O utilitário de definição da frame de referência descrito na seção anterior oferece duas maneiras de calibrar a posição de uma plataforma giratória em relação a um robô. A calibração/identificação da plataforma giratória pode ser feita usando o robô com uma ferramenta adequadamente definida ou um sistema de medição (como um laser tracker).
Precisamos recuperar a posição de um ponto na plataforma giratória várias vezes à medida que movemos os eixos da plataforma giratória. Atualmente, oferecemos suporte à calibração de plataformas giratórias de 1 e 2 eixos.
Importante: Defina o TCP adequadamente antes de identificar o frame de referência (a menos que você use pontos medidos a partir de um sistema de medição externo). Isso é importante porque a frame de referência é identificada usando a cinemática do robô. Isso também se aplica se você recuperar pontos do terminal de programação do robô. Quaisquer erros provenientes da calibração da ferramenta (TCP) serão transferidos para a identificação da posição da plataforma giratória.
Calibrar uma plataforma giratória de um eixo
Siga este procedimento para calibrar uma plataforma giratória de 1 eixo.
1.Selecione Utilitários ➔ Definir referência
2.Selecione o Frame de Referência para definir/calibrar. Como alternativa, clique com o botão direito do mouse em um frame de referência e selecione Definir frame de referência).
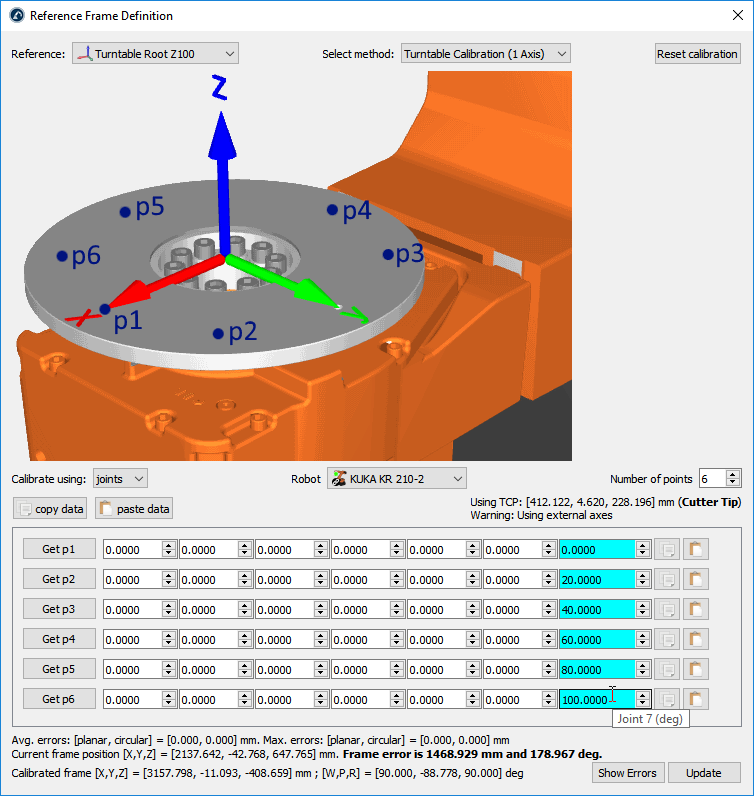
3.Selecione o método Calibração da plataforma giratória (1 eixo)
4.Selecione Calibrar usando eixos (configuração padrão). Você pode alterá-la para pontos se tiver a posição XYZ de cada ponto em relação à estrutura de base do robô.
5.Especifique o robô se houver mais de um robô disponível na estação.
6.Selecione o número de pontos que você gostaria de obter (o mínimo exigido é 3).
Importante: Você deve sondar o mesmo ponto da plataforma giratória, com o robô, à medida que move a plataforma giratória. A mesa giratória precisa ser movida no sentido positivo de rotação (como mostrado na figura anterior). Recomenda-se usar um mínimo de 6 a 10 pontos para que você tenha uma melhor compreensão dos erros envolvidos na movimentação da plataforma giratória.
Importante: o primeiro ponto definirá o eixo X da plataforma giratória (referência estática).
Importante: O plano XY do frame de referência calibrado corresponderá ao plano descrito pelo arco/círculo. Talvez seja necessário ajustar esse deslocamento se você não tiver tomado os pontos nesse plano. Por exemplo, você pode adicionar um novo frame de referência aninhado ao frame de referência calibrado para representar a raiz da plataforma giratória.
