Estação RoboDK
A próxima etapa é verificar se a ordem em que as seções do caminho serão executadas está correta, selecionando
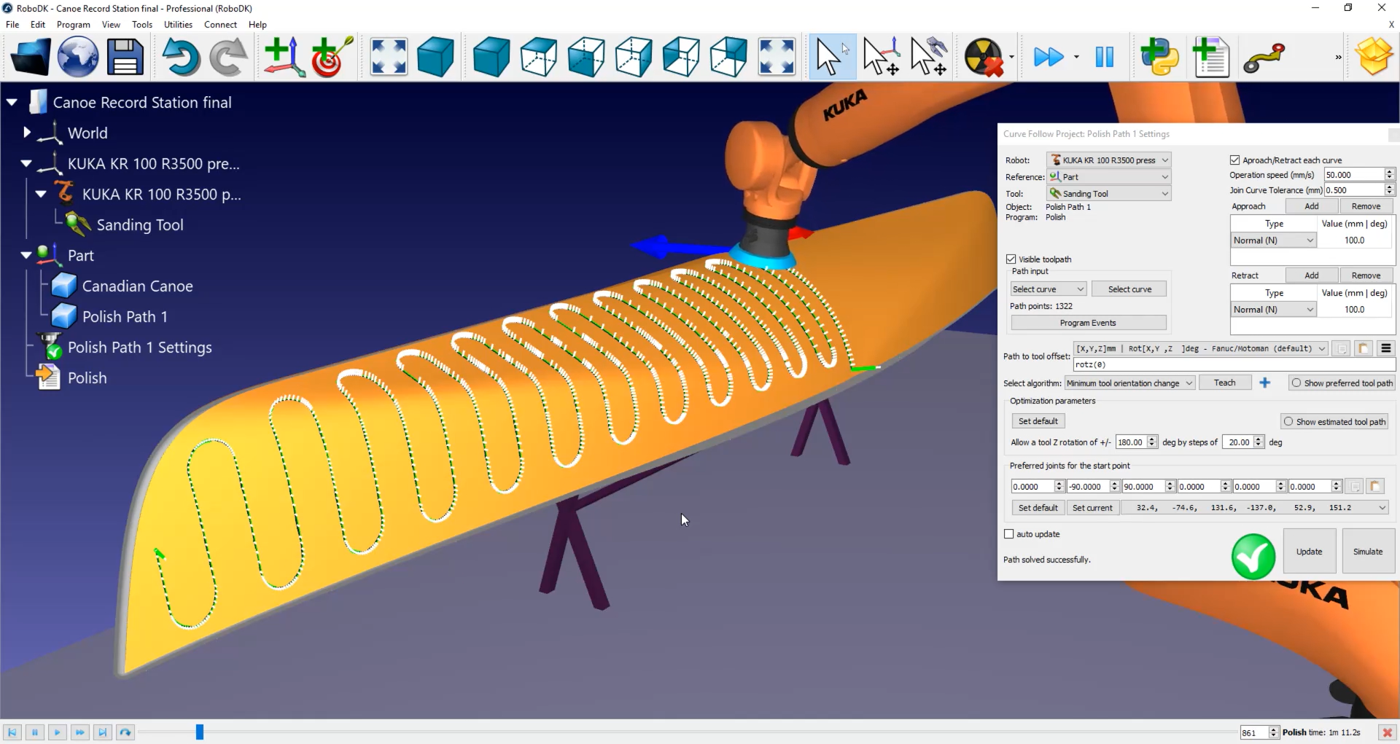
Você pode ver as pequenas linhas brancas saindo do caminho da canoa. Essas são as normais da superfície. Neste exemplo, todas parecem ter sido importadas corretamente.
Siga estas etapas para configurar a direção do caminho:
1.Selecione
2.Clique em Selecionar curva.
