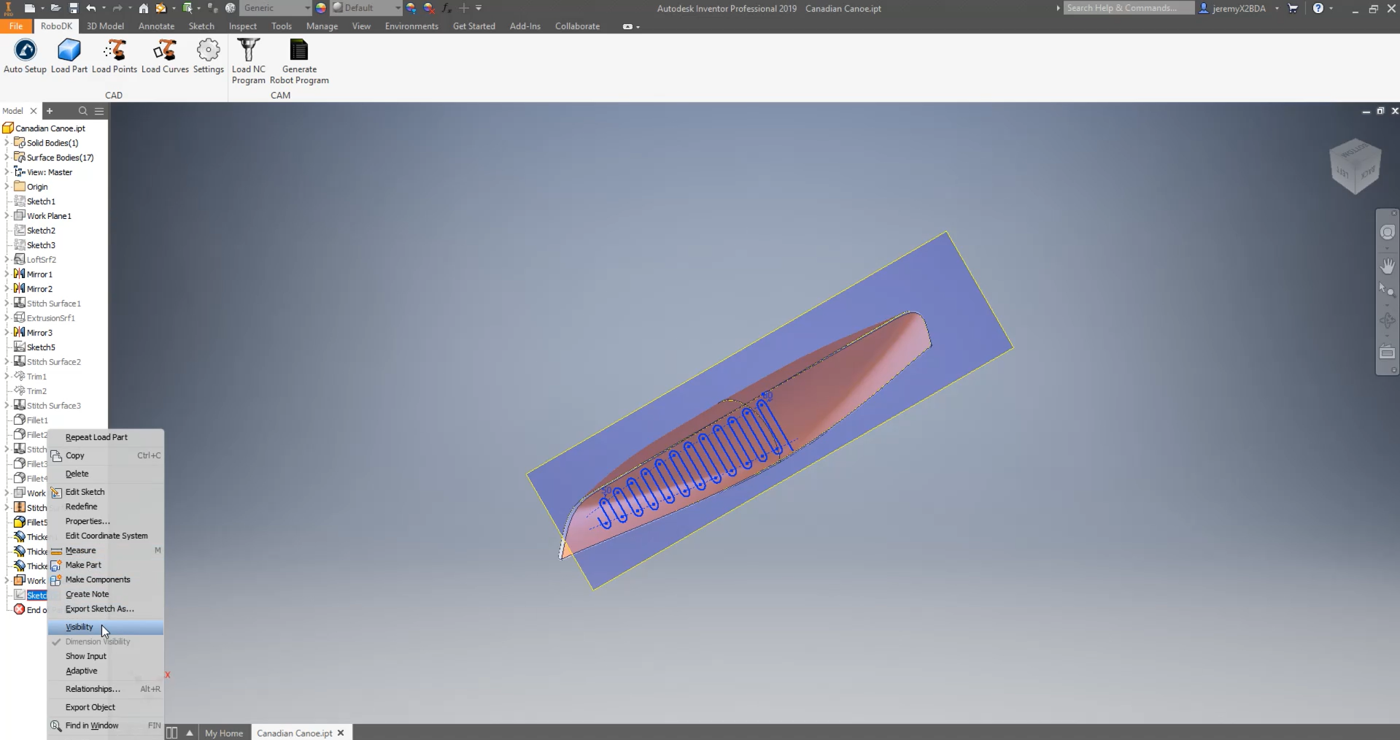
Como você pode ver, o caminho cobre toda a primeira seção selecionada. Você pode reabrir o esboço e modificar o caminho, se necessário, clicando com o botão direito do mouse no Sketch13 ➔ Edit Sketch.
