Siga este procedimento para calibrar uma plataforma giratória de dois eixos.
1.Selecione Utilitários ➔ Definir referência
2.Selecione o Frame de Referência para definir/calibrar. Como alternativa, clique com o botão direito do mouse em um frame de referência e selecione Definir frame de referência.
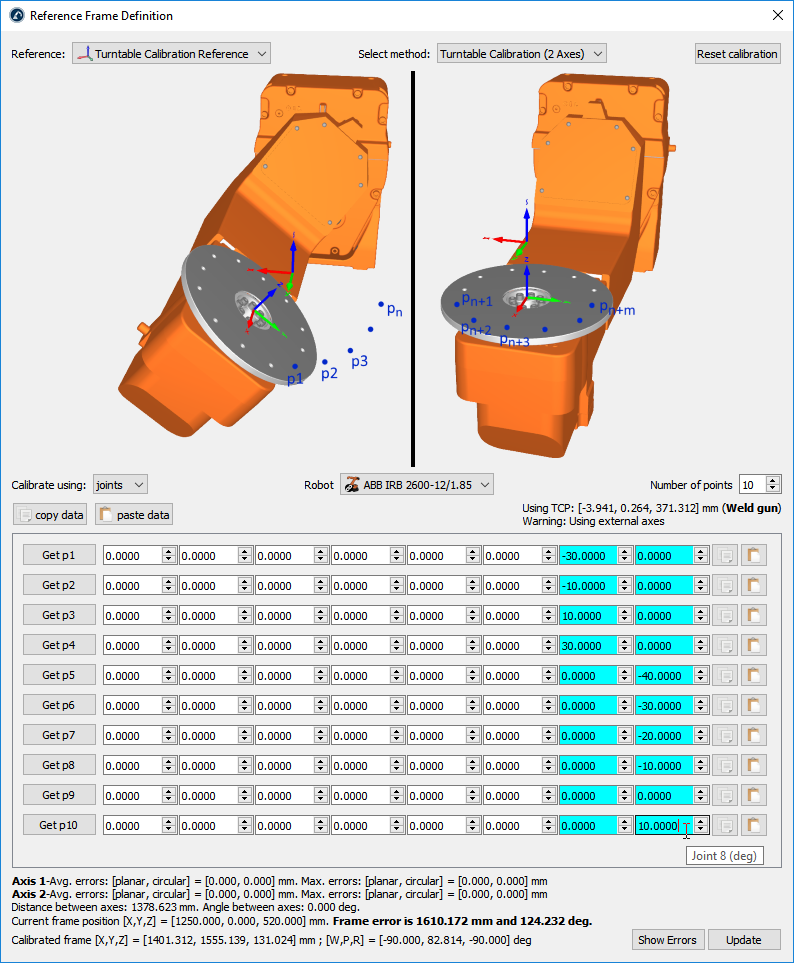
3.Selecione o método Calibração da plataforma giratória (2 eixos)
4.Selecione Calibrar usando eixos (configuração padrão). Você pode mudar para pontos (em vez de eixos) se tiver a posição XYZ de cada ponto em relação à estrutura da base do robô.
5.Especifique o robô se houver mais de um robô disponível na estação.
6.Selecione o número de pontos que você gostaria de obter (o mínimo exigido é 6 pontos: 3 pontos para cado eixo).
Importante: Você deve sondar o mesmo ponto da mesa giratória, com o robô, à medida que move a mesa giratória. A mesa giratória precisa ser movida no sentido positivo de rotação para cado eixo. Você deve mover primeiro o eixo 1 e, em seguida, o eixo 2 (conforme mostrado na figura anterior). Recomenda-se usar um mínimo de 12 a 20 pontos para ter uma melhor compreensão dos erros envolvidos na movimentação da plataforma giratória.
Observação: O número de pontos usados para identificar o eixo 1 não precisa ser igual ao número de pontos usados para identificar o eixo 2 (por exemplo, você pode usar 4 pontos para identificar o eixo 1 e 6 pontos para identificar o eixo 2).
Importante: o eixo Z da referência calibrada corresponderá ao eixo 2. O eixo X da referência calibrada corresponderá à normal comum. Além disso, a origem da referência calibrada será colocada na interseção entre o eixo 2 e a normal comum (ponto no eixo 2 que está mais próximo do eixo 1).
7.Comece a preencher a tabela com as posições (ou pontos) de articulação do robô.
Dica: A lista de configurações pode ser preenchida manualmente ou usando os botões copiar/colar (botões à direita dos valores dos eixos).