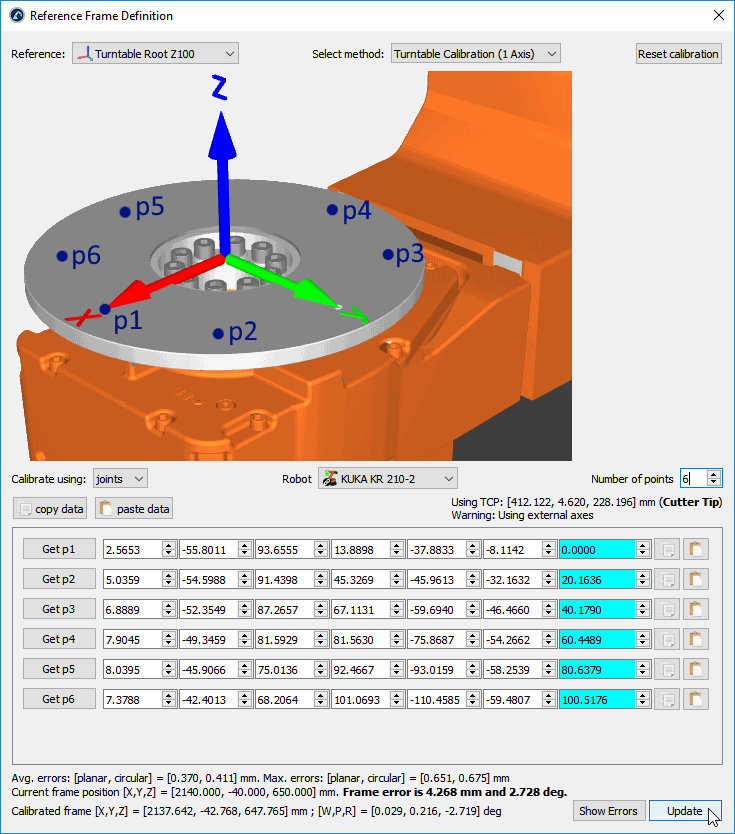
7.Comece a preencher a tabela com as posições (ou pontos) de articulação do robô.
Dica: A lista de configurações pode ser preenchida manualmente ou usando os botões copiar/colar (botões à direita dos valores dos eixos).
Dica: Se Você estiver conectado ao robô, poderá selecionar os botões "Obter p" para recuperar os valores de eixo do robô diretamente do robô. Mais informações sobre a configuração estão disponíveis na seção Drivers do robô. Essa opção não está disponível para todos os robôs e pode exigir opções de software adicionais vendidas pelo fabricante do robô.
Importante: Se você inserir os valores manualmente, é recomendável fornecer cada valor de eixo com pelo menos 4 casas decimais (ao fornecer valores de eixo). O número permitido de valores decimais pode ser alterado em Ferramentas➔ Opções➔ Precisão➔ Decimais Max.
Observação: O RoboDK manterá uma cópia dos dados fornecidos na estação RDK quando você selecionar a atualização.
8.Finalmente, selecione Atualizar para aplicar a nova posição ao frame de referência selecionado na Estação RoboDK.
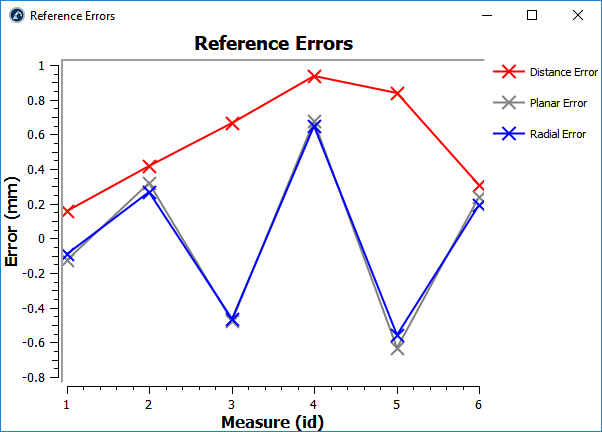
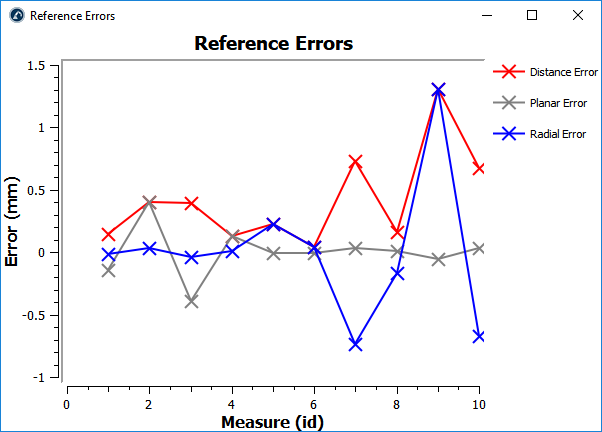
9.Selecione Exibir Erros para exibir o nível de erro em cada ponto (os erros de distância são equivalentes aos erros planares e aos erros radiais combinados)
Calibrar uma plataforma giratória de dois eixos
Siga este procedimento para calibrar uma plataforma giratória de dois eixos.