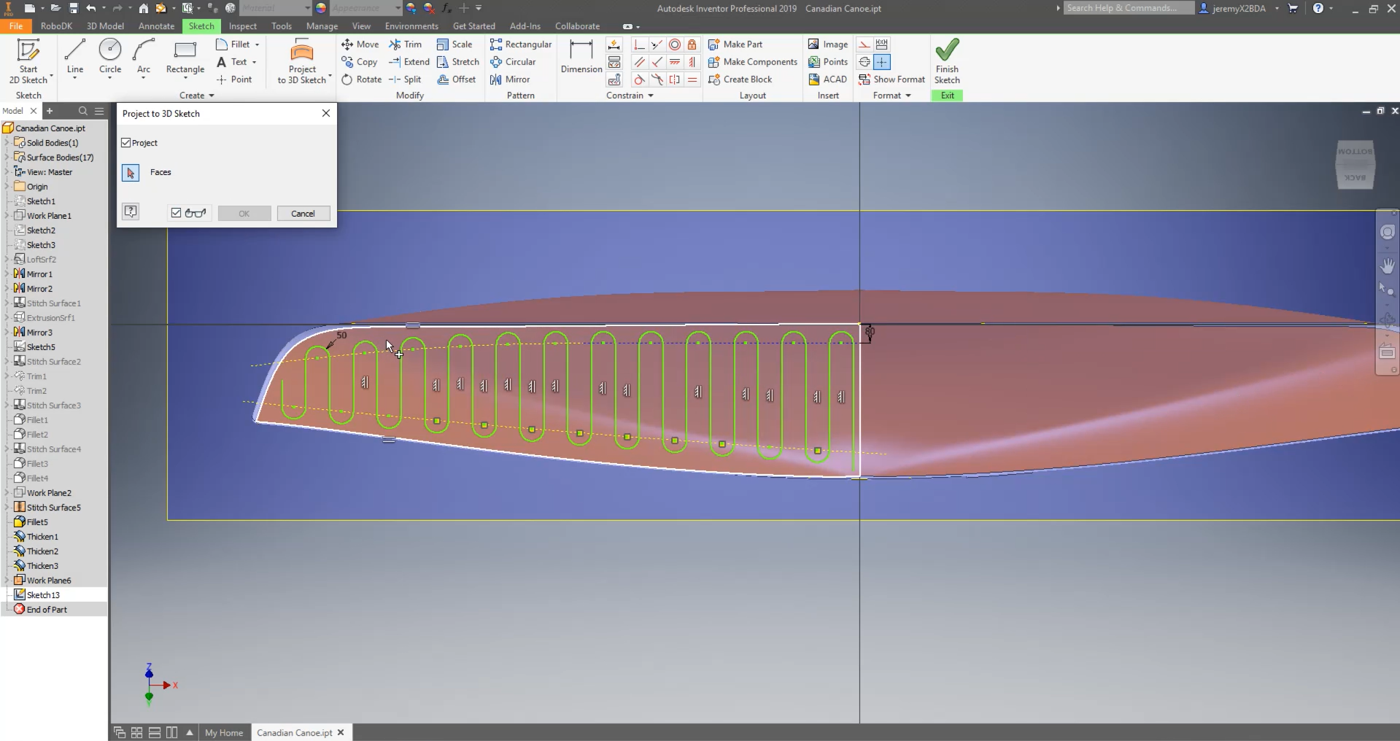
Agora é simples projetar esse caminho na superfície usando a ferramenta Inventor:
1.Selecione a guia Sketch no Inventor e selecione Project to 3D Sketch.
2.Selecione a superfície na qual deseja que o caminho seja projetado.
3.Selecione OK e Finish Sketch.
Assim que você aceitar essas modificações, será criado um esboço em 3D.
