Como modelar um braço robótico de seis eixos
Este exemplo mostra como modelar um braço de robô industrial de 6 eixos a partir do zero, usando os modelos 3D fornecidos pelo fabricante.
Siga estas etapas para reunir algumas informações sobre seu robô:
1.Em primeiro lugar, você precisa dos modelos 3D (como arquivos STEP ou IGES).
2.Você também precisará da folha de dados ou do manual do robô.
Siga estas etapas no RoboDK para abrir a janela do modelo do robô:
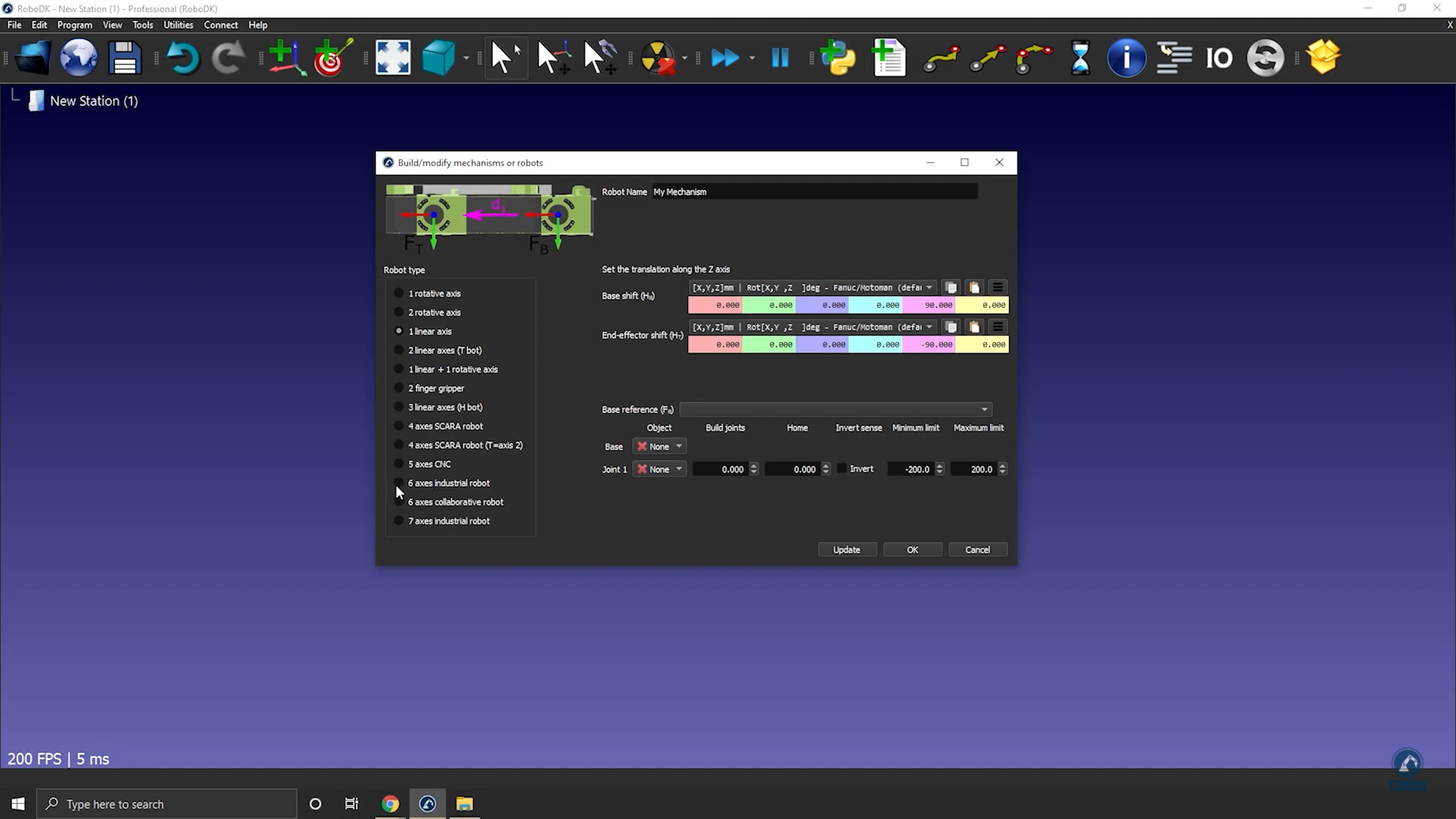
3.Selecione Utilitários➔ Modelar Mecanismo ou Robô.