1.Selecione Utilitários ➔ Definir referência
2.Selecione o Frame de Referência para definir/calibrar. Como alternativa, clique com o botão direito do mouse em um frame de referência e selecione Definir frame de referência.
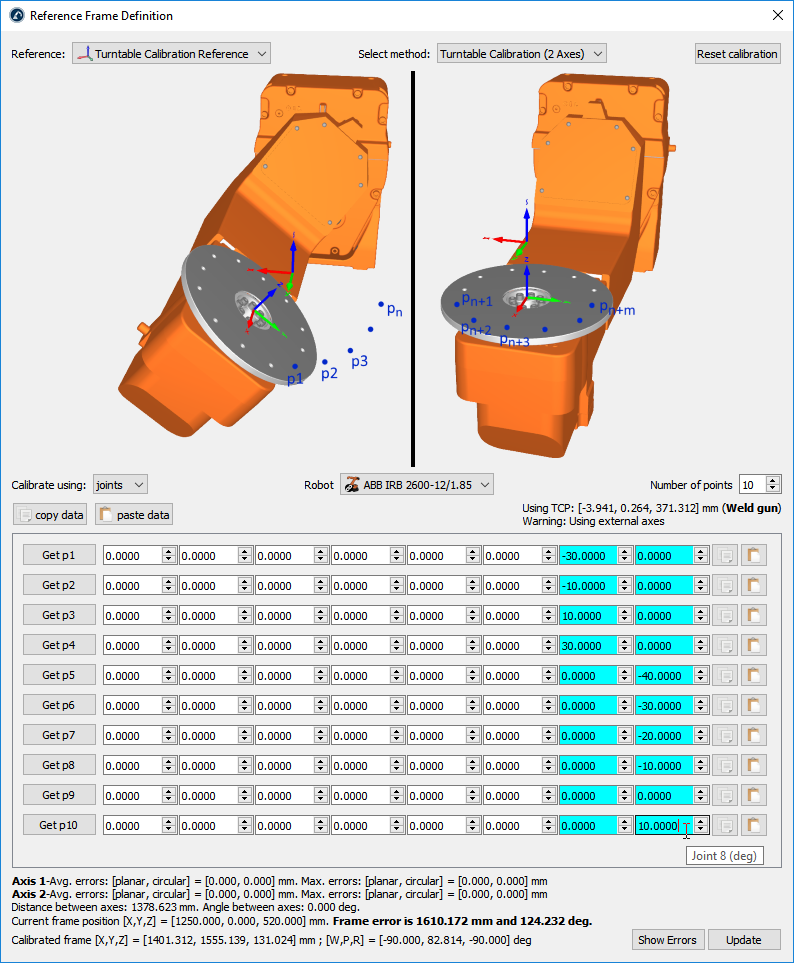
3.Selecione o método Calibração da plataforma giratória (2 eixos)
4.Selecione Calibrar usando eixos (configuração padrão). Você pode mudar para pontos (em vez de eixos) se tiver a posição XYZ de cada ponto em relação à estrutura da base do robô.
5.Especifique o robô se houver mais de um robô disponível na estação.
6.Selecione o número de pontos que você gostaria de obter (o mínimo exigido é 6 pontos: 3 pontos para cado eixo).
Importante: Você deve sondar o mesmo ponto da mesa giratória, com o robô, à medida que move a mesa giratória. A mesa giratória precisa ser movida no sentido positivo de rotação para cado eixo. Você deve mover primeiro o eixo 1 e, em seguida, o eixo 2 (conforme mostrado na figura anterior). Recomenda-se usar um mínimo de 12 a 20 pontos para ter uma melhor compreensão dos erros envolvidos na movimentação da plataforma giratória.