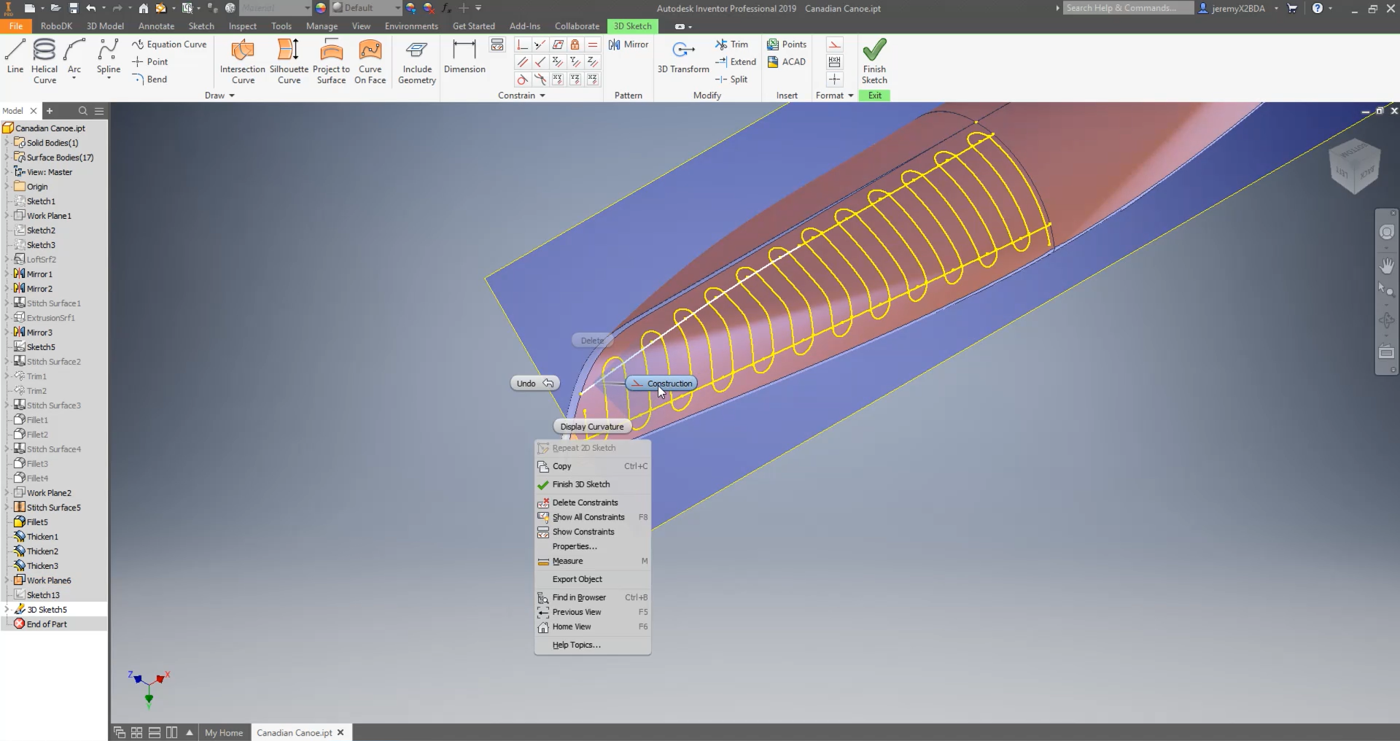
Certifique-se de que as linhas de construção criadas sejam definidas corretamente como linhas de construção:
1.Clique com o botão direito do mouse no Sketch13➔ Visibility para tornar o caminho visível.
2.Clique com o botão direito do mouse no Sketch13➔ Edit 3D Sketch
3.Selecione a linha que deseja verificar em seu modelo 3D.
4.Selecione Construção.
5.Selecione Finish Sketch.