4.Em Tipo de robô, selecione Robô industrial de 6 eixos.
Carregue os arquivos 3D do seu robô no RoboDK fazendo o seguinte:
5.Arraste e solte seu robô no RoboDK ou selecione o arquivo e abra-o (pode levar alguns segundos para carregar).
Siga estas etapas para dividir um objeto em diferentes partes para que possamos tratar cada parte separadamente:
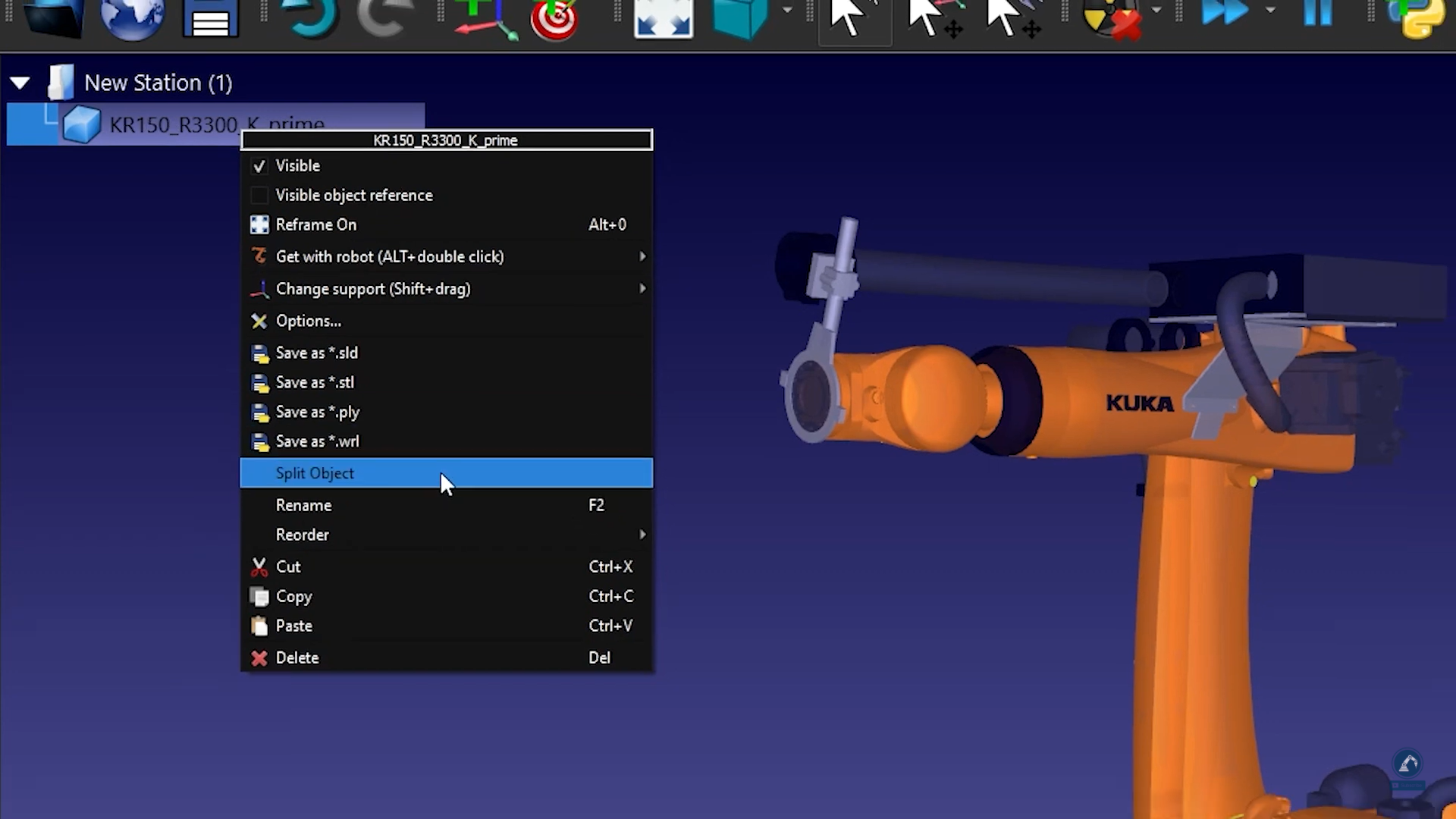
6.Se o arquivo CAD que você baixou estiver em um único objeto, é possível desagrupar o objeto (arquivo STEP) clicando com o botão direito do mouse em qualquer objeto e selecionando Separar Objeto.
