Como acoplar eixos de robôs
Alguns robôs têm duas articulações acopladas, o que significa que dois dos valores de eixo do robô são dependentes. Por exemplo, os robôs Fanuc têm o eixo 2 e o eixo 3 acoplados.
Siga estas etapas para acoplar as articulações de seu robô no RoboDK:
1.Primeiro, clique duas vezes no robô para abrir o painel do robô.
2.Clique em Parâmetros para abrir a guia Parâmetros do robô
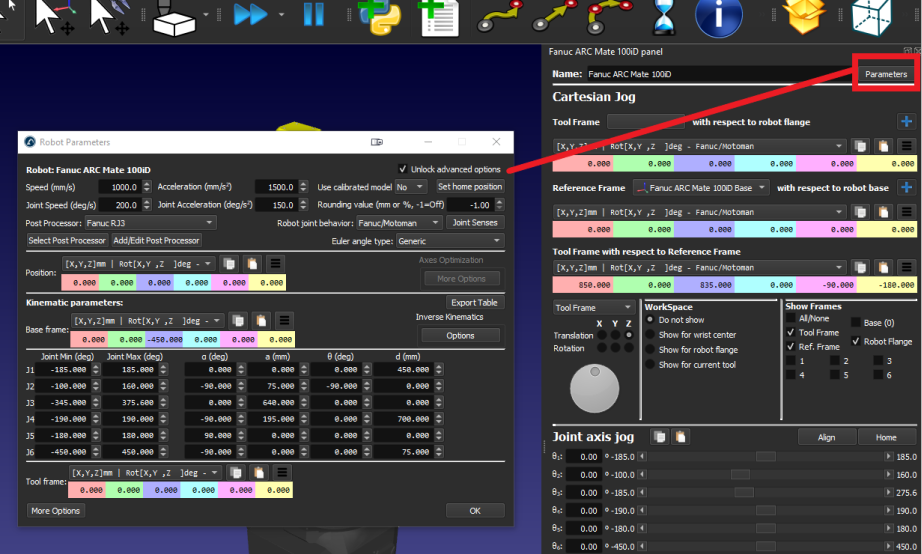
3.Marque a caixa Desbloquear opções avançadas.
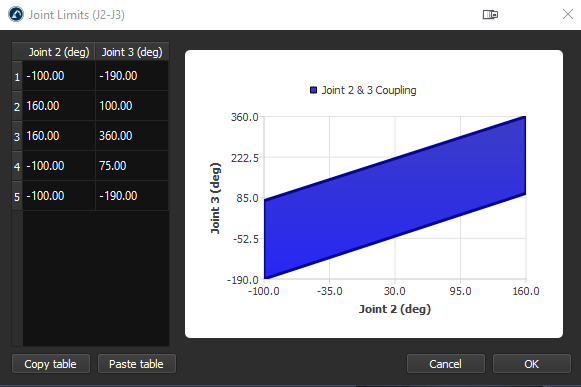
Clique em Sentidos da articulação para abrir a guia Sentido do eixo da articulação. Os primeiros 6 valores representam a direção de giro das articulações e o último valor é o acoplamento das articulações 2 e 3. Altere o 7º valor para -1 para vincular as articulações. Uma nova guia com o polígono de limite do eixo de acoplamento será aberta; você pode editar os limites para evitar que o robô colida consigo mesmo.