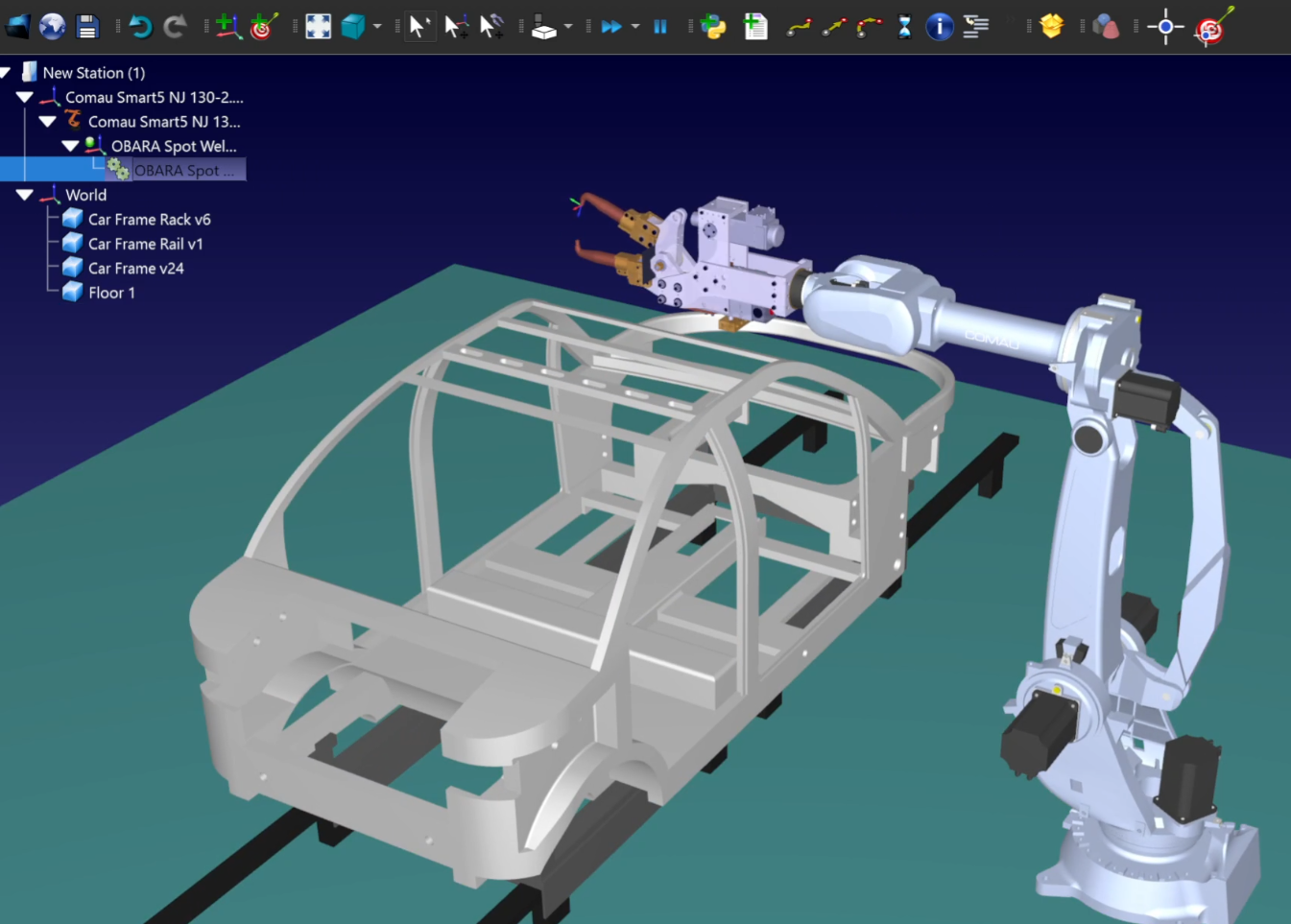
Componentes da estação
Primeiro, você deve carregar um robô e uma pinça de solda por pontos como ferramenta do robô.
Você pode usar os seguintes componentes da biblioteca on-line do RoboDK:
1.Robô: Comau Smart5 NJ 130-2.6
2.Ferramenta: Pinça de solda a ponto OBARA
O pedestal e a luminária serão carregados usando arquivos locais e, para criar o piso, usaremos o Add-in Formas. Você pode consultar o Guia de Introdução e a Documentação do Add-in Formaspara obter mais detalhes.