Alinhar referências de robôs
Esta seção explica como dois ou mais robôs podem ser programados off-line enquanto compartilham um frame de referência comum.
Em uma aplicação típica de programação off-line, a posição do objeto é atualizada em relação ao robô. Entretanto, quando dois ou mais robôs são usados para a mesma aplicação, a posição de cada robô deve ser atualizada em relação a uma referência comum (um objeto de referência ou um frame de referência comum).
Siga estas etapas para atualizar a posição de dois ou mais robôs em relação a um frame de referência:
1.Certifique-se de que os Frames de referência do robô e o frame de referência do objeto não dependam um do outro. Se houver uma dependência, devemos colocar os Frames de referência anexados ao item da estação.
2.Adicione um novo frame de referência anexado a cada um dos quadros de base do robô como se você fosse definir um novo frame de referência individual para cada robô (Real Ref. A e Real Ref. B).
Esse frame de referência representará a localização real da peça em relação a cada robô.
3.Calibre cada um desses Frames de referência (Real Ref. A e Real Ref. B), separadamente, usando o procedimento de Calibração de Referência padrão (método de 3 pontos, por exemplo)
Neste ponto, veremos 3 Frames de referência que deveriam ser coincidentes, mas não são. O frame de referência de cada robô deve ser atualizado para corrigir esse problema:
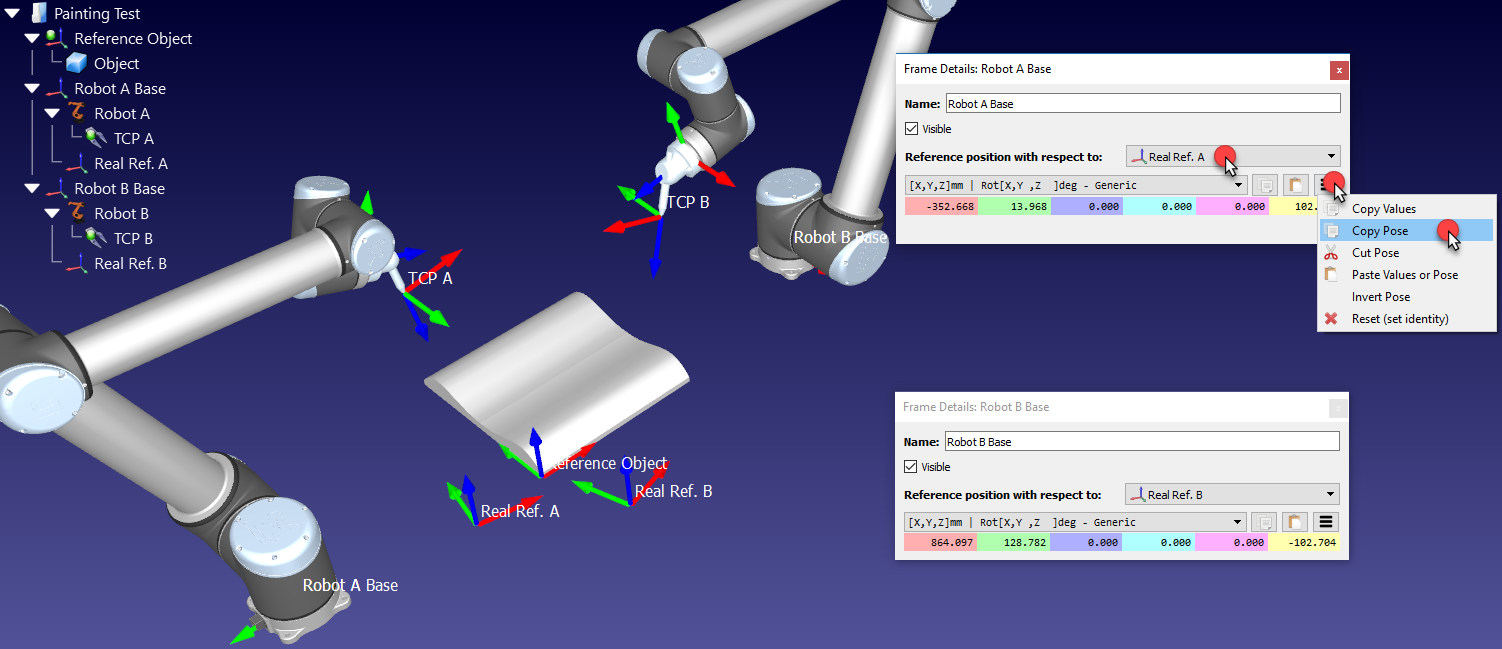
4.Clique duas vezes em uma das referências do robô, como Robot A Base, para abrir a janela do frame de referência
5.Copie a posição da referência de base do robô em relação à referência calibrada desse robô (Real Ref. A), selecionando o botão de cópia
6.Na mesma janela, altere a posição de referência em relação a (menu suspenso) para o objeto de referência
7.Cole a posição copiada. O robô será movido e o Real Ref. A será coincidente com o quadro do objeto de referência
8.Repita as etapas 4 a 7 deste procedimento para os outros robôs, se houver
Ao final desse procedimento, todos os Frames de referência devem corresponder e a relação entre todas as referências calibradas e o objeto de referência deve ser a mesma.