7.Em seguida, você pode reagrupá-las para criar as diferentes peças do robô.
Siga estas etapas para inserir as informações cinemáticas do robô no RoboDK:
8.Dê um nome ao seu robô inserindo-o em Nome do Robô.
9.Se as peças do seu robô estiverem na ordem correta, todos os modelos 3D deverão ser preenchidos corretamente. Caso contrário, você pode vincular manualmente cada objeto à articulação correta do robô.
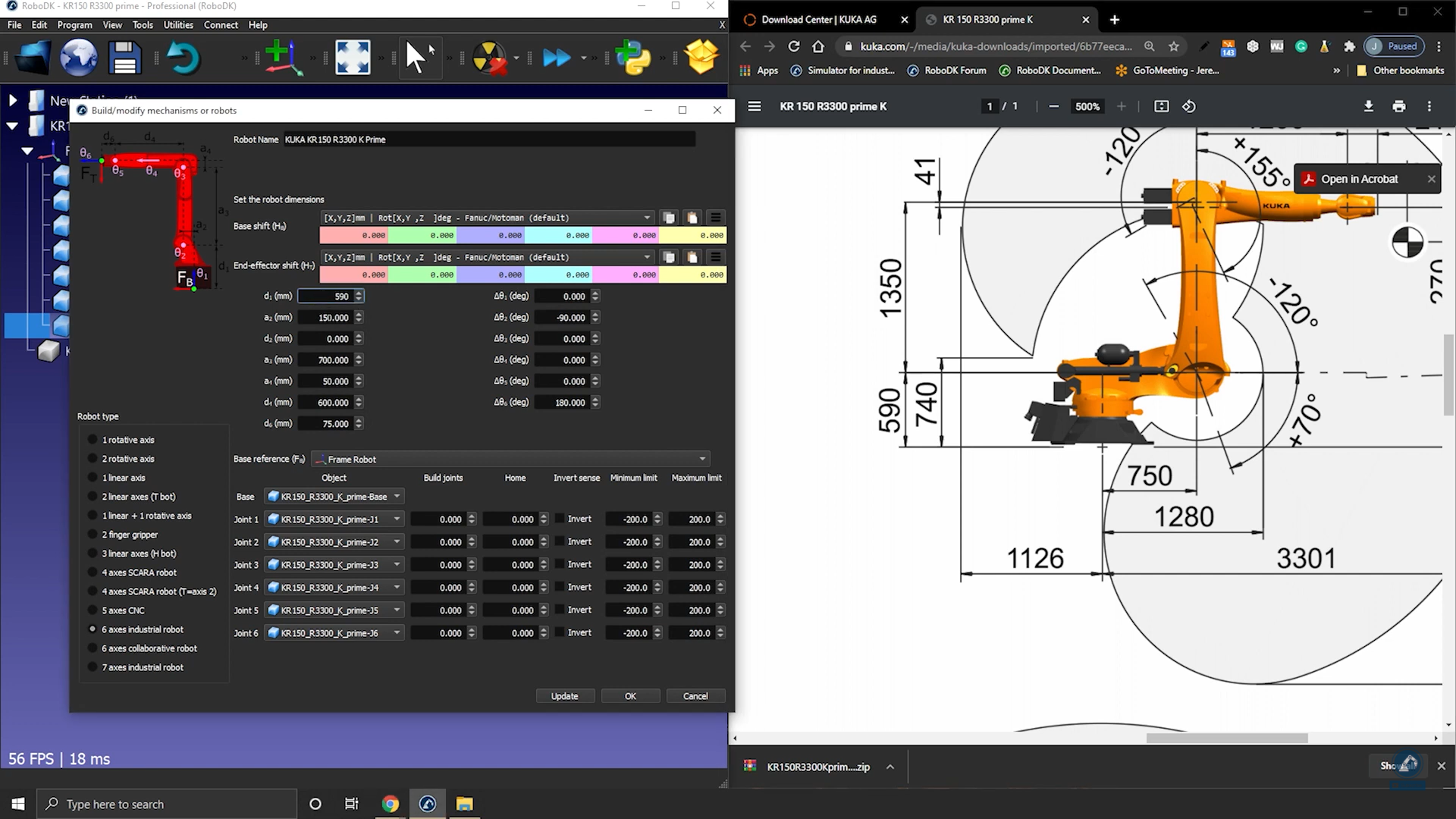
10.Preencha as dimensões do robô abrindo a folha de dados.