Siga as próximas etapas para carregar seu esboço no RoboDK:
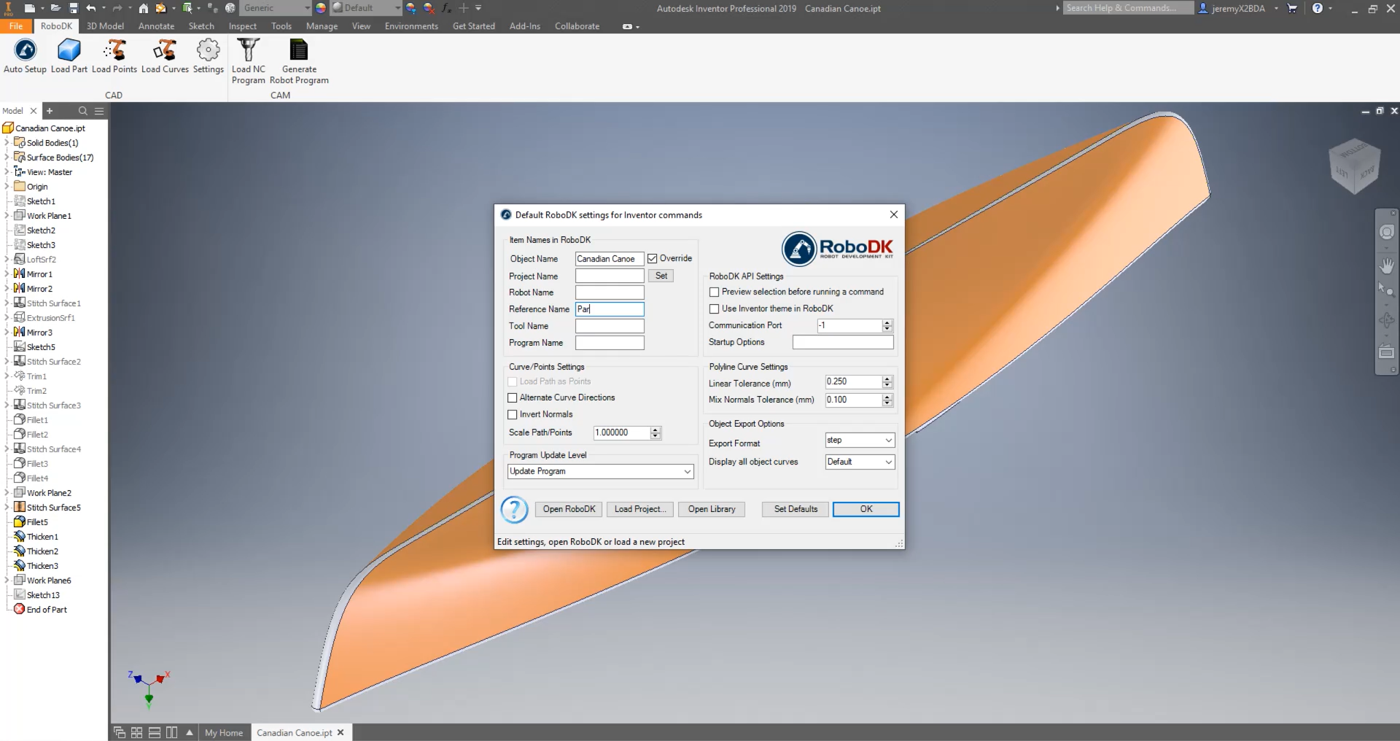
1.Selecione a guia RoboDK no Inventor e selecione
2.Digite o nome do objeto. Nesse caso, é Canadian Canoe.
3.Digite o nome de referência para onde você deseja que a peça seja importada. Neste exemplo, é Part. Se você não fornecer nenhum nome de referência, será usado o frame de referência ativo. Se não houver um frame de referência ativo, um novo será criado automaticamente.
4.Feche a janela Settings (Configurações) ou selecione OK.
5.Selecione o botão
6.Selecione todas as linhas e as superfícies superiores do seu esboço e pressione OK. Essa etapa é essencial, pois dará ao RoboDK as informações necessárias para calcular a normal à superfície e, portanto, calcular a orientação da ferramenta de polimento na superfície curva.