Dica: Se Você estiver conectado ao robô, poderá selecionar os botões "Obter p" para recuperar os valores de eixo do robô diretamente do robô. Mais informações sobre a configuração estão disponíveis na seção Drivers do robô. Essa opção não está disponível para todos os robôs e pode exigir opções de software adicionais vendidas pelo fabricante do robô.
Importante: Se você inserir os valores manualmente, é recomendável fornecer cada valor de eixo com pelo menos 4 casas decimais (ao fornecer valores de eixo). O número permitido de valores decimais pode ser alterado em Ferramentas ➔ Opções ➔ Precisão ➔ Decimais Max.
Observação: O RoboDK manterá uma cópia dos dados fornecidos na estação RDK quando você selecionar a atualização.
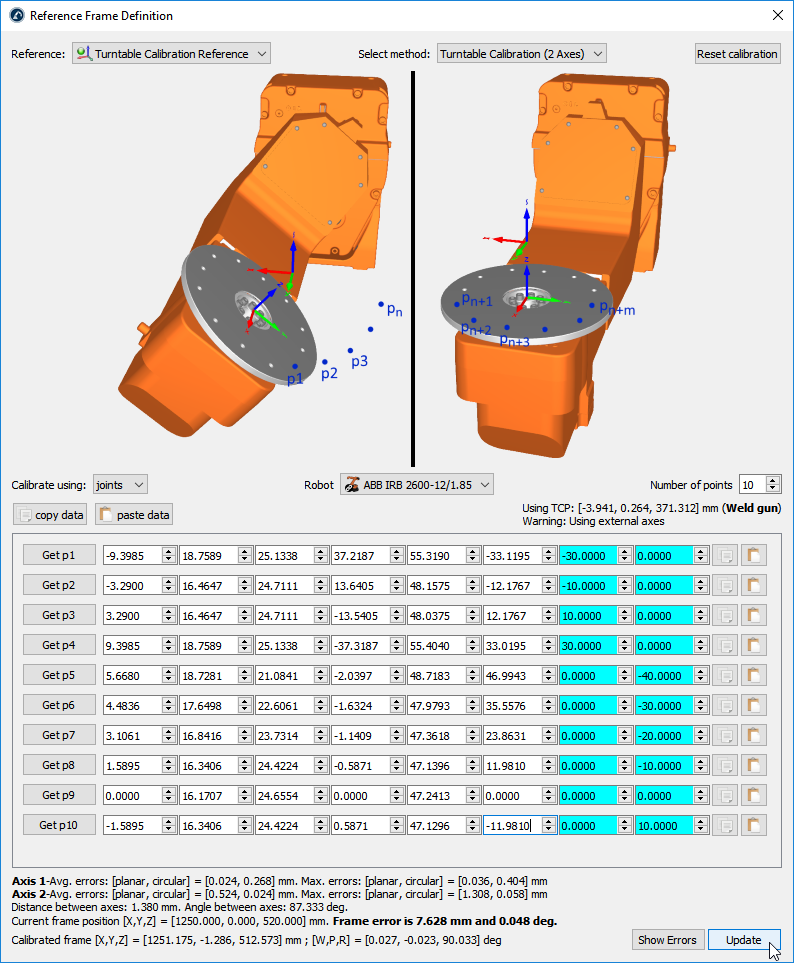
8.Finalmente, selecione Atualizar para aplicar a nova posição ao frame de referência selecionado na Estação RoboDK.
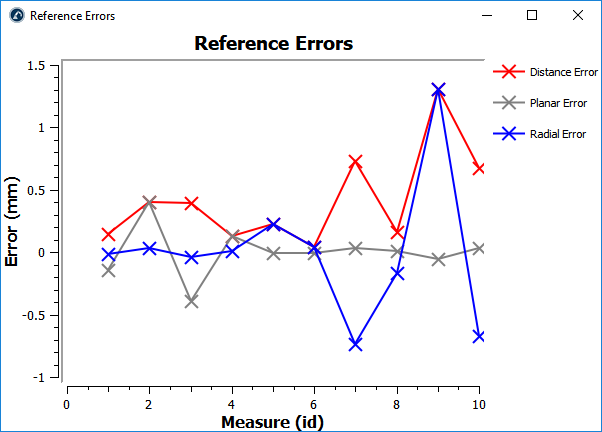
9.Selecione Exibir Erros para exibir o nível de erro em cada ponto (os erros de distância são equivalentes aos erros planares e aos erros radiais combinados)