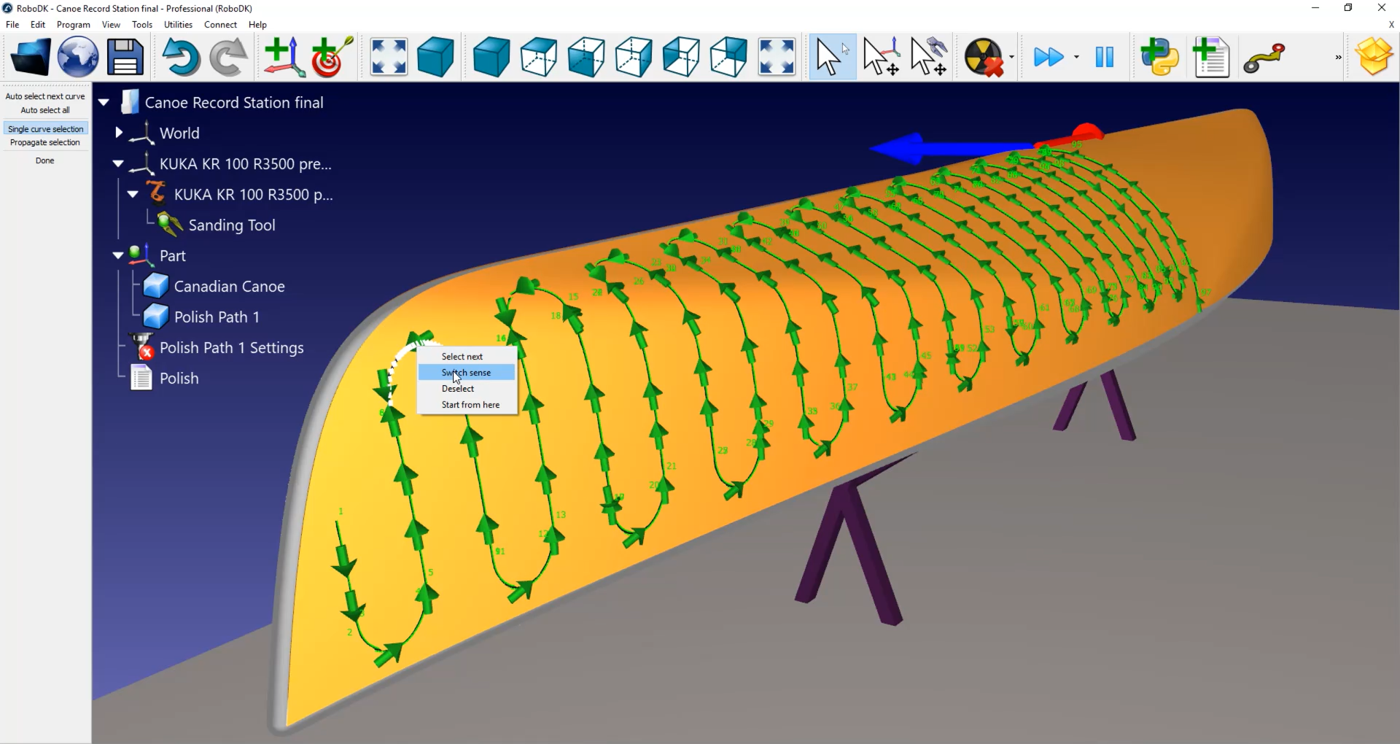
Agora Você pode ver a ordem e a direção em que os segmentos de caminho são executados. Se quiser mudar a direção, clique com o botão direito do mouse e selecione Mudar sentido.
Nesse caso, o caminho precisa ser refeito:
1.Clique com o botão direito do mouse em um espaço vazio da estação (ou seja, fundo azul).
2.Selecione Redefinir seleção.
3.Selecione a linha com a qual você deseja começar. Certifique-se de que ela esteja apontando para a direção correta.
4.Selecione a ferramenta Selecionar tudo automaticamente no canto superior esquerdo da tela.
5.Selecione Concluído.