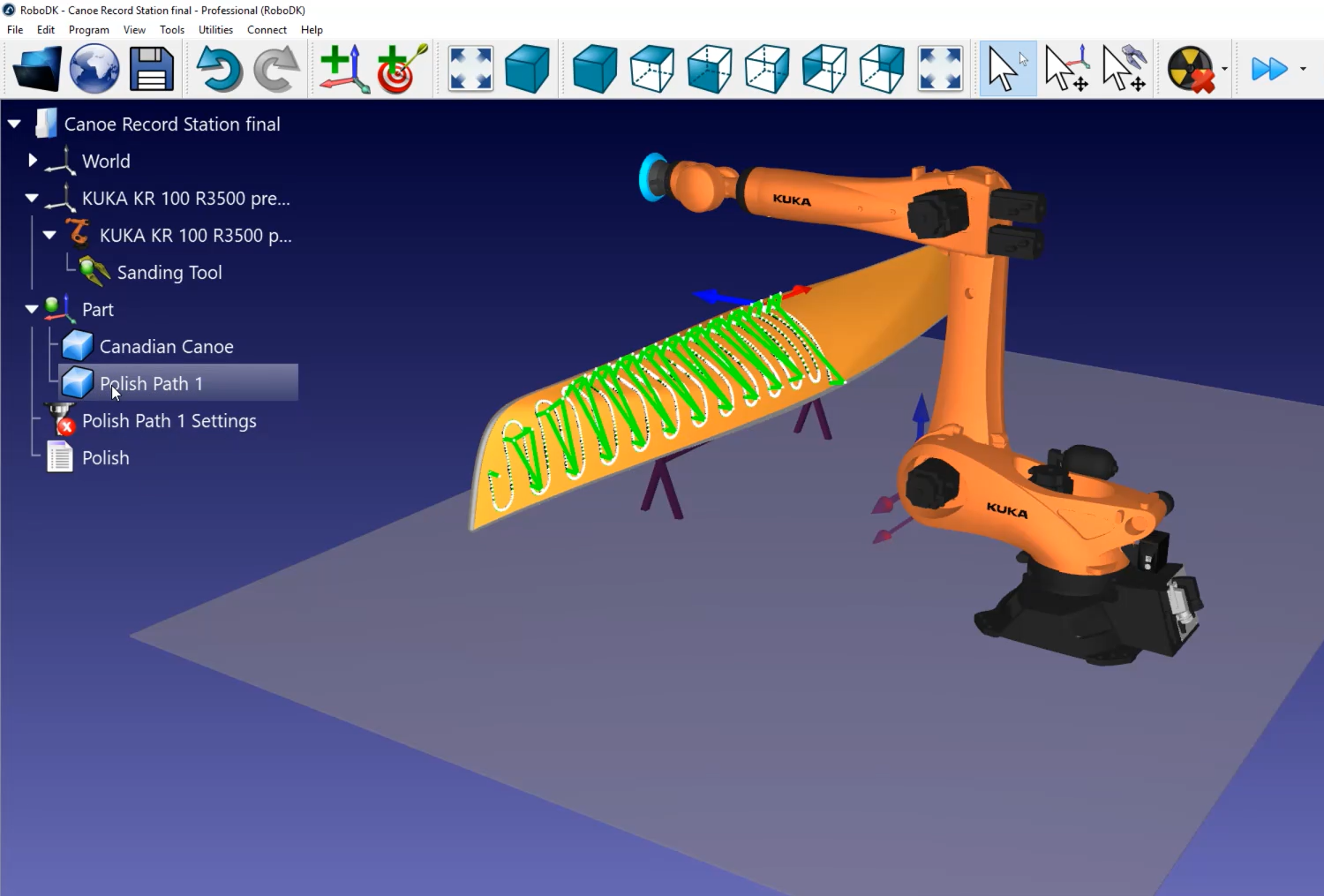
7.Selecione
Você deverá ver a peça (Canadian Canoe) e a trajetória (Polish Path 1) carregados no RoboDK no quadro de referência ativo (Part).