11.No esboço 3D da folha de dados, você encontrará todos os valores que está procurando. Preencha os valores corretos no RoboDK.
12.Quando Você estiver satisfeito com o resultado da cinemática do robô, selecione Atualizar.
Como acoplar eixos de robôs
Alguns robôs têm duas articulações acopladas, o que significa que dois dos valores de eixo do robô são dependentes. Por exemplo, os robôs Fanuc têm o eixo 2 e o eixo 3 acoplados.
Siga estas etapas para acoplar as articulações de seu robô no RoboDK:
1.Primeiro, clique duas vezes no robô para abrir o painel do robô.
2.Clique em Parâmetros para abrir a guia Parâmetros do robô
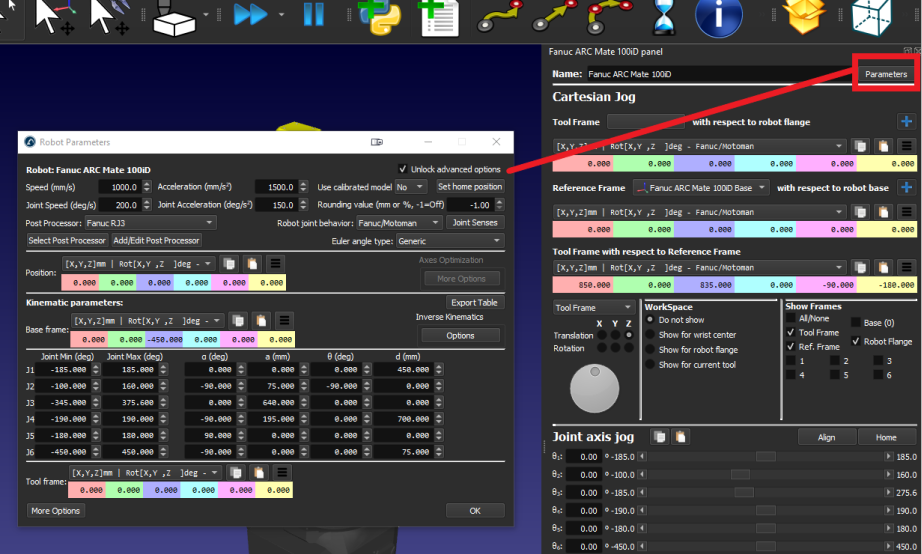
3.Marque a caixa Desbloquear opções avançadas.
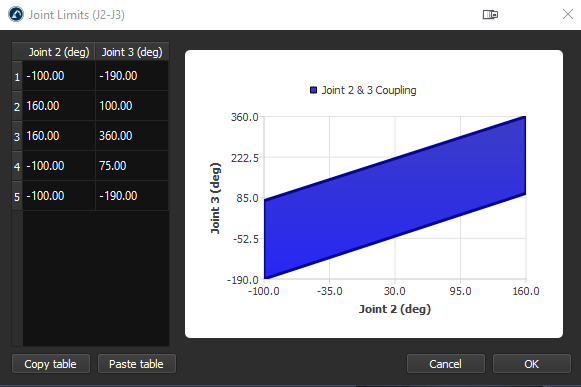
Clique em Sentidos da articulação para abrir a guia Sentido do eixo da articulação. Os primeiros 6 valores representam a direção de giro das articulações e o último valor é o acoplamento das articulações 2 e 3. Altere o 7º valor para -1 para vincular as articulações. Uma nova guia com o polígono de limite do eixo de acoplamento será aberta; você pode editar os limites para evitar que o robô colida consigo mesmo.