Agora, você pode simular a estação clicando duas vezes em
Você também pode adicionar movimentos normais de 200 milímetros para ajudar a evitar a colisão entre o robô e a canoa, clicando duas vezes em
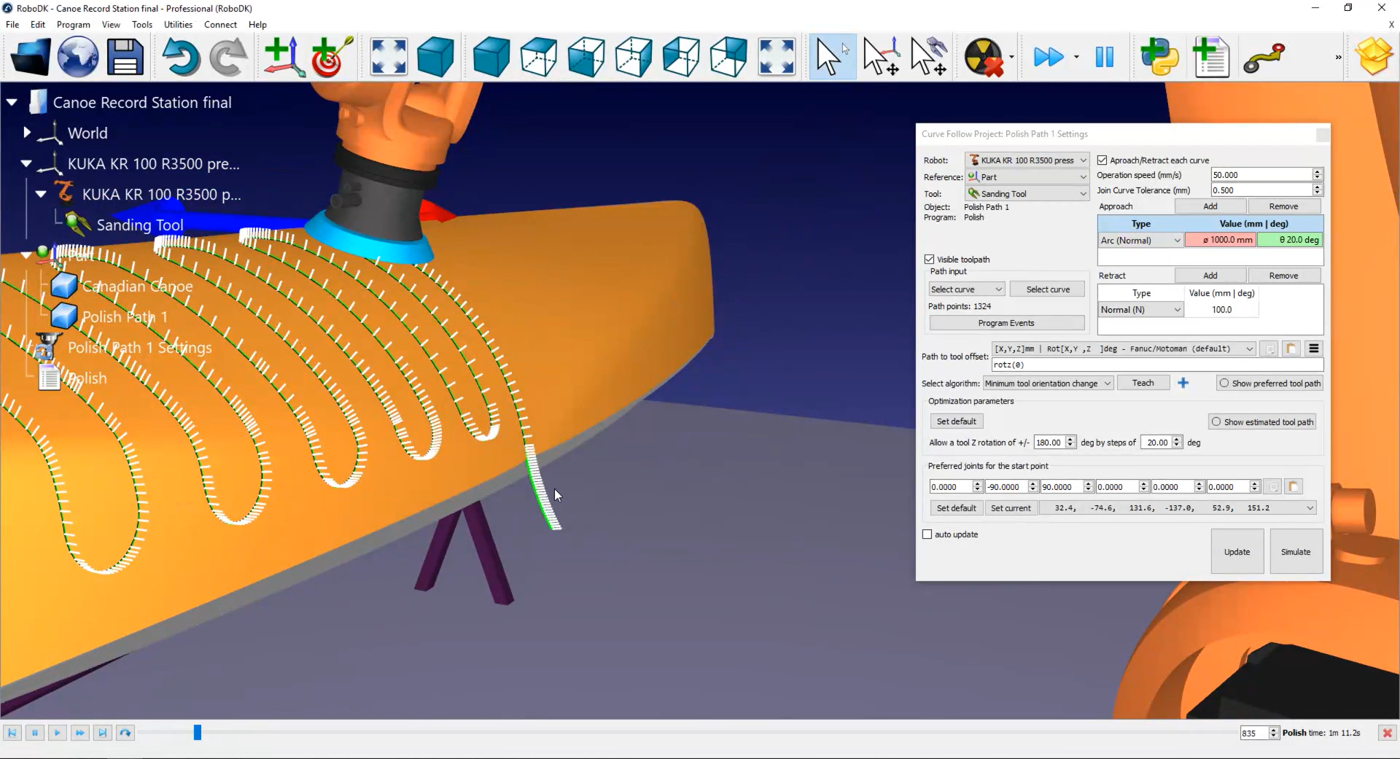
Você pode modificar a velocidade de aproximação e retração selecionando
Nesse menu, você também pode ativar a opção Definir arredondamento. Por padrão, cada linha branca ao longo do caminho é um ponto que será enviado ao controlador do robô como pontos em que o robô precisa parar. Em uma aplicação de polimento ou lixamento, esse não é o melhor comportamento.
Ative a caixa de seleção Definir arredondamento para ativar a opção de movimento contínuo em seu controlador. Dependendo da marca do robô, o nome dessa opção pode ser "rounding" (arredondamento), "constant movement" (movimento constante) ou "zone data" (dados da zona). Neste exemplo, o valor será de 0,5 mm.
Neste exemplo, como estamos usando um robô KUKA, você obterá um arquivo SRC ao gerar o programa do robô. Esse arquivo pode ser lido por um controlador KRC da KUKA.
Siga estas etapas para gerar um programa de robô:
1.Clique com o botão direito do mouse em
2.Selecione OK.
3.Clique com o botão direito do mouse em