Alinhar o objeto com a referência
Esta seção explica como o frame de referência (sistema de coordenadas) de um objeto pode ser alinhado em relação à sua própria geometria. Esta seção permite mover o frame de referência de um objeto para um local que possa ser identificado em uma configuração real.
Siga estas etapas para alinhar virtualmente o frame de referência de um objeto de acordo com pontos específicos da geometria do objeto:
1.Carregar o objeto
2.Selecione a estação ativa 
3.Selecione Programs ➔ 
Certifique-se de que o frame de referência esteja diretamente conectado à raiz da estação (e não a outros Frames de referência).
4.Clique com o botão direito do mouse no frame de referência e selecione
O procedimento é muito semelhante ao da seção anterior. A principal diferença é que devemos selecionar os pontos do objeto virtual em vez do objeto real.
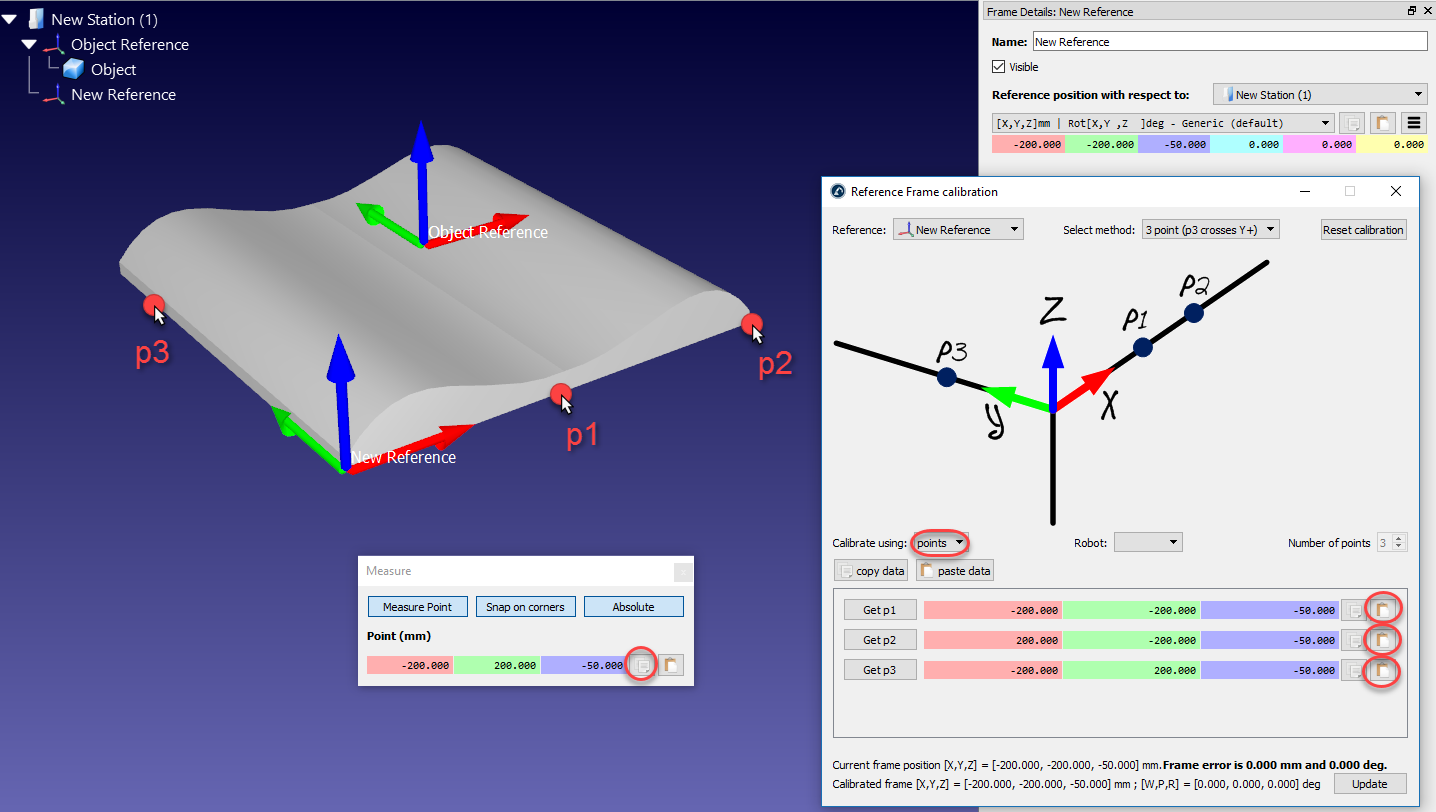
5.Selecione o método de calibração desejado.
Por exemplo: O método de 3 pontos (com o terceiro ponto cruzando o eixo Y+).
6.Selecione Calibrar usando pontos
7.Selecione Ferramentas ➔ Medição para abrir a Ferramenta de medição
8.Selecione o botão Absoluto na Ferramenta de medição para que os pontos sejam medidos em relação à estação (referência absoluta)
9.Selecione os 3 pontos no objeto virtual (um por um) e insira-os na janela Calibração do frame de referência
10.Selecione Atualizar. O frame de referência deve aparecer no local desejado.
11.Clique com o botão direito do mouse no objeto e selecione Alterar suporte. Em seguida, selecione o novo frame de referência. A posição absoluta do objeto não será alterada. Entretanto, a posição relativa do objeto com relação ao novo frame de referência será definida corretamente.
12.O objeto e sua própria referência estão prontos para a programação off-line: Arraste e solte o novo frame de referência para o frame de referência do robô.