Observação: O número de pontos usados para identificar o eixo 1 não precisa ser igual ao número de pontos usados para identificar o eixo 2 (por exemplo, você pode usar 4 pontos para identificar o eixo 1 e 6 pontos para identificar o eixo 2).
Importante: o eixo Z da referência calibrada corresponderá ao eixo 2. O eixo X da referência calibrada corresponderá à normal comum. Além disso, a origem da referência calibrada será colocada na interseção entre o eixo 2 e a normal comum (ponto no eixo 2 que está mais próximo do eixo 1).
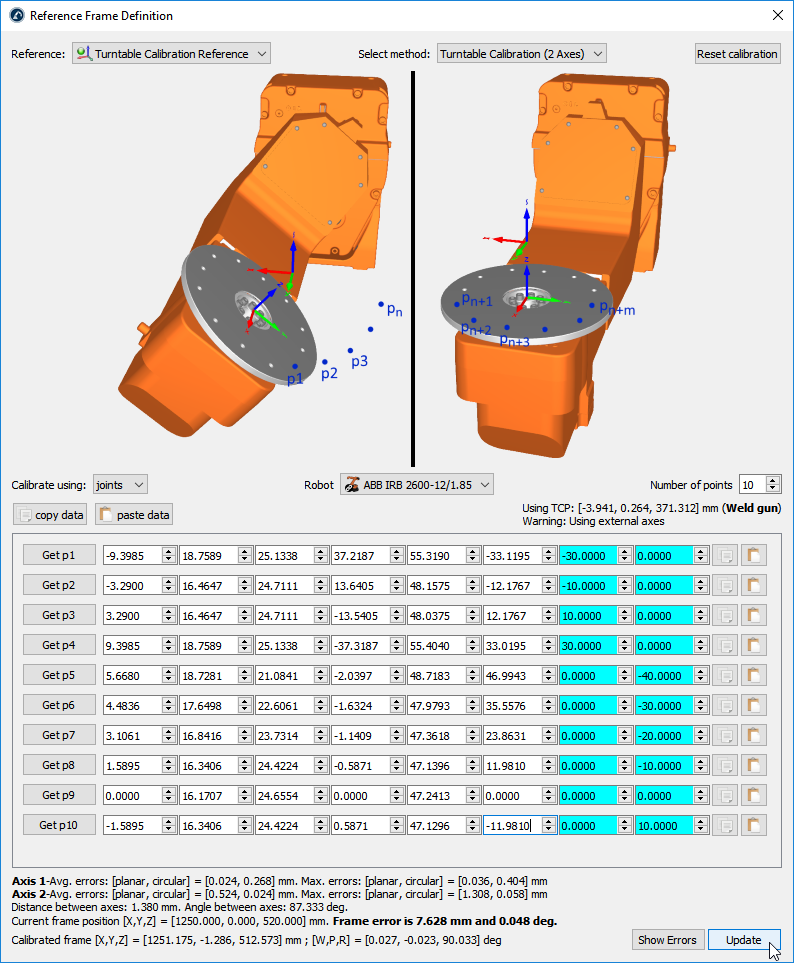
7.Comece a preencher a tabela com as posições (ou pontos) de articulação do robô.
Dica: A lista de configurações pode ser preenchida manualmente ou usando os botões copiar/colar (botões à direita dos valores dos eixos).
Dica: Se Você estiver conectado ao robô, poderá selecionar os botões "Obter p" para recuperar os valores de eixo do robô diretamente do robô. Mais informações sobre a configuração estão disponíveis na seção Drivers do robô. Essa opção não está disponível para todos os robôs e pode exigir opções de software adicionais vendidas pelo fabricante do robô.
Importante: Se você inserir os valores manualmente, é recomendável fornecer cada valor de eixo com pelo menos 4 casas decimais (ao fornecer valores de eixo). O número permitido de valores decimais pode ser alterado em Ferramentas ➔ Opções ➔ Precisão ➔ Decimais Max.
Observação: O RoboDK manterá uma cópia dos dados fornecidos na estação RDK quando você selecionar a atualização.
8.Finalmente, selecione Atualizar para aplicar a nova posição ao frame de referência selecionado na Estação RoboDK.
9.Selecione Exibir Erros para exibir o nível de erro em cada ponto (os erros de distância são equivalentes aos erros planares e aos erros radiais combinados)